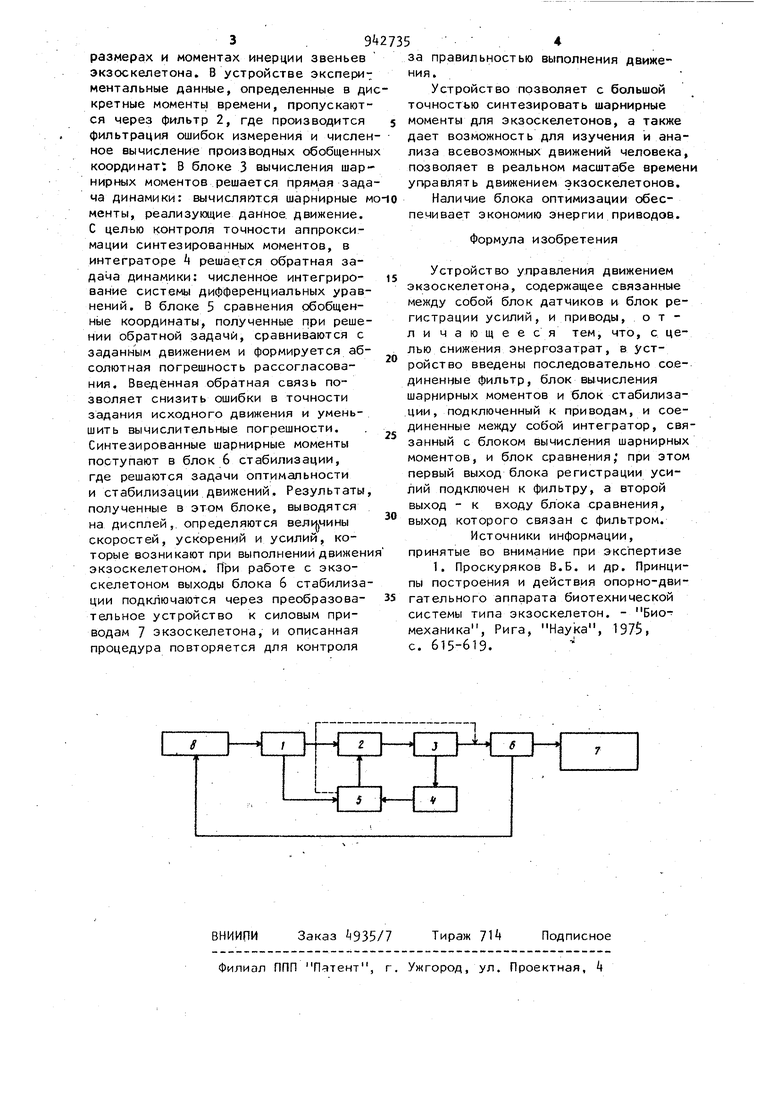
Изобретение относится к медицинской технике, а именно к устройствам управления и построения движений экзоскелетонов, и может быть использовано для анализа движений человека и для построения технически новых спортивных движений. . Известно устройство управления движением экзоскелетона, содержащее связанные между собой блок датчиков и блок регистрации усилий и приводы l. Однако это устройство сложно в эксплуатации и имеет большие энер-, гозатраты. Цель изобретения - снижение энергозатрат. Поставленная цель достигается тем, что в устройстве управления движением экзоскелетона, содержащем связанные между собой блок Датчиков и блок регистрации усилий, и приводы, введены последовательно соединенные фильтр, блок вычисления шар нирных моментов и блок стабилизации, подключенный к приводам, и соединенные между собой интегратор, связанный с блоком вычисления шарнирных моментов, и блок сравнения; при этом первый выход блока регистрации усилий подключен к фильтру, а второй выход - к входу блока сравнения, вып ход которого связан с фильтром. На чертеже изображена блок-схема устройства. Устройство содержит блок 1 регистрации усилий, фильтр 2., блок 3 вычисления шарнирных моментов, интегратор k, блок 5 сравнения, блок 6 стабилизации, приводы 7 и блок датчиков 8. Устройство работает следующим образом. э Блок 1 регистрирует кинематику и опорные -усилия при выполнении движения экзоскелетона. Исходные пока- . затели движения - координаты - регистрируются устройством, куда пред-j варительно вводятся данные о весе. размерах и моментах инерции звеньев экзоскелетона. В устройстве экспериментальные данные, определенные в ди кретные моменть) времени, пропускают ся через фильтр 2, где производится фильтрация ошибок измерения и числен ное вычисление производных обобщенны координат: В блоке 3 вычисления шар нирных моментов решается прямая зада ча динамики: вычисляются шарнирные м менты, реализующие данное, движение, С целью контроля точности аппроксимации синтезированных моментов, в интеграторе А решается обратная задача динамики: численное интегрирование системы дифференциальных уравнений, В блоке 5 сравнения обобщенные координаты, полученные при решении обратной задачи, сравниваются с заданным движением и формируется абсолютная погрешность рассогласования. Введенная обратная связь позволяет снизить ошибки в точности задания исходного движения и уменьшить вычислительные погрешности. Синтезированные шарнирные моменты поступают в блок 6 стабилизации, где решаются задачи оптимальности и стабилизации движений. Результаты полученные в этом блоке, выводятся на дисплей,, определяются скоростей, ускорений и усилий, которые возникают при выполнении движени экзоскелетоном. При работе с экзоскелетоном выходы блока 6 стабилиза ции подключаются через преобразовательное устройство к силовым приводам 7 экзоскелетона, и описанная процедура повторяется для контроля за правильностью выполнения движения. Устройство позволяет с большой точностью синтезировать шарнирные моменты для экзоскелетонов, а также дает возможность для изучения и анализа всевозможных движений человека, позволяет в реальном масштабе времени управлять движением экзоскелетонов. Наличие блока оптимизации обеспечивает экономию энергии приводов. Формула изобретения Устройство у.правления движением экзоскелетона, содержащее связанные между собой блок датчиков и блок регистрации усилий, и приводы, отличающееся тем, что, с целью снижения энергозатрат, в устройство введены последовательно соединенные фильтр, блок вычисления шарнирных моментов и блок стабилизации, подключенный к приводам, и соединенные между собой интегратор, связанный с блоком вычисления шарнирных моментов, и блок сравнения; при этом первый выход блока регистрации усилий подключен к фильтру, а второй выход - к входу блока сравнения, выход которого связан с фильтром. Источники информации, принятые во внимание при экспертизе 1. Проскуряков В.Б, и др. Принципы построения и действия опорно-двигательного аппарата биотехнической системы типа экзоскелетон. механика, Рига, Наука, 1975, с, 615-619. 
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| ЛАЗЕРНАЯ СИСТЕМА КОНТРОЛЯ МИКРОВОЛНОВЫХ СИСТЕМ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2047186C1 |
| СИСТЕМА ВИЗИРОВАНИЯ ОБЪЕКТА | 2006 |
|
RU2315255C1 |
| УСТРОЙСТВО ТРАЕКТОРНОГО, ОПТИМАЛЬНОГО ПО БЫСТРОДЕЙСТВИЮ УПРАВЛЕНИЯ МАНИПУЛЯЦИОННЫМ РОБОТОМ | 2000 |
|
RU2199775C2 |
| Устройство для измерения линейных и угловых вибраций | 1990 |
|
SU1781557A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074394C1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
