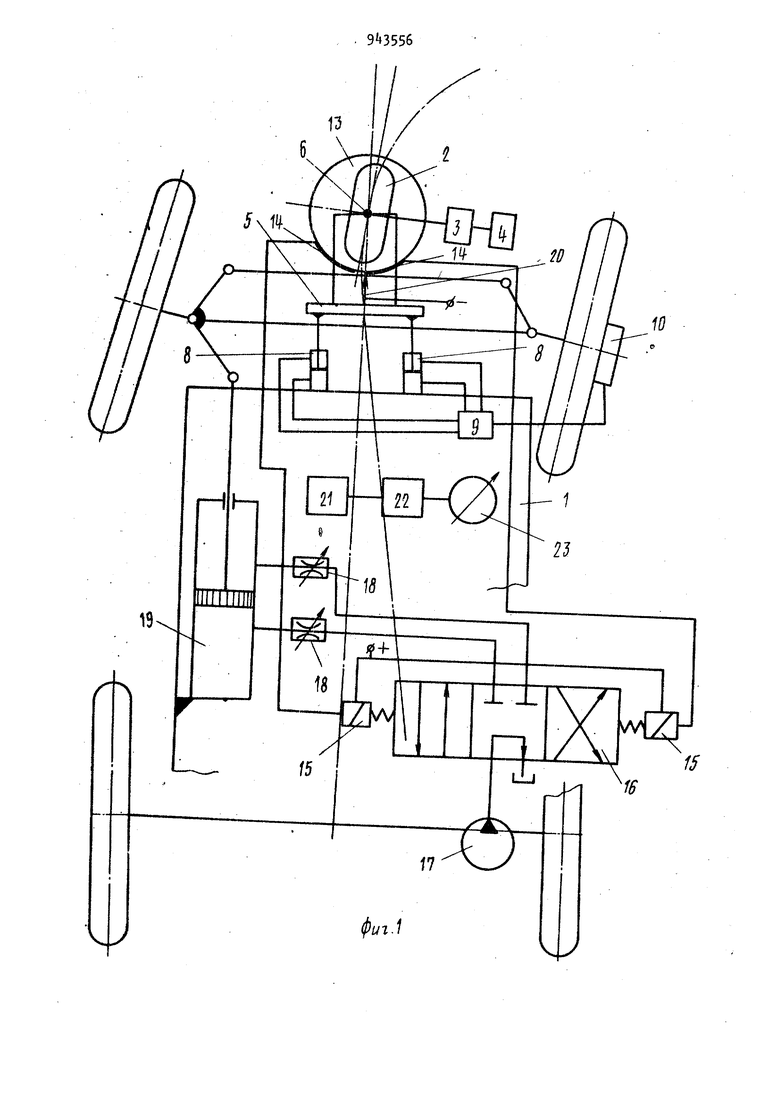
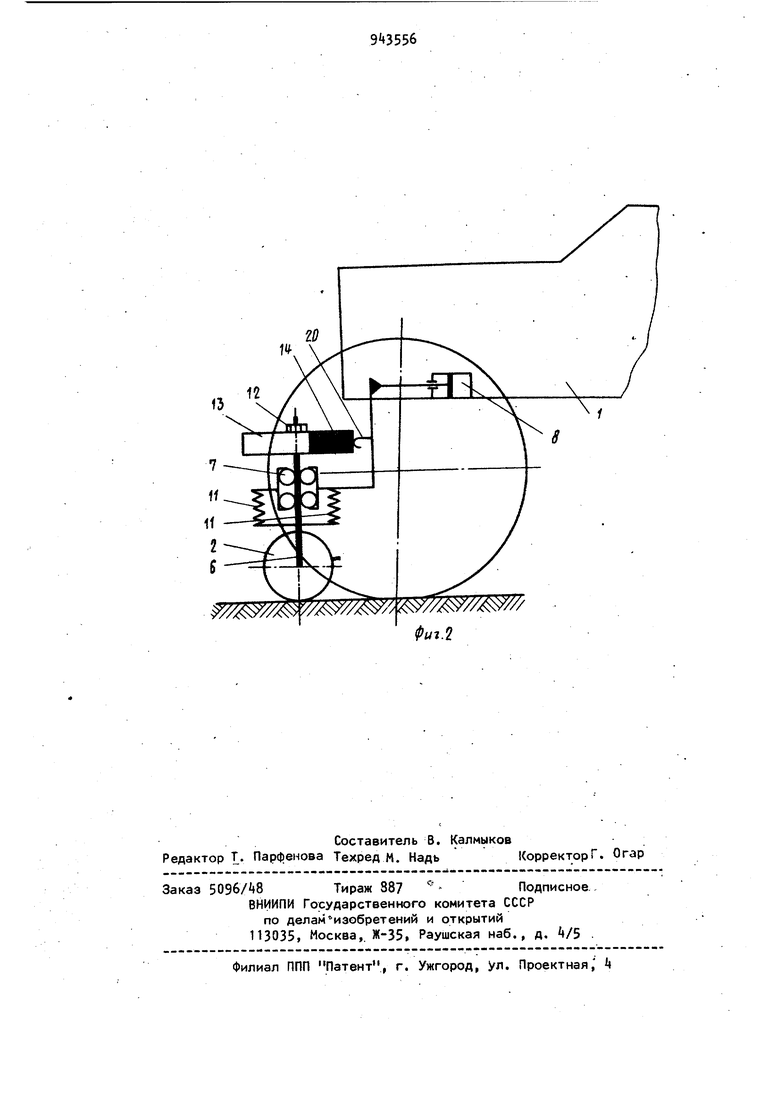
(5) УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ХАРАКТЕРИСТИК ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА Изобретение относится к испытатель ным устройствам для исследования характеристик движения транспортного средства, в частности для оценки его управляемости и устойчивости. Известно устройство для исследования характеристик движения транспортного средства, содержащее датчик скорости движения, интегрирующий блок , вход которого соединен с выходом измерителей характеристик движения, а выход - с регистрирующим прибором, направляющее колесо, установленное на вертикальной оси, расположенной а корпусе в подшипниках, соединенное через исполнительный блок с блоком задания траектории движения, электрогидравлическую систему управления, со стоящую из электрогидравлического распределителя рулевого управления, гидравлически соединенного с гидронасосом, с гидроВаком и с исполнительным гидроцилиндром, кинематически связанным с рулевой трапецией тран- спортного средства ГО. Недостатком известного устройства является неточность слежения транспортным средством заданной траектории, вследствии несоблюдения условия идеального копирования траектории, заключающегося в том, что продольная плоскость симметрии транспортного средства должна быть постоянно касательной к траектории и, следовательно, курсовой угол равным нулю. Кроме того, -наличие в механизме управления поворотом колес двухплечего рычага создает нежелательные боковые усилия на направляющее колесо, что при определеньй 1х условиях (неровности дороги, большие скорости движения) может затруднить как получение необходимой траектории движения, так и ее отслеживание. Цель изобретения - повышение достоверност1 оценки характеристик движения транспортного средства при различных траекториях движения. Указанная цель достигается тем, что устройство снабжено электрическим датчиком угла поворота направляющего колеса, расположенным на оси направляющего колеса, и электрически связанным с электрогидравлическим распределителем, причем ось упомянутого направляющего колеса установлена в продольной плоскости симметрии траиспортног о средства, а также тем, что устройство снабжено дополнительным исполнительным блоком и гидроцилиндром, кинематически связанным с корпусом направляющего колеса и с рамой транспортного средства, и гидравлически соединенного .с упомянутым допол нительным исполнительным блоком, связанным с датчиком скорости движения. На фиг. 1 изображена схема устройства; на фиг. 2 связь направляющего колеса с транспортным средством, Устройство для исследования характеристик движения транспортного средства 1 содержит направляющее колесо 2 вертикальная ось поворота которого лежит в продольной плоскости симметрии транспортного средства. Колесо 2 через исполнительный блок 3 соединено с блоком задания траекторий и имеет возможность поворота относительно корпуса 5 вокруг вертикальной оси 6, связанной с корпусом посредством под.шипников 7. Корпус 5 связан с рамой транспортного средства 1 посредством гид,роцилиндров 8, соединенных через дополнительный исполнительный блок 9 с датчиком 10 скорости движения транспортного средства. Направляющее колесо 2 постоянно прижато к дороге посредством пружины 11, а на его вертикальной оси 6 посредством гайки 12 закреплен электрический датчик угла поворота 13 выполненный в виде токонепроводящего цилиндра, на боковые поверхности которого наклеены две металлические пластины , связанные электриврёски с электромагнитами 15, управляющими положением электрогидрав лического распределителя 16, входящего в электрогидравлическую систему управления транспортным средством, содержащую гидронасос 17, дроссели переменного сопротивления 18 и исполнительный гидроцилиндр 19, шток которого связан с рулевой трапецией транспортного средства. Корпус 5 посредством подпружиненного металлического контакта 20, подключенного к клемме Минус аккумуляторной батареи, связан с токонепроводящим цилиндром, который посредством гайки 12 так закрепляется на оси 6, чтобы при совпадении продольных плоскостей симметрии направляющего колеса 2 и транспортно- госредства 1 контакт 20 находился между пластинами k, т,е, чтобы электрическая цепь механизма слежения была разомкнута. Показания соответствующих датчикое 21, оценивающих характеристики движения транспортного средства, например курсовой угол, боковые силы и т.д., подаются через интегрирующий блок 22 на регистрирующий при,ор 23. Устройство работает следующим образом. При движении транспортного средства вдоль прямолинейного участка траектории продольные плоскости симметрии направляющего колеса и транспортного средства совпадают, контакт 20 находится между пластинами Н и электрическая цепь механизма слежения разомкнута. Электрогидравлический распределитель 16 под действием пружин находится в нейтральном положении, и масло от гидронасоса 17 идет на слив, т.е. управляемые колеса транспортного средства остаются в нейтральном положении. При задании криволинейной траектории блоком k, т.е. при повороте направляющего колеса 2, контакт 20 замыкается с одной из пластин 1, При этом замыкается цепь соответствующего электромагнита 15, который притягивает к себе золотник электрогидравлического распределителя 16, и масло от гидронасоса 17 подается в соответствующую полость исполнительного гидроцилиндра 19, шток которого через рулевую трапецию поворачивает управляемые колеса транспортного средства. Поворот колес происходит до тех пор, пока совпадут продольные плоскости симметрии направляющего колеса и транспортного средства, т.е. контакт 20 установится между пластинами }Ц. Направление поворота колес определяется тем, какая из пластин I замыкается с контактом 20, а скорость поророта колес регулируется дросселями переменного сопротивления 18. Расстояние между пластинами определяет зону нечувствительности устройства слежения, а ширина пластин 1 должна быть больше поверхности контакта с ними контакта 20, что исключит влияние вертикальных колебаний транспор ного средства на работу устройства слежения. Для исключения влияния запаздывания срабатывания механизма управлени колесами транспортного средства на точность слежения направляющее колесо 2 перемещается с корпусом 5 впере передней оси транспортного средства. Это осуществляется автоматически от датчика скорости 10 через дополнительный исполнительный блок 9 и гидроцилиндры 8. Расстояние .выноса вертикальной оси направляющего колеса от передней оси транспортного средст ва равно произведению скорости движе ния на время запаздывания срабатывания механизма управления колесами, а сигнал, пропорциональный ему, формируется в дополнительном исполнител ном блоке 9. Характеристики движения транспортного средства, например углы поворота колес, курсовой угол, бо ковые силы, смещения транспортного средства и т.д. оцениваются соответствующими датчиками 21 и через интег рирующий блок 22 выводятся на регист рирующей прибор 23. Таким образом, предлагаемое устройство за счет отличительных признаков; позволяет повысить точность слежения транспортного средства по заданной траектории и достоверно оце нить характеристики его движения при различных типах маневров. Формула изобретения 1. Устройство для исследования характеристик движения транспортного средства, содержащее датчик скорости движения, интегрирующий блок, вход которого соединен с выходом измерителей ;характеристйк движения, а выход - с регистрирующим прибором, направляющее колесо, установленное на вертикальной оси, расположенной в корпусе в подшипниках, соединенное через исполнительный -блок с блоком задания траектории движения, электрогидравлическую систему управления, состоящую из электрогидравлического распределителя рулевого управления, гидравлически соединенного с гидронасосом, гидробаком и исполнительным гидроцилиндром, кинематически связанным с рулевой трапецией транспортного средства, отличающееся тем, что, с целью повышения достоверности оценки характеристикдвижения транспортного средства при различных траекториях движения, устройство снабжено электрическим датчиком угла |поворота направляющего колеса, расположенным на оси направляющего колеса и электрически связанным с электрогидравлическим распределителем, причем ось упомянутого направляющего колеса установлена в продольной плоскости симметрии транспортного средства. 2. Устройство по п. 1, о т л ичающееся тем, что, оно снабжено дополнительным исполнительным блоком и гидроцилиндром, кинематически связанным с корпусом направляющ го колеса и рамой транспортного средства и гидравлически соединенным с упомянутым исполнительным дсяюлнительным блоком, связанным с датчиком скорости движения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР , кл. G 01 М 17/06, 1973 {прототип).,
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический рулевой привод шарнирно-сочлененного транспортного средства с передними управляемыми колесами | 1978 |
|
SU918157A1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2157774C2 |
| Транспортное средство с автоматической системой рулевого управления | 1979 |
|
SU854296A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛИННОБАЗНОГО АВТОПОЕЗДА | 2015 |
|
RU2604376C1 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2138418C1 |
| Транспортное средство | 1980 |
|
SU935325A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Гидравлическая система управления поворотом гусеничной машины | 1983 |
|
SU1134455A1 |