(54) ЭЛЕКТРОННЫЕ КОНВЕЙЕРНЫЕ ВЕСЫ С НЕПРЕРЫВНЫМ КОНТРОЛЕМ ТОЧНОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронные конвейерные весы | 1976 |
|
SU611120A1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Конвейерные весы | 1987 |
|
SU1553844A1 |
| Конвейерные весы | 1989 |
|
SU1739208A1 |
| Электронные конвейерные весы | 1977 |
|
SU684319A1 |
| Конвейерные весы | 1981 |
|
SU974136A1 |
| ЭЛЕКТРОННЫЕ КОНВЕЙЕРНЫЕ ВЕСЫ С ДИСКРЕТНЫМВЫХОДОМ | 1968 |
|
SU210411A1 |
| Способ управления регулируемым приводом конвейерного тракта роторных комплексов | 1985 |
|
SU1493569A1 |
| Конвейерные весы | 1981 |
|
SU979879A1 |
| Способ поверки конвейерных весов | 1989 |
|
SU1663445A1 |
Изобретение относится к весоизмерительной технике и предназначено для непрерывного взвешивания груза, транспортируемого ленточными конвейерами,.
Известны автоматические конвейерные весы, содержащие грузоприемную раму, датчики веса и скорости, блок перемножения, блок установки нуля, блок обработки сигналов и блок регистрации 1.
Недостаток известных устройств отсутствие контроля точности работы весов.
Наиболее близким по технической сущности к изобретению являются электронные конвейерные весы с непрерывным контролем точности, содержащие первый и второй датчики веса, подк.пюченные через коммутатор к первому входу разраиающей схемы, ко второму входу которой подключен датчик скорости, а к выходу подключен итоговый счетчик, а также реверсивный счетчик и сигнализатор заполнения 2.
Недостатком весов такого типа является наличие методической , связанной с тем, что датчики веса разнесены друг относительно друга.
Цель изобретения - повышение точности контроля работы конвейерных весов.
Для обеспечения поставленной цели в конвейерные весы введены программное устройство и три дополнительные разрешающие схемы, причем выходы первой и второй дополнительных разрешающих схем соответственно подключены
10 к суммирующим и вычитающим входам реверсивного счетчика, первые входы соответственно подключены к выходам первого и второго датчика веса, а вторые входы соответственно подклю15чены к первому и второму выходам программного устройства, вход которого подключен к датчику скорости, а третий выход соединен с первым входом третьей дополнительной разрешаю20щей схемы, второй вход которой соединен с выходом реверсивного счетчика, а выход подключен к сигнализатору заполнения.
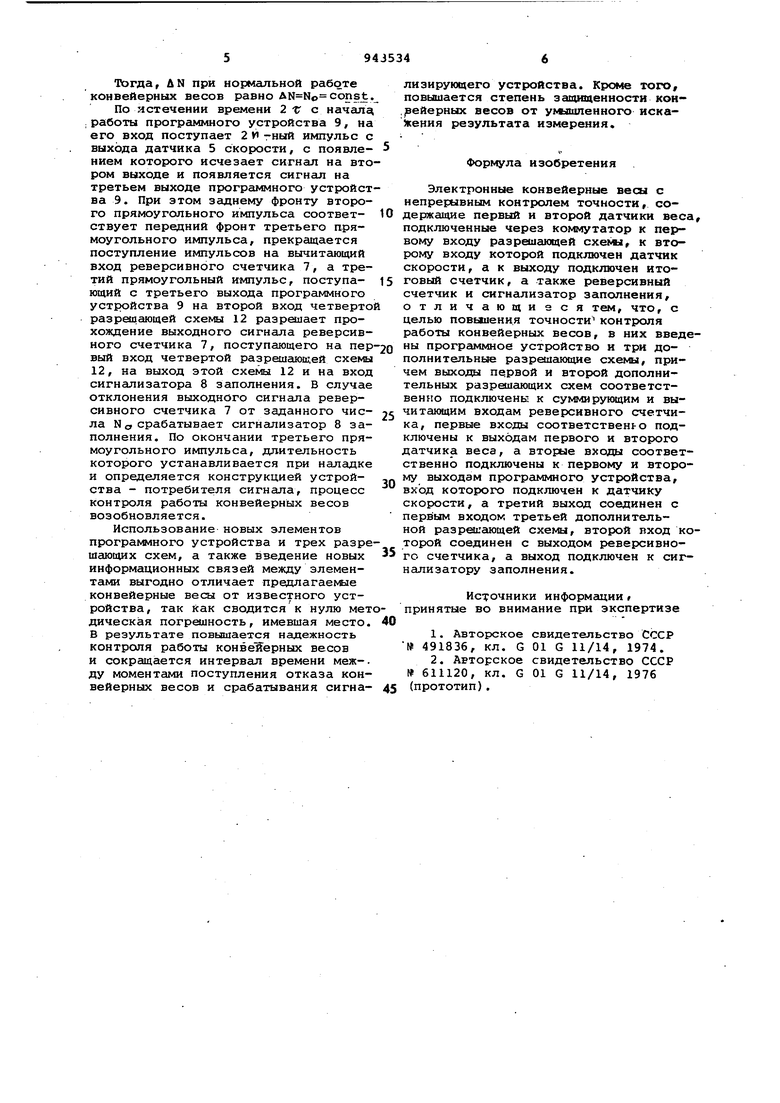
На чертеже представлена схема конвейерных весов.
Конвейерные весы содержат первый датчик 1 веса, второй датчик 2 веса, коммутатор 3, первую разрешгиощую схему 4, датчик 5 скорости, итоговый
30 счетчик 6, реверсивный счетчик 7, сигнализатор 8, программное устройство 9, вторую разрешающую схему 10 третью разрииающую схему М и четвер тую разролающую схему 12. Электронные конвейерные весы ра ботамт следующим образом. . исходные сигналы датчиков 1 и 2 веса, частота которых пропорциональна погонной нагрузке на .весовом участке конвейера, поступают через коглмутатор 3 на первую разрешающую схему 4, управляемую поступающими с задатчика 5 скорости прямоугольными импульсами постоянной длительности с частотой, пропорциональной скорости движения ленты конвейера. Сигналы от датчиков 1 и 2 веса проходят на выход первой разрешающей схемы 4 только при наличии на втором входе первой разрешающей схемы 4 сигнала с датчика 5 скорости. Выходной сигнал с первой разрешающей схемы 4 поступает на вход итогового счетчика 6, который фиксирует количество импульсов/ пропорциональное весу груза, перемещенного конвейером Сигнал с датчика 5 скорости поступает на вход программного устройства 9 и осуществляет его запуск. При этом, на первом выходе программного устройства 9 формируется прямоугольный импульс, длительность которого равна периодам частоты датчика 5 скорости, конструкция которого предусматривает равенство периодов частоты датчика 5 скорости интервалу времени, необходимому для перемеще ния ленты конвейера от первого датчика 1 веса ко второму датчику 2 веса. Так, например, если конструкция датчика 5 скорости включает в-себя контактный ролик и устройство, вырабатывающее электрический импульс при каждом обороте контактного ролика, то диаметр этого ролика подби рают таким, чтобы расстояние между датчиками 1 и 2 веса с учетом стрелы провеса ленты конвейера быпо кратным длине окружности контактного ролика п раз. В этом случае расстояние С между первым и вторым датчиками 1 и 2 вес определяется равенством . e-MTjjV CV, скорость ленты конвейер ТГ-иТо - интервал времени, необходимый для перемещения ленты конвейера от первого датчика 1 веса ко второму датчику веса 2. Первый прямоугольный импульс дли тельностьюХс первого выхода программного устройства 9 поступает на второй вход второй разрешающей схем 10 и разрешает прохождение на ее вы ход и суммируюйий вход реверсивного счетчика 7 частотного сигнала, который непрерывно поступает с выхода датчика 1 веса на первый вход второй, разрешающей схемы 10. При этом в ре- версивном счетчике 7 накапливается число Hi импульсов, равное N, a)dt-No- К Jq,, (1)аь где f - частота выходного си.гнала первого датчика 1 веса; (J - погонная нагрузка на участi;e взвешивания первого датчика 1 веса; коэффициент пропорциональности частоты f ,| погонной нагрузке q. Np - контрольное число, предварительно записанное в реверсивном счетчике 7, которое может быть равным нулю. По окончанию времени -ъ , на вход программного устройства 9 с выхода датчика 5 скорости поступает п-ный импульс, который вызывает исчезновение сигнала на первом выходе и появление второго прямоугольного импульса длительностьют на втором выходе программного устройства 9. При этом заднему фронту первого прямоугольного импульса соответствует передний фронт второго прямоугольного импульса, прекргццается поступление импульсов с выхода первого датчика 1 веса на суммирующий вход реверсивного счетчика 7, а второй прямоугольный импульс, поступающий со второго ыхода программного устройства 9 на второй вход третьей разрешающей схеы 11, -разрешает прохождение частотного сигнала, поступающего со второго датчика 2 веса на первый вход третьей разрешающей схемы 11, на выход этой схемы 11 и вычитающий вход реверсивного счетчика 7, на который за интервал времени от Т до поступает N число импульсов, равное Ni--jVt): --KiJ aW 3t-Ki; V,(, J т т где ±2 - частота выходного сигнала второго датчика 2 веса; i.- погонная нагрузка на участке взвешивания второго датчика веса; Kj, коэффициент пропорциональности частоты погонной нагрузке q. На основании свойства определенного интервала It Jc tt-r;at--|().(-t)clt количество импульсов &N, содержащихся в реверсивном счетчике 7 по истечении времени 2 Т, равно N--N,-Ni No tKi- i)JtVi(tWt , При настройке конвейерных весов достигается условие К: - К 0. Тогда, Д N при нормальной работе конвейерньох весов равно const. По истечении времени 2 т с началу ;работы программного устройства 9, на его вход поступает 2 я гный импульс с выхода датчика 5 скорости, с появлением которого исчезает сигнал на вто ром выходе и появляется сигнал на третьем выходе программного устройст ва 9. При этом заднему фронту второго прямоугольного импульса соответствует передний фронт третьего прямоугольного импульса, прекращается поступление импульсов на вычитающий вход реверсивного счетчика 7, а третий прямоугольный импульс, поступа- ющий с третьего выхода программного устройства 9 на второй вход четверто разрешающей схемы 12 раэраиает прохождение выходного сигнала реверсивного счетчика 7, поступающего на пер вый вход четвертой разрешающей схемы 12, на выход этой схемы 12 и на вход сигнализатора 8 заполнения. В случае отклонения выходного сигнала реверсивного счетчика 7 от заданного числа N о срабатывает сигнализатор 8 заполнения. По окончании третьего прямоугольного импульса, длительность которого устанавливается при наладке и определяется конструкцией устройства - потребителя сигнала, процесс контроля работы конвейерных весов возобновляется. Использование новых элементов программного устройства и трех разре шающих схем, а также введение новых информационных связей между элементами выгодно отличает предлагаемые конвейерные весы от известного устройства, так как сводитсяк нулю мет дическая погрешность, имевшая место. В результате повышается надежность контроля работы конвейерных весов и сокращается интервал времени меж-. ду моментами поступления отказа конвейерных весов и срабатывания сигнализирующего устройства. Кроме того повышается степень защищенности кои ейерных весов от умдцленного искажения результата измерения. Формула изобретения Электронные конвейерные весы с непрерывным контролем точности, содержащие первый и второй датчики веса, подключенные через коммутатор к первому входу разрешающей cxeNU, к второму входу которой подключен датчик скорости, а к выходу подключен итоговый счетчик, а также реверсивный счетчик и сигнализатор заполнения, отличающи эся тем, что, с целью повыиения точности контроля работы конвейерных весов, в них введены программное устройство и три дополнительные разрешгиощие схемы, причем выходы первой и второй дополнительных разрешающих схем соответственно подключены к суммирующим и вычитающим входам реверсивного счетчика, первые входы соответствен -о подключены к выходам первого и второго датчика веса, а вторые входы соответственно подключены к первому и второму выходам программного устройства, вход которого подключен к датчику скорости, а третий выход соединен с перв1ым входом третьей дополнительной разрвхгающей схемы, второй вход которой соединен с выходом реверсивного счетчика, а выход подключен к сигнализатору заполнения. Источники информации « принятые во внимание при экспертизе 1.Авторюкое свидетельство СССР 491836, кл. G 01 G 11/14, 1974. 2.Авторское свидетельство СССР № 611120, кл. G 01 G 11/14, 1976 (прототип).
j
