1
Изобретение относится к рег-улированию режимов работы горных машин и может быть использовано для защиты горных машин, в частности скребковых конвейеров, от перегрузок.
Известен способ защиты горных машин, основанный на измерении второй производной скорости и воздействия этого сигнала на муфту Г1.
Однако данный способ обеспечивает защиту горных машин только при резких изменениях динамического момента и не защищает от бросков электромагнитного момента в стопорных режимах, кроме того, способ характеризуется невысоким быстродействием, что связано с наличием инерционных элементов, воздействующих на муфту в режимах перегрузок.
Известен также способ защиты горных мащин, в частности скребковых конвейеров, основанный на измерении с помощью магнитоупругих датчиков усилий в цепях и отключении электропривода при появлении асимметрии нагрузок или больших усилий в цепи Г2
В устройстве для реализации указанного способа измеряется момент нагрузки и при увеличении сигнала, пропорционального разности усилий в цепи, выше заданного уровня отключается электропривод.
Указанный способ ограничивает усилия в цепном тяговом органе конвейера как в режимах динамических нагрузок, так и при статическом нагружении на одинаковом уровне и не регулирует время работы при заданном уровне статических перегрузок.
Для пуска полностью загруженного скребкового конвейера требуется кратковременно развивать момент, равный 3-3,5 номинального значения. С другой стороны, в режимах динамических перегрузок, связанных с заклиниванием цепного тягового органа конвейеров, момент необходимо ограни%1вать на более низком уровне.
Наиболее близким к предлагаемому является устройство для защиты горных машин от перегрузок, содержащее электродвигатель, подключенный к выпрямителю, управляющий вход которого подключен к задатчику скорости, датчик частоты вращения, соединенный через блок дифференцирования с первым входом сумматора и датчик токаСЗ
/,.Я2
Изнестное у с тронет ;) о|-раничннает момент нагрузки, что не обеспеч нает раздельного ограничения динамических и статических перегрузок и регулирования времени работы при различных величинах статических перегрузок .
Цель изобретения - независимое ограничение статических и динамических нагрузоЛ
Указанная цель достигается тем, что в устройство, содержащее электродвигатель, подключенный к выпрямителю, управляющий вход которого подключен к задатчику скорости, датчик частоты вращения, соединенный через блок дифференцирования с первым входом сумматора, и датчик тока, введены вторые блок дифференцирования и сумматор, а также интегратор, формирователь сигнала магнитного потока, блок уставки электромагнитного момента, блок умножения, блок уставки производной момента нагрузки, компараторы и блок уставки интеграла от сигнала электромагнитного момента, причем первый выход датчика тока соединен с входом формирователя сигнала магнитного потока, выход которого подключен к первому входу блока умножения, а второй выход датчика тока соединен с вторым входом блока умножения, первьш выход которого подключен к второму входу первого сумматора, выход первого сумматора соединен с входом второго блока дифференцирования, выход которого подключен к первому входу первого компаратора, второй вход которого соединен с выходом блока уставки производной момента нагрузки, выход первого компаратора подключен к входу задатчика скорости и выходу второго компаратора, первьш вход которого соединен с блоком уставки интеграла от сигнала электромагнитного момента, при этом блок уставки электромагнитного момента соединен с первым входам второго сумматора, второй вход которого соединен с вторым выходом блока умножения, а выход второго сумматора соединен через интегратор с вторым входом второго компаратора.
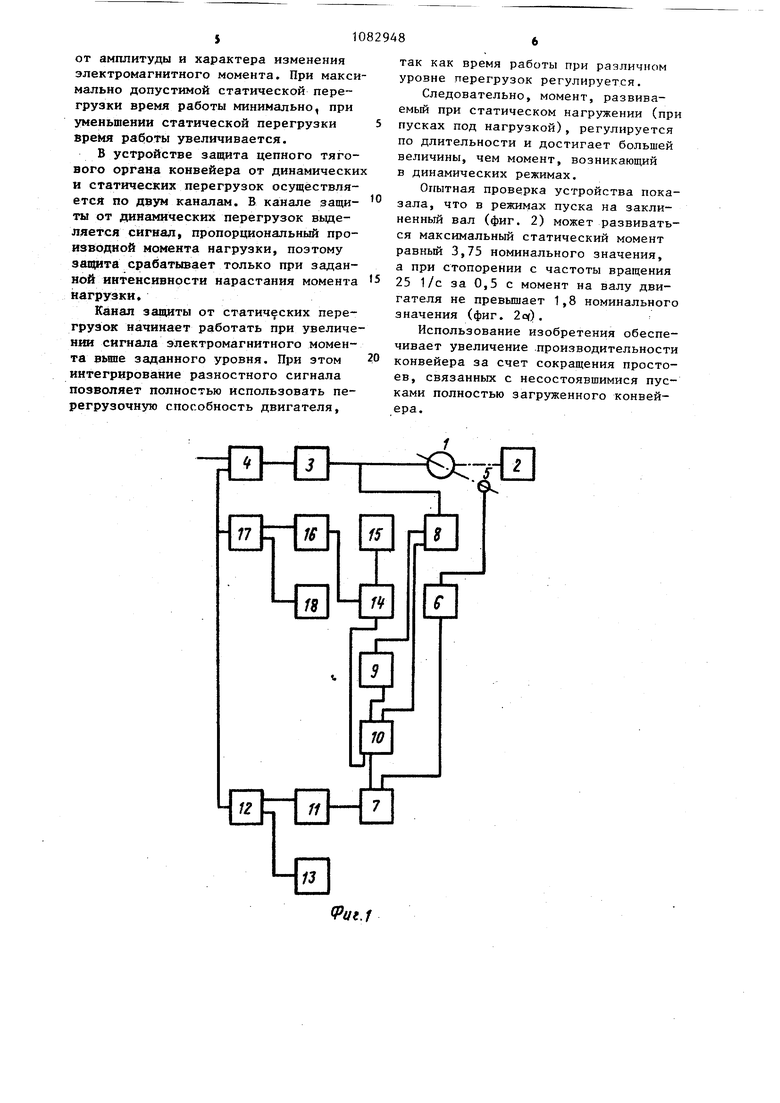
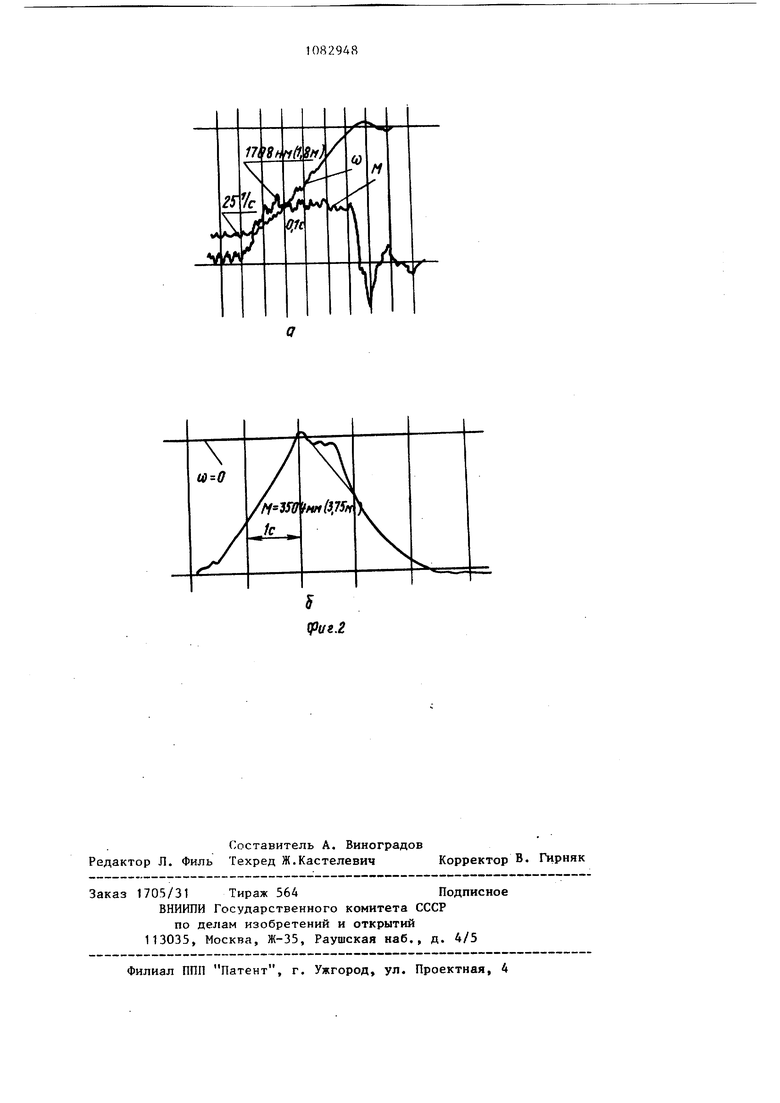
На фиг. 1 представлена схема устройства, реализующего предлагаемый способ; на фиг. 2 - динамические характеристики, полученные при опытной проверке устройства. Vi; г|)( nKJiHiiaei в счбя члект роднигатол), 1 постояиногч) тока, соединенпь.ш с цепным тягоным органом конвейера 2 и питаемый выпрямителем 3, управляющий вход которого соединен с задатчиком 4 скорости. Выход датчика 5 частоты вращения, измеряющего частоту вращения электродвигателя 1, соединен с входом первого блока 6 дифференцирования, выход которого подключен к первому входу первого сумматора 7, Один выход датчика 8 тока, измеряющего ток нагрузки электродвигателя 1, соединен с входом формирователя 9 сигнала магнитного потока, а другой - с вторым входом блока 10 умножения. Первый вход блока 10 умножения соединен с выходом формирователя 9 магнитного потока, а первый выход блока 10 умножения подключен к второму входу первого сумматора 7,выход которого соединен с входом второго блока 11 дифференцирования. Выход второго бло ка 11 дифференцирования подключен к первому входу первого компаратора 12, второй вход которого соединен с выходом блока 13 уставки производной момента нагрузки, выход первого компаратора 12 подключен к входу 1задатчика 4 скорости. Второй выход блока 10 умножения соединен с одним 1из входов второго сумматора 14, второй вход которого подключен к выходу блока 15 уставки электромагнитно момента, выход второго сумматора 14 соединен с входом интегратора 16, выход которого соединен с одним из входов второго компаратора 17. Второй вход второго компаратора 17 подключен к выходу блока 18 уставки интеграла от сигнала электромагнитного момента, а его выход - к входу задатчика 4 скорости. Устройство работает следующим образом. Сигнал датчика 5 частоты вращения поступает на вход первого блока 6 дифференцирования, на выходе которо формируется сигнал, пропорциональный Н, -К, динамическому моменту где Ш - частота вращения; коэффициент пропорциональности. Сигнал с выхода датчика 8 тока подается на второй вход блока 10 умножения и на вход формирователя 9 сигнала магнитного потока, выход которого соед нен с первым входом блока 10 умноже 48 ния на выходе блока 10 умножения формируется , пропорциональный электромагнитному моменту Uj k 1Ф, где i - ток нагрузки, Ф - магнитный поток, k2- коэффициент пропорциональности . Сигналы и и и суммируются в сумматоре 7, напряжение на выходе которого пропорционально моменту нагрузки. Далее сигнал с выхода сумматора 7 через второй блок 11 дифференцирования поступает на один из входов первого компаратора 12, где сравнивается с сигналом блока 13 уставки производной Момента нагрузки. При увеличении производной момента нагрузки выше уставки на выходе первого компаратора 12 формируется сигнал, который поступает в задатчик 4 скорости и сбрасывает задающее воздействие до нуля. Напряжение на выходе управляемого выпрямителя 3 также уменьшается до нуля, и электродвигатель 1 останавливается, защипшя цепной тяговый орган конвейера 2 от перегрузки. Сигнал с второго выхода блока 10 умножения поступает на один из входов второго сумматора 14 и сравнивается с сигналом блока 15 уставки электромагнитного момента. При увеличении сигнала электромагнитного момента выше уровня уставки разностный сигнал с выхода второго сумматора 14 поступает на вход интегратора 16. На выходе интегратора 16 формируется сигнал ,1(3M)dt, коэффициент пропорциональности;сигнал блока уставки электромагнитного момента; сигнал электромагнитного момента. Выходной сигнал интегратора 16 сравнивается во втором компараторе 17 с сигналом блока 18 уставки интегала от сигнала электромагнитного омента. При увеличении интеграла от сигнала электромагнитного момента выше уровня сигнал с выхода второго компаратора 17 уменьшает задающее воздействие в задатчике 4 скорости о нуля, что приводит к снятию электомагнитного момента. Следовательно, время работы в режиме статических пеегрузок регулируется в зависимости
от амплитуды и характера изменения электромагнитного момента. При максимально допустимой статической перегрузки время работы минимально, при уменьшении статической перегрузки время работы увеличивается.
В устройстве защита цепного тягового органа конвейера от динамически и статичес:ких перегрузок осуществляется по двум каналам. В канале защиты от динамических перегрузок выделяется сигнал, пропорциональный производной момента нагрузки, поэтому защита срабатывает только при заданной интенсивности нарастания момента нагрузки.
Канал защиты от статических перегрузок начинает работать при увеличении сигнала электромагнитного момента вьнпе заданного уровня. При этом интегрирование разностного сигнала позволяет полностью использовать перегрузочную способность двигателя,
так как время работы при различном уровне перегрузок регулируется.
Следовательно, момент, развиваемый при статическом нагружении (при пусках под нагрузкой), регулируется по длительности и достигает большей величины, чем момент, возникающий в динамических режимах.
Опытная проверка устройства показала, что в режимах пуска на заклиненный вал (фиг. 2) может развиваться максимальный статический момент равный 3,75 номинального значения, а при стопорении с частоты вращения 25 1/с за 0,5 с момент на валу двигателя не превышает 1,8 номинального значения (фиг. 2с).
Использование изобретения обеспечивает увеличение производительности конвейера за счет сокращения простоев, связанных с несостоявшимися пусками полностью загруженного конвейера.
Ut.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2012 |
|
RU2481202C1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
| Электропривод постоянного тока | 1984 |
|
SU1264286A1 |
| Способ адаптивного управления исполнительным механизмом | 2023 |
|
RU2821298C1 |
УСТРОЙСТВО ЗАЩИТЫ ГОРНЫХ МАШИН ОТ ПЕРЕГРУЗОК, содержащее электродвигатель, подключенный к выпрямителю, управляющий вход которого подключен к задатчику скорости, датчик частоты вращения, соединенный через блок дифференцирования с первым входом сумматора, и датчик тока, отличающееся тем, что, с целью независимого ограничения статических и динамических нагрузок, в него введены вторые блок дифференцирования и сумматор, а также интегратор, формирователь сигнала магнитного потока, блок уставки электромагнитного момента, блок умножения, блок уставки производной момента нагрузки, компараторы и блок уставки интеграла от сигнала электромагнита момента, причем первый выход датчика тока соединен с входом формирователя сигнала магнитного потока, выход которого подключен к первому входу блока умножения, а второй выход датчика тока соединен с вторым входом блока умножения, первый вькод которого подключен к второму входу первого сумматора, выход первого сумматора соединен с входом второго блока дифференцирования, выход которого подключен (Л к первому входу первого компаратора, второй вход которого соединен с выходом блока уставки производной момента нагрузки, выход первого компаратора подключен к входу задатчика скорости и выходу второго компаратоipa, первый вход которого соединен 30 с блоком уставки интеграла от сигна о ;о ла электромагнитного момента, при этом блок уставки электромагнитного 4;: момента соединен с первым входом второго сумматора, второй вход кото00 рого соединен с вторым выходом блока умножения, а выход второго сумматора соединен через интегратор с вто-. входом второго компаратора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ЗАЩИТЬЗ ГОРНЫХ МАШИН ОТ ДИКА/У1КЧЕСККХПЕРЕГРУЗОК | 0 |
|
SU287466A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Магнитоупругие датчики в автоматике | |||
| Киев, Техника, 1972, с | |||
| Способ изготовления замочных ключей с отверстием для замочного шпенька из одной болванки с помощью штамповки и протяжки | 1922 |
|
SU221A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
