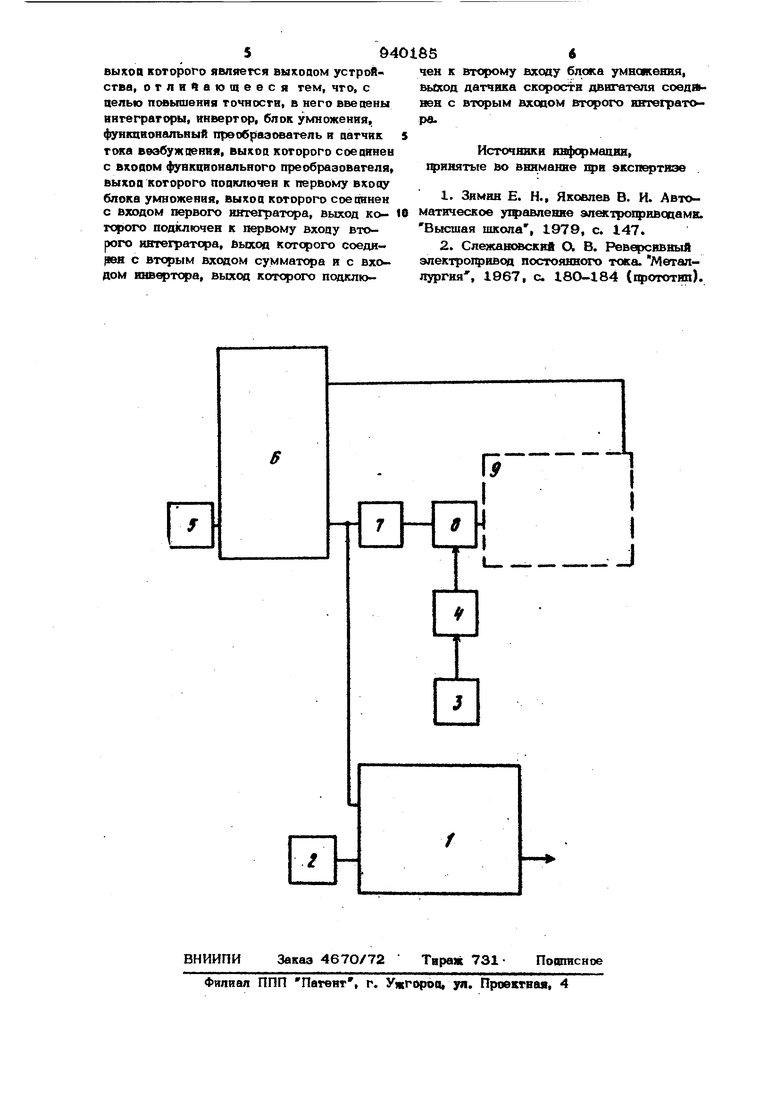
Изобретение относится к электроприво дам nccTOHiffloro тока и может быть ис- пол1 зовано для контроля технологических процессов, управления системами технологической автоматики и автоматического регулирования. Известно устройство для определения статической составляющей тока двигателя, содержащее последовательно соединенные тахогенератор (датчик скорости) и дифференцирующую цепь Г iT Недостатком этого устройства является плохая помехозащищенность дифференцирующей цепи и трудность настройки, что ведет к большой погрешности в выделении статического тока двигателя и, следовательно, к снажению точности опре деления статического тока. Наиболее близкое по технической сущности к изобретению устройство для опре деления статической составляющей тока двигателя содержит сумматор, один вход которого соединен с блоком задания полного тока, последовательно соединенные тахогенератор, дифференцирующую цепь и усилитель, в обратную цепь которого подключен датчик Холла. Выход усилителя подсоединен к другому входу сумматора 2. Недостатком схемы известного устрюйства является низкая точность в выделении статической составляющей тока из-за плохой помехозащищенности дифференц ующей цепи, что ведет к большой погрещности в определении статического тока двигателя; Цель изобретения - повыщение точности определения статической составляющей тока двигателя. Указанная цель достигается тем, что в устройство для определения статической составляющей тока двигателя, содержащее датчик скорости двигателя, датчик полного тока двигателя, выход которого подключен к первому входу сумматора, выход которого является выходом устройства, введены интеграторы, инвертор, блок умножения, функциональный преобразователь и датчик тока возбуждения, выход которого соединен с входом функционельного преобразователя, выход котсрого подключен к первому вхоДу блока умножения, выход которого соединен с Входом первого интегратора, выход кото рого подключен к первому входу второго интегратора, выход которого соединен с вторым входом сум матера и с входом инвертора, выход которого подключен к второму входу блока умножения, выход датчика скорости двигателя соединен с вторым входом второго интегратора. На чертеже представлена схема пред лагаемого устройства. Устройство содержит сумматор 1, дат чик 2 полного тока двигателя, датчик 3 тока возбуждения двигателя, функциональ ный 1феобразователь 4, датчик 5 скорости двигателя, интегратс 6, инверTqp 7, блок 8 умножения, интегратор 9. Устройство работает следующим образом. В исходном состоянии на выходе датчика 5 скорости двигателя сигнал равен нулю. Следовательно, на выходе датчика 2 полного тока сигнал также равен нулю На выходе датчика 3 тока возбуждения 1фисутствует сигнал, равный номинальному. Этот сигнал поступает на вход функционального преобразователя 4, который преобразует его в сигнал, гфопорциональный магнитному потоку, в результате на выходе функционального греобразователя 4 будет сигнал, Щ)оп циональный номинальному магнитному потоку. На выходах интегратора 6, 7, блока 8 умножения, интегратора 9 сигнал отсутствует. На выходе сумматора 1 сигнал равен нулю. По команде оператора на вьосоде датчика 5 сигнал линейно нарастает до заданной скорости двигателя валков. Под действием динамического тока реальный двигатель разгоняется до заданной скаростя. На выходе интегратора 6 появляется сигнал, щюпорциональный динамическому току, 14)ичем интегратор 6 осуществляет модел ювание замкнутого регулятора тока и сисметы автоматического утфавления электрощэиводом. Поскольку к реальному двигателю не 1Ц впаже11а статическая нагрузка, то на выходе датчика 2 полного тока появляется сигнал, пропорциональный только дина мическому току. Поэтому на выходе сумматора 1 сигнал будет равен нулю. При появлении статической нагрузки в момент разгона на выходе датчика 2 полного тока появляется сигнал, пропорциональный сумме динамической и статической составляющей тока двигателя. Поскольку к интегратору 6, инвертору 7, блоку 8 умножения и интегратору 9 не 1филожен аналог статической нагрузки, то на выходе интегратс а 6 появляется сигнал, пропорциональный динамическому току двигателя. Этот сигнал поступает на инвертор 7 и инвертируется, затем умножается блоком 8 умножения на сигнал, щзопорциональный магнитному потоку двигателя. На выходе блока 8 умножения появляется динамический момент. Интегратор 9 моделирует электромеханическую часть двигателя. Под действием динамического момента на выходе интегратора 9 появляется сигнал, 1фопорциональный скорости вращения двигателя. Этот сигнал поступает на втсрой вход интегратора 6. Поскольку отсутствует аналог статической нагрузки, то на выходе интегратора 6 остается сигнал, гфопорциональный динамическому току двигателя. Таким образом, устанавливается величина динамического тока. Сигнал динамического и сигнал полного токов, поступающие от датчика 2, алгебраически сумм1фуются сумматором 1. На вьосоде сумматора 1 появляется сигнал, щюпорциональиый статическому току двигателя. При гфокатке на постоянной скорости динамический ток реального двигателя равен нулю, т.е. с датчика 2 полиого тока поступает иа суммат 1 только статическая составляющая тока. При следующем приложении статической нагрузки к реальному двигателю цикл работы данного устройства повторяется. Использование 1федлагаемого устройства позволяет повысить точность вьщеления статического тока двигателя, обеспечивая устойчивую работу системы автоматического регулв|х ваиия межклетевого натяжения, что позволяет увеличить качество щхжатки. Формула изобретения Устройство для определения статической составпяющеЛ тсжа двигателя, сооержашее оатчик скоросгв овигателя, пагчнк полного гока овигагеля, выхоа которого пооключен к первому вхооу сумматора.
выхоп которого является выхопом устройства, отличающееся тем, что, с целью повышения точности, в него ввеоены интеграторы, инвертор, блок умножения, функциональный преобразователь и аатчик тока Е9эбужаения, выхоа которого соеаинен с входом функционального преобразователя выхоа которого попключен к первому вхооу блока умножения, выхоа которого соецинен с входом первого интегратора, выход ко горого подключен к первому входу второго интегратора, Выхоа которого соедирея с вторым входом сумматора и с входом инвертора, выход которого подключен к второму входу блока умнсясення, вьСсод датчика скорости двигателя с вторым входом второго иигегратора.
Источники ивформацни, Щ}инятые во внимание при экспертизе
1.Зимнн Е. Н., Яковлев В. И. Автоматическое управление электро1фиводамк. Высшая школа , 1979, с. 147.
2.Слежановский О, В. Реверсивный электрощэивод постоянного тока. Металлургия, 1967, с. 18О-184 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения электри-чЕСКиХ пАРАМЕТРОВ элЕКТРОдВигАТЕля | 1978 |
|
SU813599A1 |
| Самонастраивающаяся система с приводом на муфтах | 1987 |
|
SU1444712A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
| Устройство для регулирования межклетевых натяжений | 1984 |
|
SU1174112A1 |
| Устройство защиты горных машин от перегрузок | 1982 |
|
SU1082948A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ПЕРЕГРЕТОГО ПАРА В МНОГОТОПЛИВНОМ ПАРОГЕНЕРАТОРЕ | 1991 |
|
RU2044214C1 |
| Устройство для регулирования скорости прокатки | 1989 |
|
SU1786472A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Г
I
и
