1
Изобретение относится к приводам металлорежущих станков или другого оборудования, на которых требуется осуществить последовательно рабочую подачу и позиционирование подвижного узла в нескольких точках рабочего хода.
Известен гидравлический следящий привод, содержащий исполнительный гидроцилиндр, задающее устройство, включающее корпус, дросселирующий золотник, установленный в гильзе, подвижную подвеску с расположенными в ней щупом и датчиком обратной связи по положению и микроупоРы 1.
Недостатками известного привода является сложность системы управления, обусловленная кинематическими связями элементов в задающее устройство, что значительно снижает надежность работы привода и увеличивает затраты на его переналадку.
Цель изобретения - упрощение системы управления.
Поставленная цель достигается тем, что задающее устройство снабжено плунжерами, установленными в корпусе с возможностью взаимодействия с микроупорами и подвижной подвеской, а гильза золотника установлена с возможностью перемещения относительно корпуса и связана со щупом и датчиком обратной связи по положению, а также через упругие элементы с подвижной подвеской.
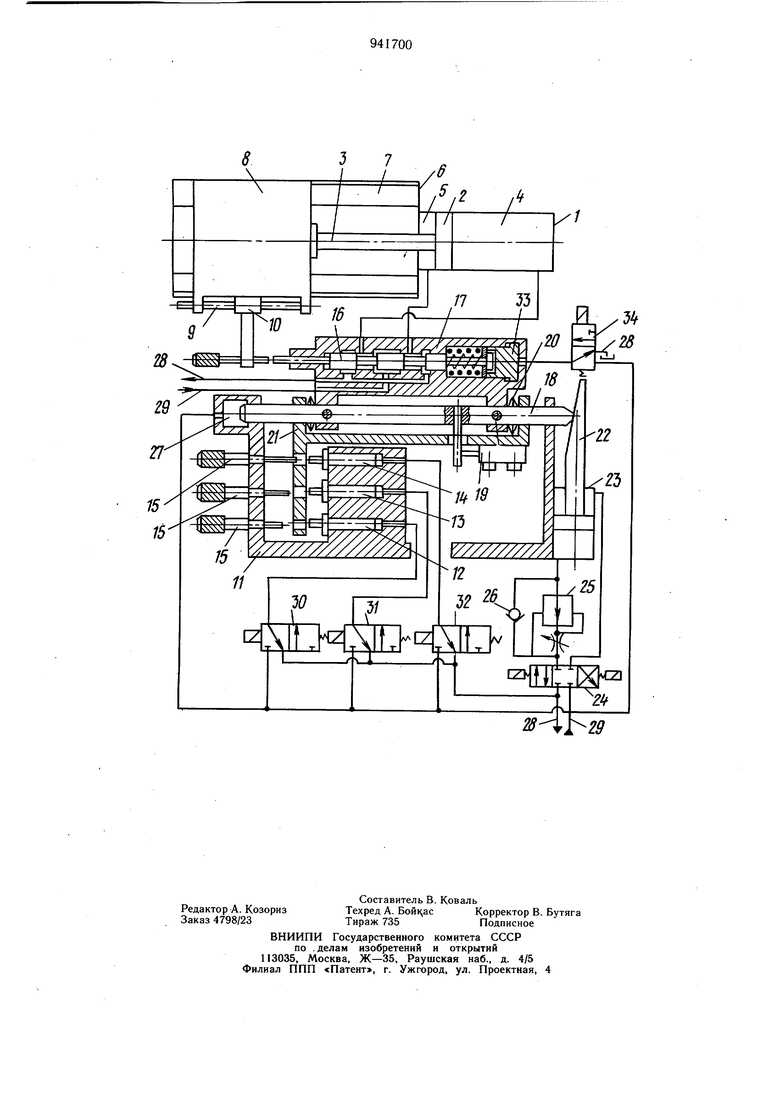
На чертеже представлена принципиальная схема привода.
Привод содержит исполнительный гидроцилиндр 1 с размещенными в нем порщнем 2 и штоком 3 с образованием рабочих
10 полостей 4 и 5.
Гидроцилиндр 1 установлен на станине 6 с направляющими 7, на которых базируется стол 8, соединенный со штоком 3 гидроцилиндра 1. На поверхности стола 8 находится перемещаемый при наладке винтом 9
15 подвижный упор 10. Кроме того, привод содержит задающее устройство, включающее корпус 11 с установленными в нем плунжерами 12, 13 и 14 с возможностью взаимо2Q действия с микроупорами 15, дросселирующий золотник 16, расположенный в гильзе 17, жестко связанный со щупом 18, с датчиком 19 обратной связи по положению, а через упругие элементы 20 - с подвижной подвеской 21. Щуп 18 взаимодействует с клиновой ползушкой 22 гидроцилиндра 23, движение которого задается гидрораспределителем 24, регулятором 25 скорости с обратным клапаном 26. Щуп18 образует с корпусом 11 полость 27. Плунжеры 12, 13 и 14 сообщаются с магистралями слива и нагнетания, соответственно 28 и 29, через гидрораспределители 30, 31 и 32. В гильзе 17 установлен подпружиненный поршень 33, сообщенный с гидрораспределителем 34. Привод работает следующим образом. После наладки привода на нужный цикл работы, которая осуществляется путем установки микроупоров 15 по имеющимся на них лимбам, подается команда на включение гидрораспределителя 34, в результате чего порщень 33 перемещается до упора, сдвигая дросселирующий золотник 16 таким образом, что нарущается равновесие сил деиствующих на поршень 2 исполнительного гидроцилиндра 1, и последний перемещает стол 8 до контакта упора 10 с дросселирующим золотником 16, после чего стол 8 останавливается в исходном положении. Затем подается команда на включение гидрораспределителя 24 и одного из гидрораспределителей 30, 31 и 32, например 30. При этом плунжер 12 перемещается до контакта с соответствующим микроупором 15 и движение гильзы 17 регулируется посредством щупа 18, взаимодействующего с клиновой ползушкой 22 гидроцилиндра 23, скорость которой определяется настройкой регулятора 25. Движение гильзы 17 дросселирующего золотника 16 отслеживается порщнем 2 со щтоком 3 гидроцилиндра 1 до момента, пока подвижная подвеска 21 не упрется в торец плунжера 12, что приведет к рассогласованию входного и выходного л f движения, и датчик 19 обратной связи выдаст команду датчику 19 на останов гидроцилиндра 23. При необходимости продолжить движение стола 8 подается команда на выключение гидрораспределителя 31 и включение гидрораспределителя 30. Это приводит к устранению возникшего рассогласования с помощью упругих элементов 20, и датчик 19 обратной связи по положению вновь включает датчик 19 на перемещение ползущки 22 гидроцилиндра 23 в прежнем направлении до упора подвижной подвески 21 в плунжер 13. Цикл работы повторяется столько раз, сколько имеется выставленных по микроупорам 15 плунжеров 12, 13 и 14. После окончания работы гидрораспределитель 34 соединяет подпружиненный порщень 33 с магистралью 28 слива, что возвращает дросселирующий золотник 16, а следовательно, и стол 8 в исходное положение, а датчик 19 реверсирует гидроцилиндр 23 в исходное положение, после чего цикл может быть повторен. Использование предложенного привода позволит уменьщить количество управляющих элементов до минимума, и тем самым повысить надежность привода и облегчить его наладку в случае многопроходной обработки на станках в условиях серийного производства. Формула изобретения Гидравлический следящий привод, содержащий исполнительный гидроцилиндр, задающее устройство, включающее корпус, дросселирующий золотник, установленный в гильзе, подвижную подвеску с расположенными в ней щупом и датчиком обратной связи по положению и микроупоры, отличающийся тем, что, с целью упрощения системы управления приводом, задающее устройство снабжено плунжерами, установленными в корпусе с возможностью взаимодействия с микроупбрами и подвижной подвескои, а гильза золотника установлена с возможностью перемещения относительно корпуса и связана со щупом и датчиком обратной связи по положению, а также через упругие элементы с подвижной подвеской. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 761750, кл. F 15 В 9/02, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU598780A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| Привод гидравлического пресса | 1983 |
|
SU1147597A1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО РАБОЧЕГО ОБОРУДОВАНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2012742C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| НАСОСНЫЙ АГРЕГАТ | 2006 |
|
RU2305797C1 |
| Гидравлический привод подачи стола фрезерного станка | 1989 |
|
SU1646718A1 |
| Устройство для автоматической ориентации рабочего инструмента по краю материала | 1972 |
|
SU476869A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2271306C1 |