(5) ТРАНСПОРТНОЕ СРЕДСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| Колесное транспортное средство | 1987 |
|
SU1418089A1 |
| Колесное транспортное средство | 1980 |
|
SU893606A1 |
| Колесное транспортное средство | 1987 |
|
SU1418090A1 |
| Механизм поворота транспортного средства | 1981 |
|
SU992255A1 |
| Колесное транспортное средство | 1981 |
|
SU958150A1 |
| Колесное транспортное средство | 1981 |
|
SU948705A1 |
| Колесное транспортное средство | 1981 |
|
SU998152A2 |
| Колесное транспортное средство | 1981 |
|
SU1009826A1 |
| Устройство поворота транспортного средства | 1990 |
|
SU1733280A1 |
| Колесное транспортное средство | 1981 |
|
SU948704A1 |
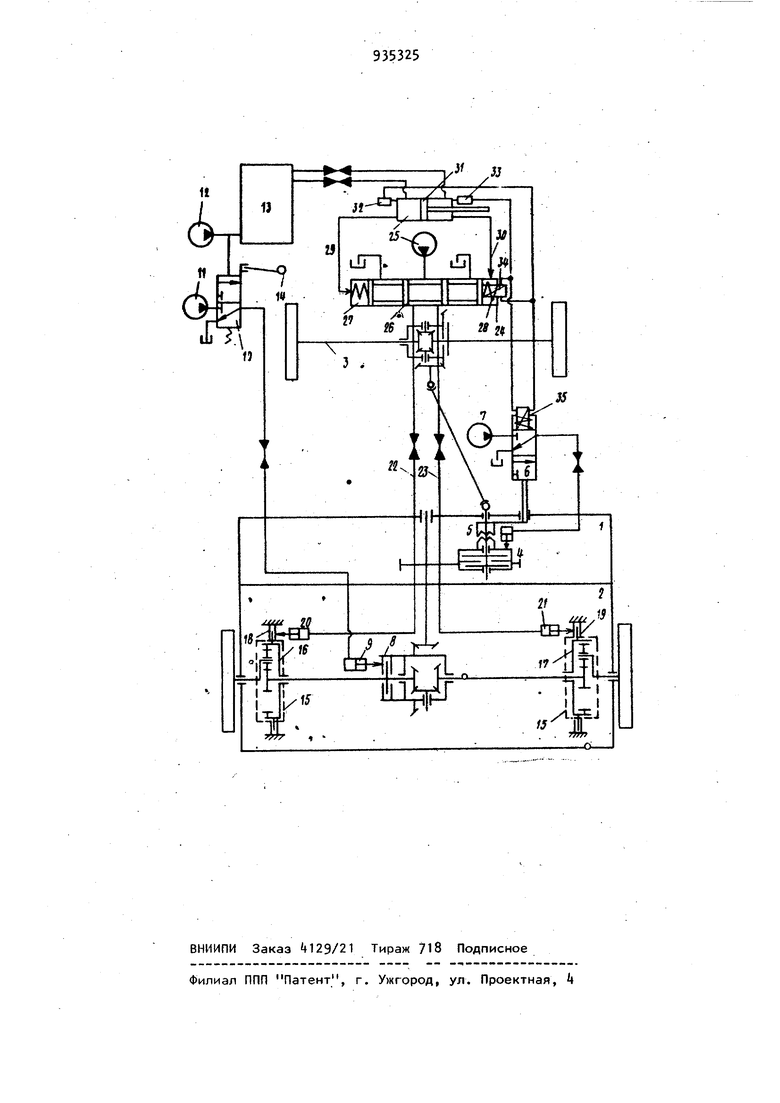
Изобретение относится к транспорт ному машинострбению, а именно к колес ным транспортным средствам, преимущес венно тракторам. Известно транспортное средство, содержащее основной ведущий мост с блокируемым дифференциалом, механизм блокировки которого выполнен в виде фрикционной муфты, кинематически связанной с гидроцилиндром, соединенным через гидравлически управляемый распределитель с гидронасосом, дополнительный ведущий мост, выходной вал которого кинематически связан через кулачковую муфту и механизм свободного хода с гидроцилиндром управления с выходным валом основного ведущего моста бортовые планетарные механизмы оснорного ведущего моста, централь ные шестерни которых:связаны с ремой транспортного средства посредством фрикционных му()т, силовые цилиндры которых гидравлически .соединены через электрогидравлически управляемый распределитель отключения бортовых планетарных механизмов с гидронасосом и гидробаком, причем линии управления упомянутого распределителя соединены с полостями исполнительного цилиндра рулевого управления, гидравлически . соединенного через гидроусилитель рулевого управления с гидронасосом рулевого управления, напорная гидролиния которого соединена с линией управления гидравлически управляемого распределителя ciy. Недостатком известного транспортного средства является то, что оно не обеспечивает получение минимально возможных радиусов поворота при такой схеме привода колес. Как известно, минимальный радиус поворота получается, если передние управляемые колеса работают в ведущем режиме. У известного транспортного средства передние: колеса на повороте не участвуют в тяговом режиме, поскольку обгонная муфта их отключает. Маневр с минимально возможным радиусом транспортное средство (например, трактор) осуществляет, как правило, с небольшой или нулевой нагрузкой на крюке. В этом слу чае тяги одного моста достаточно. Цель изобретения - улучшение управляемости транспортного средства путем обеспечения возможности получения минимального радиуса поворота за счет отключения колес основного ведущего моста Указанная цель достигается тем, что транспортное средство снабжено датчиком включения дополнительного ведущего моста и двумя концевыми датчиками перемещения штока, установленными на исполнительном цилиндре рулевого управления и элект.рически соединенными с электрогйдраапически управляемым распределителем отключения бор товых планетарных механизмов и упомянутым датчиком включения дополнительного ведущего моста, причем последний гидравлически соединен с гидронасосом гидробаком и гидроцилиндром управления механизма свободного хода и кинематически связан с кулачковой муфтой. На чертеже изображена гидромеханическая схема транспортного средства. Транспортное средство содержит раму 1 , основной 2 и дополнител§ ный 3 ведущие мосты, которые связаны между собой механизмом свободного хода k, выполненнымв виде обгонной и муфты. Обгонная муфта посредством кулачковой муфты 5связана через датчик вклю чения дополнительного ведущего моста, выполненного в виде золотника 6, с гидронасосом 7. Основной ведущий мост содержит механизм блокировки диф ференциала, выполненный в виде фрикционной муфты 8, кинематически связан ной с гидроцилиндром 9 который через гидравлически управляемый распределитель 10 соединяется с гидронасосом 11. Распределитель 10 также связан с гидронасосом рулевого управления 12 гидроусилителя рулевого управления 13 и имеет ручное управление 1. Основной ведущий мост содержит бортовые планетарные механизмы 15, коронные шестерни 16 и 17 которых посредством фрикционных муфт 18 и 19 связаны с рамой 1 машины. Фрикционные муфты 18 и 19 управляются силовыми цилиндрами 20 и 21, которые гидролиниями 22 и 23 через злектрогидравлически управ ляемый распределитель отключения бортовых планетарных механизмов связаны с гидронасосом 25. Распределитель 2 содержит золотник 2б поджатый с торцов пружинами 27 и 28. Распределитель 2 гидролиниями 29 и 30 связан с полостями исполнительного цилиндра 31 рулевого управления, который имеет концевые датчики перемещения штока 32 и 33, связанные с электромагнитом З распределителя отключения бортовых планета рных механизмов 2k и электромагнитом 35 датчика включения дополнительного моста 6, Транспортное средство работает следующим образом. При прямолинейном движении транспортного средства и буксовании колес основного моста выше допустимого обгонная муфта подключает дополнительный мост в тяговый режим. При этом кулачковая муфта 5, размыкаясь, перемещает золотник 6 и сообщает гидронасос 7 с силовым цилиндром обгонной муфты. При этом давления, развиваемого гидронасосом 12, не достаточно, чтобы переместить распределитель 10, и блокировка дифференциала отключена. При необходимости она может быть включена принудительно рычагом Н. При прямолинейном движении давления в полостях исполнительного цилиндра 31 равны, вследствие чего золотник 2б распределителя 2 находится в среднем положении и сообщает силовые цилиндры 20 и 21 фрикционных муфт 18 и 19 с гидронасосом 25. В этом случае крутящий момент подводится к обеим Колесам основного ведущего моста 2. При движении на повороте (например, влево с промежуточным углом поворота) давление в одной полости исполнительного цилиндра 31возрастает и, если оно превышает противодавление в противоположной полости и усилие от пружины 28, золотник 26, перемещаясь вправо, сообщает силовой цилиндр 20 фрикционной муфты 13 со сливом - крутящий момент к левому внутреннему колесу основного ведущего моста не подводится. Одновременно возрастает давление гидронасоса 12, перемещаясь, распределитель 10 сообщает гидроцилиндр 9 фр 1кчионной муфты 8 блокировки дифференциала с гидронасо- . сом 11 - дифференциал основного ведущего моста заблокирован и весь крутящий момент подводится к правому (наружному) колесу. Одновременно вследствие рассогласования угловых скоростей колес переднего и заднего мосТО8 обгонная муфта механизма свободного хода k отключает дополнительный ведущий мост 3 от основного моста 2, При этом условие поворота улучшается. В данном случае ток в обмотки электромагнитов З и 35 не поступает.
При повороте управляемых колес на максимальный угол срабатывает концевой датчик 33и в обмотки электромагнитов 3 и 35 поступает ток, вследствие чего золотник 6, перемещаясь в крайнее положение, сообщает силовой цилиндр муфты свободного хода с гидронасосом 7. Дополнительный ведущий мос 3 подключается в тяговый режим. Одновременно золотник 26, перемещаясь, сообщает силовые цилиндры 20 и 21 со сливом, вследствие этого крутящий момент не подводится к колесам основного ведущего моста.
При выходе из поворота сначала концевой датчик 33 обесточивает обмотки электромагнитов З и 35. Золотники 6 и 26 возвращаются в исходное положение - силовой цилиндр 21 сообщается с гидронасосом 25 и подключает правое (наружное) колесо основного ведущего моста в тяговый режим, а колеса дополнительного ведущего моста отключаются от тягового режима. На даль нейшем этапе выхода из поворота давление в соответствующей полости исполнительного цилиндра 31 уменьшается. Под действием сжатой пружины 28 золотник 26 возвращается в исходное положение. В результате этого крутящий момент подводится к обоим колесам основного ведущего моста. Одновременно снижается давление гидронасоса 12, распределитель 10 сообщает блокировку дифференци ала основного моста со сливом - дифференциал разблокирован Аналогично осуществляется поворот вправо.
Таким образом, при повороте управляемых колес на максимальный угол происходит автоматическое отключение колес основного ведущего моста и подключение в тяговый режим колес управляемого дополнительного моста. Это позволяет получить минимальнь|й радиус поворота транспортного средства.
Формула изобретения
. Транспортное средство, содержащее основной ведущий мост с блокируемым
дифференциалом, механизм блокировки которого выполнен в виде фрикционной муфты, кинематически связанной с гидроцилиндром, соединенным через гидралически управляемый распределитель с гидронасосом, дополнительный ведущий мост, выходной вал которого кинематически связан через кулачковую муфту и механизм свободного хода с гидроцилиндром управления с выходным валом основного ведущего моста, бортовые планетарные механизмы основного ведущего моста, центральные шес терни которых связаны с рамой транспортного средства посредством фрикционных муфт, силовые цилиндры которых гидравлически соединены через электрогидравлически управляемый распределитель отключения.бортовых планетарных механизмоа с гидронасосом и гидробаком, причем линии управления упомянутого распределителя соединены с полостями исполнительного цилиндра рулевого управления, гидравлически соединенного через гидроусилитель рулевого управления с гидронасосом рулевого управления, напорная гидролиния которого соединена с линией управления гидравлически управляемого распределителя, отличающееся тем, что, с целью улу 1шения управляемости транспортного средства путем обеспечения возможности получения минимального радиуса поворота за счет отключения колес основного ведущего моста, оно снабжено датчиком включения дополнительного ведущего моста и двумя концевыми датчиками перемещения штока, установленными на исполнительном цилиндре рулевого управления и электрически соединенными с электрогидравлически управляемым распределителем отключения бортовых планетарных механизмов и упомянутым датчиком включения дополнительного ведущего моста, причем последний гидравлически соединен с гидронасосом, гидробаком и гидроцилиндром управления механизма свободного хода и кинематически связан с кулачковой муфтой.
Источники информации, принятые во внимание при экспертизе
