(54) ОБРАТИМАЯ СЛЕДЯЩАЯ СИСТЕ14А
| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимая следящая система | 1983 |
|
SU1176301A1 |
| Обратимая следящая система | 1979 |
|
SU943637A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Обратимая следящая система | 1982 |
|
SU1029137A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| СЛЕДЯЩАЯ СИСТЕМА С ЦИФРОВЫМ ОТСЧЕТОМ | 1972 |
|
SU419730A1 |
| Следящая система | 1978 |
|
SU744432A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
Изобретение относится к автоматическому управлению и может быть использовано при создании дистанционно управляемых копирующих манипуляторов с активным отражением усилия.
Известна обратимая следящая система, содержащая на задающей стороне последовательно соединенные первый усилитель и первый двигатель, на валу которого установлены датчики момента, положения, скорости вращения ваша и ускорения вращения вала, а на исполнительной стороне - последова- . тельно соединенные второй усилитель и второй двигатель, на валукоторого установлены датчики момента, положения, скорости вращения вала и ускорения вращения вала, а также два нелинейных блока (ij .
Однако данная система является сложной и имеет низкую точность.
Наиболее близким техническим ре1ааениемок изобретению является система, содержащая нелинейный элемент и на задающей стороне - последовательно соединенные первый усилитель и первый двигатель, вал которого через первый редуктор связан с первым датчиком угла и с первым датчиком скорости, на исполнительной стороне
последовательно соединенные второй усилитель и второй двигатель, вал которого через второй редуктор связан со вторым датчиком угла и с вторым датчиком скорости, причем выходы первого и второго датчика скорости подключены соответственно к первому и второму -входам первого и второго усилителя,третьи входы которых соединены с выходом сумматора, первым и вторым входами подключенного к выходу первого и второго датчика угла соответственно 2.
Недостатком этой системы является сложность ее конструкции, обусловленная необходимостью применения датчиков момента.
Цель изобретения - упрощение системы.
Цель достигается тем, что в системе выход сумматора через нелинейный элемент соединен с четвертыми входами первого и второго усилителей.
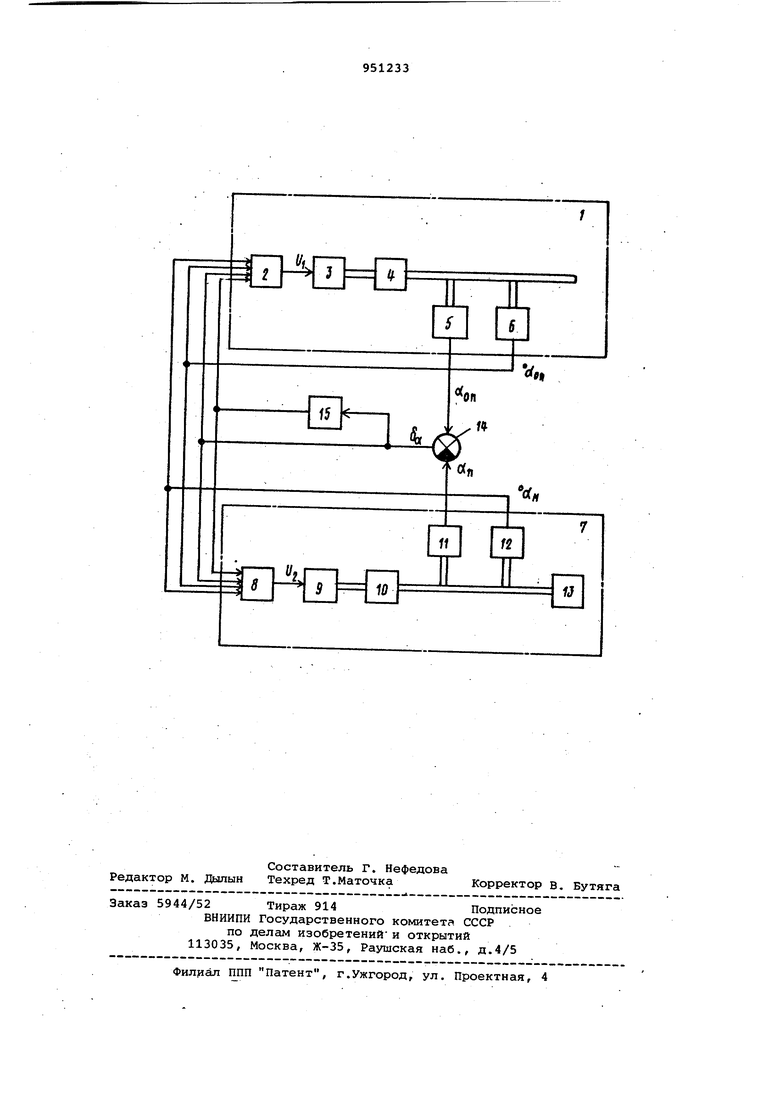
На чертеже представлена функциональная схема.
Схема содержит задающую сторону 1, первый усилитель 2, первый двигатель 3, первый редуктор 4, первый датчик 5 угла, первый датчик 6 ско.рости, исполнительную сторону 7,
второй усилитель 8, второй двигатель 9, второй редуктор 10, второй датчик 11 угла, второй датчик 12 скорости, объект 13, сумматор 14, не.линейный блок 15;
Система работает следующим обраэом., ,
валы на задающей и исполнительной сторонах 1 и 2 находятся в согласованном положении, т.e,, следовательно,(Tel 0. Оператор/ начинает изменять положение вала на задающей стороне 1. При этом в начальный момент движения оператор выбирает люфт в кинематических передачах, который может быть весьма незначительным. Прикладываемый при этом момент оператора пренебрежимо мал. Положение вала на задающей сто.роне изменяется, т.е .o/jm и, следовательно, появляется отличное от нуля рассогласование f О. Это рассогласование включает нелинейный блок 15 типа реле с нулевой нейтральной точкой.
Таким образом, еще до начала вращения первого и второго двигателей 3 и 9 (т.е. до приложения оператором необходимого момента) включается нелинейнаяКоррекция, компенсирующая отрицательное влияние сухого трения. Это приводит к значительному уменьшению пиков ошибок системы в начальный момент ее движения.
Предлагаемая коррекция позволяет уменьшить ошибки системы и при из-менении направления скорости движени .Если оператор принимает решение изменить направление движения и уменьшает прикладываемый им момент, то система начинает движение в сторону уменьшения имеющегося рассогласоваНИН Гвстречное движение задающего и исполнительного органов). Кактолько величина, рассогласования изменя-. ет свой знак - изменяет знак и нелинейная коррекция. Если при этом двигатель 9 на исполнительной стороне 7 сохраняет прежнее направление вращения (за счет инерционности нагрузки и кинематических частей), то нелинейная коррекция не компенсирует
момент трения, а увеличивает его вдвое и тем самым способствует скорейшему торможению двигателя 9 и изменению направления его вращения. Следовательно, в рассматриваемой системе происходит уменьшение пиков ошибок также и при реверсе. Как только двигатель 9 изменяет направление вращения на противоположное, сигнал нелинейной коррекции опять является компенсирующим для момента сухого трения.
Применение изобретения позволяет значительно упростить систему.
Формула изобретения
Обратимая следящая система, содержащая нелинейный элемент и на задающей стороне - последовательно соединенные первый усилитель и первый двигатель, вал которого, через первый редуктор связан с первым датчиком угла и с первым датчиком скорости, на исполнительной стороне - последовательно соединенные второй усилитель и второй-.двигатель, вал которого через второй редуктор связан с вторым датчиком угла и с вторым датчик.ом скорости, причем выходы первого и второго датчиков скорости подключены соответственно к первому и второму взсодам первого и второго усилителей, третьи входы которых соеди-нены с выходом сумматора, первым и вторым входами подключенного к выходу первого и второго датчиков угла соответственно, .отличающаяс я тем, что,с целью упрощения системы, в ней выход сумматора через нелинейный элемент соединен с четвертыми входами первого и второго усилителей.
Источники информации, принятые Ёо внимание при экспертизе
