Изобретение относится к автоматическому регулированию и может найти применение для автоматического вьщерживания заданного уклона при проведении мелиоративных, землеройных и дорожных работ, например при строительстве закрытого дренажа с , применением бестраншейных дреноукладчиков.
Известно устройство для управле- . аип различными машинами, содержащее отражатель и модулятор светового потока, расположенные в пункте наведения Г .
Недостатком этого устройства является наличие погрешности задания оптической оси, связанной с наличи(бм системы модуляции светового потока.
Наиболее близким к изобретению по технической сущности является устройство для управления различными подвижными объектами, содержащее источник света и фотоприемник, связанный через датчик команд с блоком управления приводом объекта, причем источник света установлен в Пункте управления, а фотогриемник с датчиком команд - на объекте И.
В реальных условиях эксплуатации землеройной машины (например, дреноукладчика) пункт управления располагается на участках, где отсутствует стационарная электрическая сеть. Поэтому для питания источника света, который в известном и ему подобных устройствах находится в пункте управления, применяются
10 автономные источники питания - аккумуляторы, имеющие большую емкость и вес. Кроме того, источники света (азерные излучатели) систем управления землеройными машинами имеют
15 большой собственный вес (несколько десятков килограмм), что обусловлено наличием высоковольтных блоков питания (до 10000 В) и требованиями техники безопасности при
20 эксплуатации устройств в полевых условиях. Эти обстоятельства создают неудобства при транспортировке излучателя в полевых условиях что является недостатком известно25го устройства.
Цель изобретения - улучшение условий эксплуатации устройства.
Поставленная цель достигается теМ| что в устройстве, содержащем пункт
30 управления и источник света,- оптичесч
ки связанный с фотоприемником въкодом, подключенным к входу командного блока, выход которого связан с вхо:дом блока управления приводом рабочего органа, источник света установлен на рабочем органе, а фотоприемник и командный блок расположены в пункте управления, причем командный блок связан с блоком управления приводом рабочего органа посредством радиоканала.
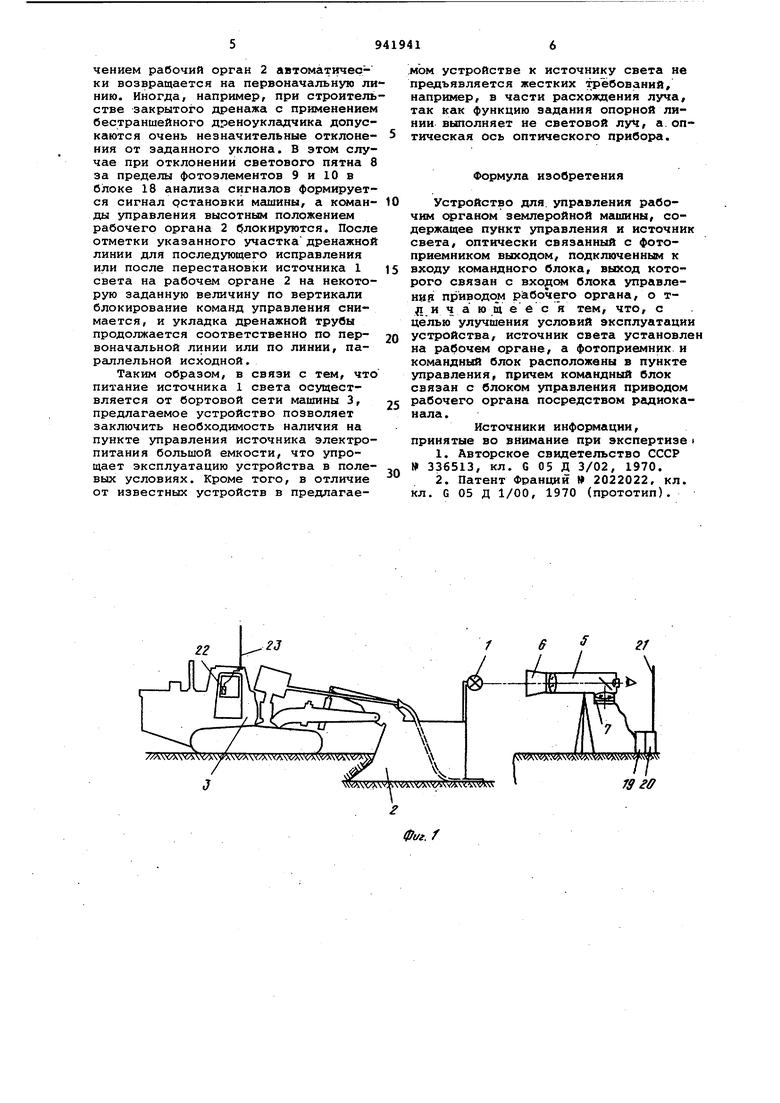
На фиг.1 схематически изображено пространственное расположение землеройной машины (бестраншейного дреноукладчика) и предлагаемого устройства для управления рабочим органом; на фиг,2 - блок-схема предлагаемого устройства.
Система устройств содержит источник 1 света, укрепленный на рабочем органе 2 машины 3, и установленные в пункте 4 упрайления оптический
прибор. 5, оптическая ось которого установлена параллельно проектному уклону (в качестве оптического прибора использован усовершенствованный, с цалью увеличения глубины резкости
изображаемого пространства, теодолит) , бленду 6 для исключения попадания прямых солнечных лучей в объек тив оптического прибора и фотоприемник 7. Фотоприемник 7 (фиг.2) состоит из четырех фотоэлементов, разме ценных в плоскости, на которую сфокусировано в виде светового пятна 8 изображение источника 1 света, приче фотоэлементы 9 и 10 включены в моетовую схему и служат для управления высотным положением рабочего органа, а фотоэлементы 11 и 12 предназначены для задания направления движения мгш1ины. Устройство содержит также блок обработки сигналов 13, который включает полосовые фильтры 14-17, настроенньаеначастоту пу7Й9саций источника 1 света, и блок 18 анализа сигналов, командный блок 19, радиопередатчик 20 с антенной 21, радиоприемник 22 с антенной 23, блок 24 управления приводом рабочего органа, состоящий из дешифратора 25 кОмандНЕлх сигналов и блока 26 сигнализации, привод 27 рабочего органа. Кроме того, устройство содержит модулятор, периодически изменяияций яркость источника 1 света, с целью надежного выделения его в дневное время
Устройство для управления рабочим органом землеройной машины работает следующим образом.
Источник 1 сйета устанавливают на заданном расстоянии от днообразуиндей Чромки рабочего органа 2 машины 3. СЬетовой поток, промодулированнгЛ по амплитуде с помощью модулятора, проходит через оптический прибор 5, снабженный блендой б, и фокусируетйя в плоскости фотоприемника 7 в виде светового пятна 8. Перед началом работы производится заглубление рабочего органа 2 до тех пор, пока площади засветки фотоэлементов 9 и 1 не окажутся, равными. Вертикальное перемещение рабочего органа 2 в процессе работй вызывает изменение соотношения площадей засветки этих фотоэлементов и их проводимости. При этом в измерительной диагонали мостовой схемы появляются сигналы разбаланса. Эти сигналы проходят через полосовые фильтры 14 и 15 и по.ступают в блок 18 анализа сигналов, где щзоизводится сравнение их ат шлитуд. Вйходныё сигналы этого блока управляют работой командного блока 19, в котором вырабатываются команды на перемещение рабочего органа 2 в направлении, противоположном смещению светового пятна 8 на мишени. При изменении направления движения машины 3 световое пятно 8 попадает на фотоэлемент 11 или 12. Сигналы с этих фотоэлементов проходят через фильтры 16 или 17 и поступают на командный блок 19, где формируется команда поворота машины 3 влево или вправо. С выхода этой схемы сигналы поступают в радиопередатчик 20. Излучение антенны 21 передатчика принимается радиоприемником 22 с антенной 23, установленным на машине 3. С выхода радиоприемника 22 сигналы издаются на блок 24.управления. Выделение команд управления из приня.того сигнала производится с помощью дешифратора 25 команд. Команды изменения высотного положения рабочего органа -управляют приводом рабочего органа 27, с помощью которого цроизводится подъем или опускание рабочего органа 2 с укрепленным на нем источником 1 света до тех пор, пока площади засветки фотоэлементов 9 и 10 не будут равны. Команднь1е сигналы изменения направления движения машины поступают в блок 26 сигнализации, где производится формирование звуковых или световых сигналов для оповещения водителя о необходимости поворота влево или вправо Если в процессе работы рабочий орган 2 машины 3 смещается от заданной линии, например из-за попадения на каменистое включение, то световое пятно 8 также перемещается за пределы светочувствительных поверхностей фотоэлементов 9 и 10. В режиме автоматического возврата рабочего органа 2 на заданную линию в блоке 18 анализа сигналов производится запоминание направления ухода светового пятна 6, и в блоке 19 формируется команда перемещения рабочего органа 2 в противоположном направлении. После прохождения участка с каменистым вклчением рабочий орган 2 автоматически возвращается на первоначальную ли нию. Иногда, например, при строительстве закрытого дренажа с применением бестраншейного дреноукладчика допускаются очень незначительные отклонения от заданного уклона. В этом случае при отклонении светового пятна 8 за пределы фотоэлементов 9 и 10 в блоке 18 анализа сигналов формируется сигнал дстановки машины, а команды управления высотным положением рабочего органа 2 блокируются. После отметки указанного участка дренажной линии для последующего исправления или после перестановки источника 1 света на рабочем органе 2 на некоторую заданную величину по вертикали блокирование команд управления снимается, и укладка дренажной трубы продолжается соответственно по первоначальной линии или по линии, параллельной исходной.
Таким образом, в связи с тем, что питание источника 1 света осуществляется от бортовой сети машины 3, предлагаемое устройство позволяет заключить необходимость наличия на пункте управления источника электропитания большой емкости, что упрощает эксплуатацию устройства в полевых условиях. Кроме того, в отличие от известных устройств в предлагаемом устройстве к источнику света не предъявляется жестких требований, например, в части расхождения луча, так как функцию задания опорной линии выполняет не световой луч, а.оптическая ось оптического прибора.
Формула изобретения
Устройство для. управления рабочим счрганом землеройной машины, содержащее пункт управления и источник света, оптически связанный с фотоприемником выходом, подключенным к входу командного блока, выход которого связан с входе блока управления приводом рабочего органа, о тд и ч а ю щ ее с я тем, что, с целью улучшения условий эксплуатации устройства, источник света установле на рабочем органе, а фотоприемник и командный блок расположены в пункте управления, причем командный блок связан с блоком управления приводом рабочего органа посредством радиоканала .
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР W 336513, кл. G 05 Д 3/02, 1970.
2.Патент Франций 2022022, кл. кл. G 05 Д 1/00, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движущимися объектами | 1980 |
|
SU906268A1 |
| Устройство управления рабочим органом дреноукладчика | 1983 |
|
SU1151647A1 |
| Датчик пути | 1990 |
|
SU1788164A1 |
| Система управления курсом движения землеройных машин | 1989 |
|
SU1647092A1 |
| Устройство автоматического управления бестраншейного дреноукладчика | 1982 |
|
SU1063949A2 |
| Фотоприемное устройство для контроля положения землеройной машины | 1988 |
|
SU1602948A1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| Система автоматизации планировочных работ | 1983 |
|
SU1099014A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ С ПОМОЩЬЮ СПУТНИКОВЫХ СИСТЕМ НАВИГАЦИИ GPS/ГЛОНАСС ИЛИ СВЕТОВЫХ, НАПРИМЕР ЛАЗЕРНЫХ, ИЗЛУЧАТЕЛЕЙ | 2011 |
|
RU2465410C1 |

