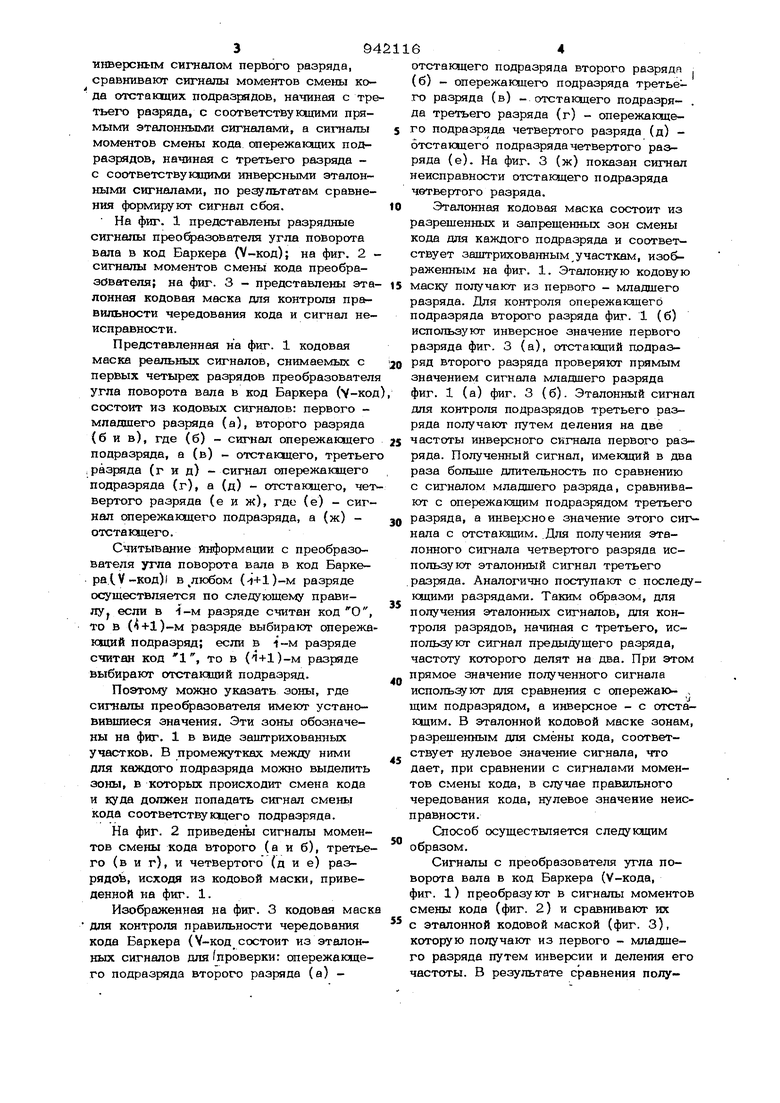
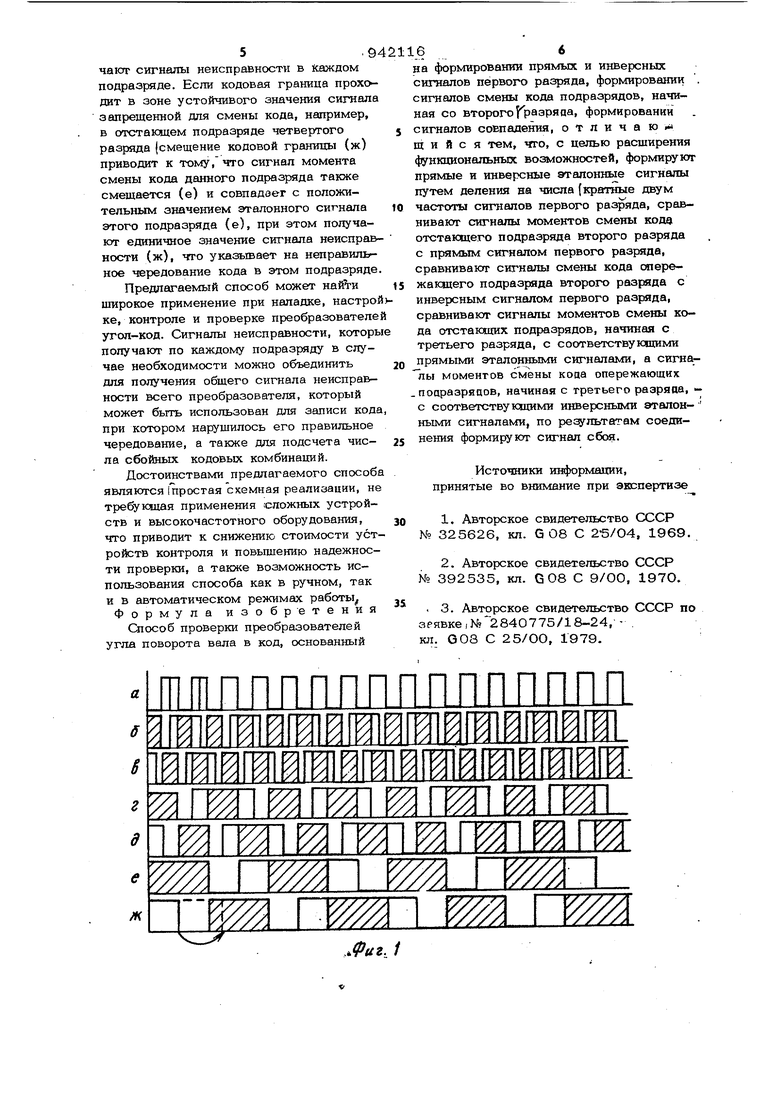
Изобретение относится к автоматике и вычислительной технике и служит для проверки преобразователей угла поворота вала в код Баркера. В известных способах проверка преобразователей угол-код осуществляется путем определения погрешности, при этом в качестве эталона для сравнения используется специально формируемый эталонный сигнал. О результатах проверки судят по величине погрешности l и 2 Недостатками этих способов являются необходимость получения эталонного сигн л а, синхронизация эталонного сигнала с сигналом преобразователя, а также высокие требования, предъявляемые к стабиль ности скорости вращения вала преобразователя. Причем величина ошибки однозначно не гарантирует правильность юредования кода преобразователя. Наиболее близким к предл 1гаемому . является способ для проверки преобразователей угла поворота вала в код Грея, где в качестве эталонного сигнала исполь зуется младший разряд испытуемого преобразователя с KOTopbDvi сравниваются сигналы моментов смены кода остальных разрядов З} . Недостатком этого способа является то, что он не учитывает особенности построения кода Баркера. Цель изофетения - расширение функциональных возможностей способа. Поставленная цель достигается тем, что в способе проверки преобразователей угла поворота вала в код, основанном на формировании выходных сигналов первого разряда, формировании сигнбшов смены кода подразрядов, начиная со второго, формировании сигналов совпадения, формируют прямые и инверсные эталонные сигналы путем деления на числа кратные двум частоты сигналов первого разряда, , сравнивают сигналы моментов смены кода отстающего подразряда второго ра&. . ряда с пр1гмым сигналом первого разряда, сравнивают сигналы смены кода опережающего подразряда второго разряда с 39 инверсным сигаалом первого разряда, сравнивают сигналы моментов смены кода отстаюцих подразрядов, начиная с тр тьего разряда, с соответствующими прямыми эталонными сигналами, а сигналы моментов смены кода опережающих подразрядов, начиная с третьего разряда с соответствующими инверсными эталонными сигналами, по результатам сравнения формируют сигнал сбоя. На фиг. 1 представлены разрядные сигналы преофазователя угла поворота вала в код Баркера (V-код); на фиг. 2 сигналы моментов смены кода преобразйвателя; на фиг. 3 - представлены эта лонная кодовая маска для контроля правильности чередования кода и сигнал не исправности. Представленная на фиг. 1 кодовая маска реальных сигналов, снимаемых с первых четырех разрядов преобразовател угла поворота вала в код Баркера (V-ко состоит из кодовых сигналов: первого младшего разряда (а), второго разряда (б и в), где (б) - сигнал опережающего подразряда, а (в) - отстакщего, третье i разряда (гид) - сигнал опережающего подразряда (г), а (д) - отстающего, че вертого разряда (е и ж), где (е) - сиг нал сшережаюцего подразряда, а (ж) отстающего. Считывание информации с преобразователя угла поворота вала в код Баркера. V-код) I в любом (-1+1)-м разряде осуществляется по следующему правилу если в 1-м разряде считан код О то в (4+1)-м разряде выбирают опережа ющий подразряд; если в 1-м разряде считан код 1, то в (l+D-M разряде выбирают отстающий подразркщ. Поэтому можно указать зоны, где сигналы преофазователя имеют установившиеся значения. Эти зоны обозначены на фиг. 1 в виде заштрихованных участков. В промежутках между ними для каждого подразряда можно выделить зоны, в которых происходит смена кода и куда должен попадать сигнал смень кода соответствующего подразряда. На фиг. 2 приведены сигналы моментов смены кода второго (а и б), третье го (в и г), и четвертого (д и е) разрядоЬ, исходя из кодовой маски, приведенной на фиг. 1. Изображенная на фиг. 3 кодовая мас для контроля правильности чередования кода Баркера (V-код состоит из эталонных сигналов для проверки: опережающе го подразряда второго разряда (а) 6отстакадего подразряда второго разрядп , (б) - опережа1сше.го подразряда третьего разряда (в) - отстакщего подразря- . да третьего разряда (г) - опережакщего подразряда четвертого разряда (д) отстающего подразряда четвертого разряда (е). На фиг. 3 (ж) показан сигнал неисправности отстающего подразряда четвертого разряда. Эталонная кодовая маска состоит из разрешенных и запрещенных зон смены кода для каждого подразряда и соответствует заштрихованным,участкам, изображенным на фиг. 1. Эталонную кодовую маску получают из первого - младшего разряда. Для контроля опережаклцего подразряда второго разряда фиг. 1 (б) используют инверсное значение первого разряда фиг. 3 (а), отстающий подраз- ряд второго разряда проверяют прямым значением сигнала младшего разряда фиг. 1 (а) фиг. 3 (б). Эталонный сигнал для контроля подразрядов третьего разряда получают путем деления на две частоты инверсного сигнала первого разряда. Полученный сигнал, имеющий в два раза больше длительность по сравнению С сигналом младшего разряда, сравнивают с опережаклцим подразрядом третьего разряда, а инверсное значение этого сигнала с отстаклцим. .Для получения эталонного сигнала четвертого разряда используют эталонный сигнал третье.го разряда. Аналогично поступают с последующими разрядами. Таким образом, для получения эталонных сигналов, для контроля разрядов, начиная с третьего, используют сигнал предыдущего разряда, частоту которого делят на два. При этом прямое значение полученного си.гнала испольауют для сравнения с опережак - , щим подразрядом, а инверсное - с отстающим. В эталонной кодовой маске зонам, разрешенным для смены кода, соответствует нулевое значение сигнала, что дает, при сравнении с сигналами моментов смены кода, в случае правильного чередования кода, нулевое значение неисправности. Способ осуществляется следующим образом. Сигналы с преобразователя угла поворота вала в код Баркера (V-кода, фиг. 1) преобразуют в сигналы моментов смены кода (фиг. 2) и сравнивают их с эталонной кодовой маской (фиг. 3), которую получают из первого - младшего разряда путем инверсии и деления его частоты. В результате сравнения получают сигналы неисправности в каждом подраэряде. Если кодовая граница проходит в зоне устойчивого значения сигнала запрещенной для смены кода, например, в отстающем подразряде четвертого разряда (смещение кодовой границы (ж) приводит к тому,что сигнал момента смены кода данного подразряда также смещается (е) и совпадает с положительным значением эталонного сигнала этого подразряда (е), при этом получают единичное значение сигнала неисправности (ж), что указьтает на неправильное чередование кода в этом подразряде Предлагаемый способ может найги широкое применение при наладке, настрой ке, контроле и проверке преобразователе угол-код. Сигналы неисправности, которы получают по каждому подразряду в случае необходимости можно объединить для получения общего сигнала неисправ- ности всего преобразователя, который может быть использован для записи кода при котором нарушилось его правильное чередование, а также для подсчета числ а сбойных кодовых комбинаций. Достоинствами предлагаемого способа являются (Ъростая схемная реализации, не требующая применения сложных устройств и высокочастотного оборудования, что приводит к снижению стоимости устройств контроля и повышению надежности проверки, а также возможность использования способа как в ручном, так и в автоматическом режимах работы Формула изобретения Способ проверки преобразователей угла поворота вала в код, основанный на формировании прямых и инверсных сигналов первого разряда, формировании . сигналов смены кода подразрядов, начиная со второго 1 рааряаа, формировании сигналов сошадения, о т л и ч а ю i щ и и с я тем, что, с целью расщирения функциональных воа южностей, формируют прямые и инверсные эталонные сигналы путем деления на числа (кратные двум частоты сигналов первого разряда, сравнивают сигналы моментов смены коде отстающего подразряда второго разряда с прямым сигналом первого разряда, сравнивают сигналы смены кода опережающего подразряда второго разряда с инверсным сигналом первого разряда, сравнивают сигналы моментов смены кода отстающих подразрядов, начиная с третьего разряда, с соответствующими прямыми эталонными сигналами, а сигналы моментов смены кода опережающих поцразряцов, начиная с третьего разряца, с соответствукадими инверсными эталонными сигналами, по результатам соединения формируют сигнал сбоя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 325626, кл. С 08 С 25/04, 1969. 2.Авторское свидетельство СССР № 392535, кл. G О8 С 9/ОО, 1970. . 3. Авторское свидетельство СССР по зРявке.М 2840775/18-24, -. кл. G08 С 2 5/ОС, 1979.
а S
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для проверки преобразователей угла поворота вала в код | 1980 |
|
SU942115A1 |
| Оптоэлектронный преобразователь перемещения в код | 1980 |
|
SU925195A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1984 |
|
SU1239861A1 |
| Оптоэлектронный преобразователь перемещения в код | 1988 |
|
SU1569985A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1980 |
|
SU936005A1 |
| Оптоэлектронный преобразователь перемещения в код | 1981 |
|
SU1005133A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1980 |
|
SU920815A1 |
| УСТРОЙСТВО для ДЕКОДИРОВАНИЯ ЦИКЛИЧЕСКИХи | 1971 |
|
SU316086A1 |
| Преобразователь перемещения в код | 1978 |
|
SU752422A1 |
| УСТРОЙСТВО для ПРОВЕРКИ ПРЕОБРАЗОВАТЕЛЕЙУГОЛ - КОД | 1972 |
|
SU416718A1 |
u
Фиг 2
Фиг.З
