(54) СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫБОРОМ МАРШРУТА АВТОМАТИЧЕСКИ ДВИЖУЩИМСЯ ТРАНСПОРТНЫМ
1
Изобретение относится к автоматизации транспортных работ, выполняемых безрельсовым самоходным транспортным средством внутри складов, цехов, на производственных территориях и участках «цех-цех и «цех- склад при задании маршрутов перемещения грузов с помощью кабеля, питаемого переменным током, уложенным в дорожное покрытие или на его поверхности.
Известна система для управления выбором марщрута автоматически движущимся транспортным средством, содержащая размещенный вдоль трассы движения марщрутный кабель, подключенный к генератору переменного тока и образующий в местах контроля петл.и индикации с повышенным электромагнитным полем, а на транспортном средстве - чувствительные элементы, взаимодействующие с электромагнитным полем марщрутного кабеля, один из которых соединен с первым, а другой - со втормм и третьим амплитудно-фазовыми детекторами, усилители-сумматоры, один и другой входы одного из которых подключены к выходам соответственно первого и второго амплитудно-фазовых детекторов, а СРЕДСТВОМ
выход подключен к блоку управления движением, входы другого подключены к выходам соответственно первого и третьего амплитудно-фазовых детекторов, а выход соединен с входом компаратора 1.
5Недостатком известной системы являются ограниченные функциональные возможности управления.
Цель изобретения - расширение функциональных возможностей управления.
,Q Поставленная цель достигается тем, что на трассе выполнены образованные маршрутным кабелем петли разветвления, имеющие форму удлиненного ромба с большей диагональю по направлению перемещения, большие стороны которого размещены по
15 направлению поворотов налево и направо, а меньщие стороны перпендикулярны касательным в точках окончания поворота, на транспортном средстве дополнительно установлен блок выбора маршрута с числом
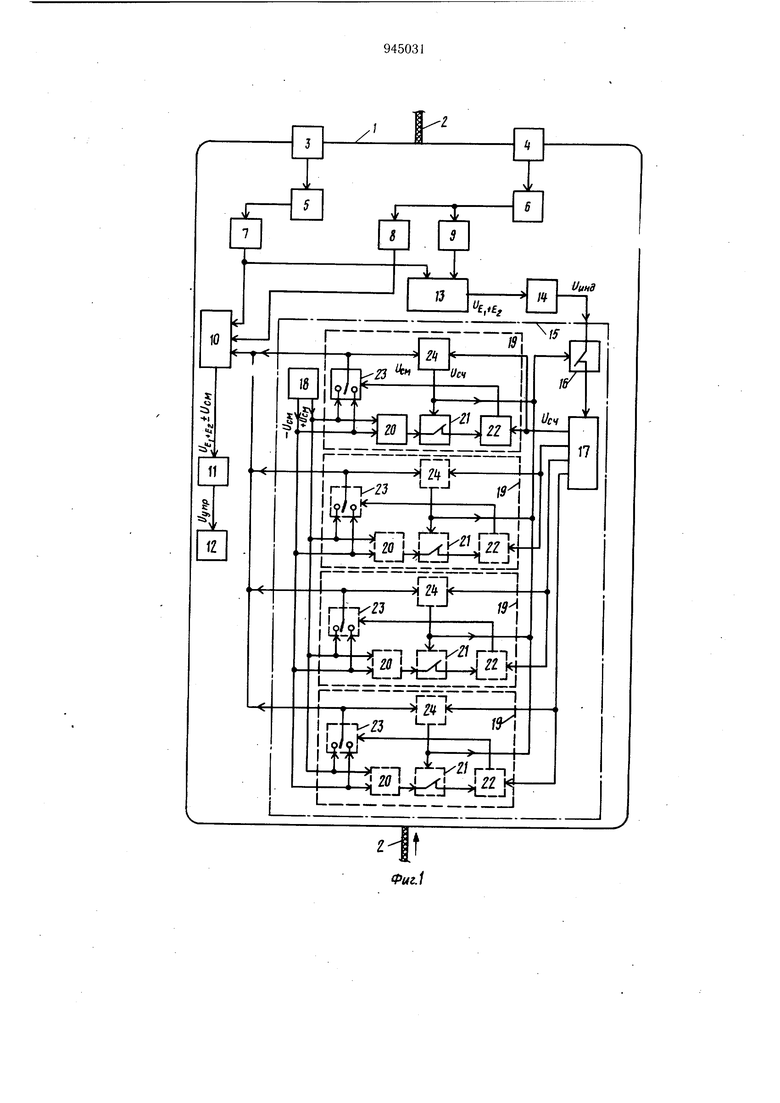
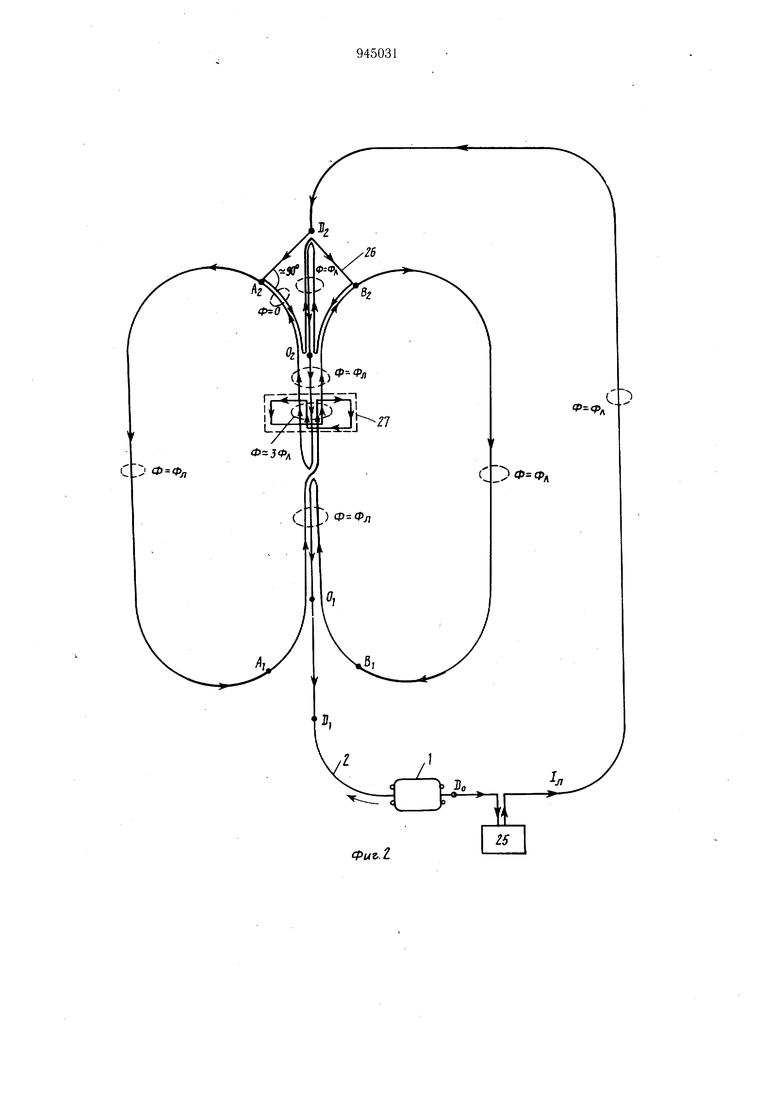
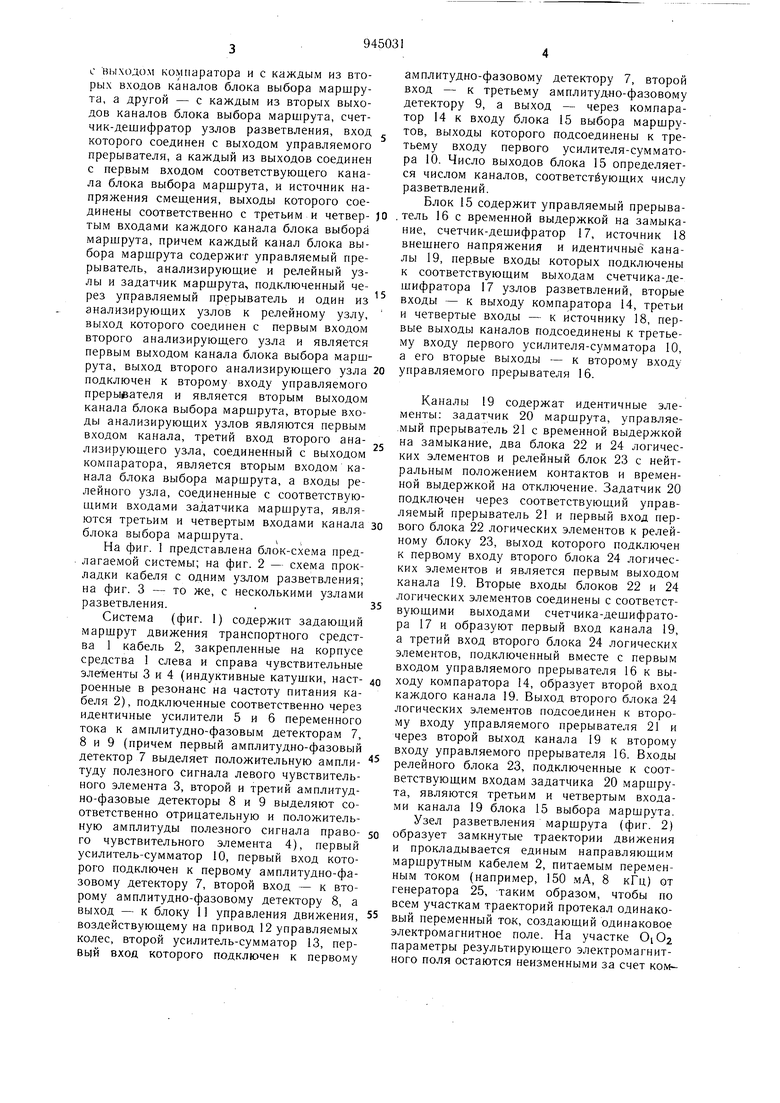
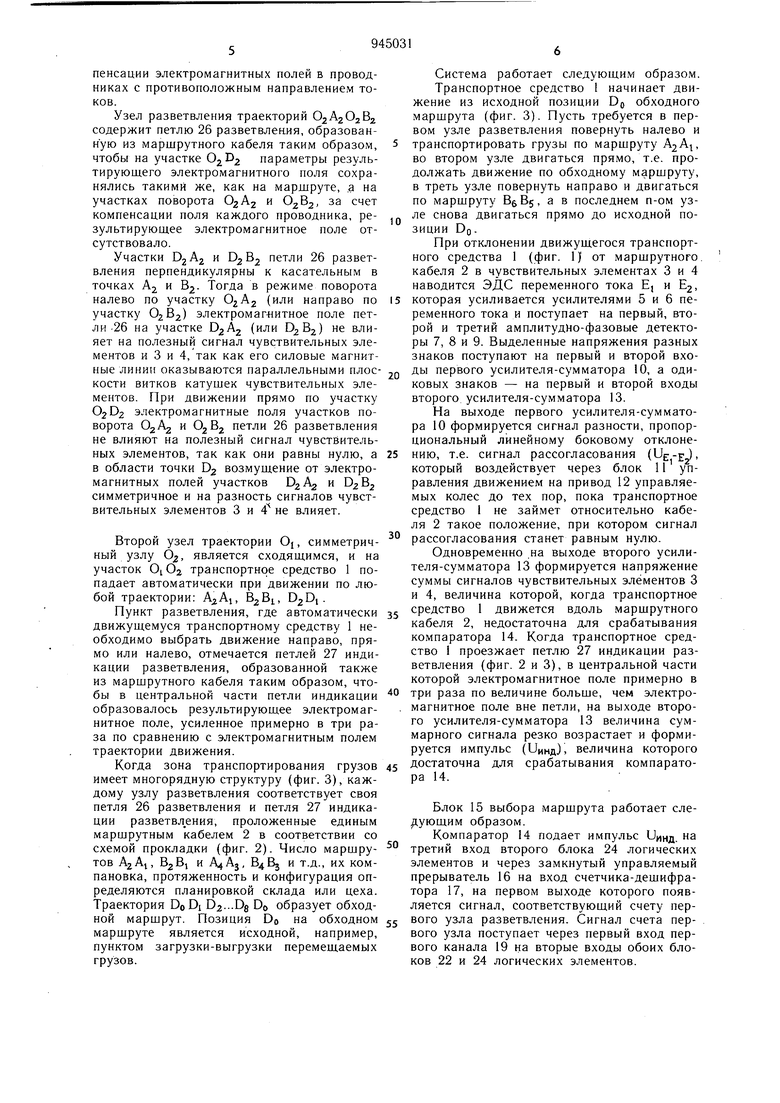
20 каналов, равным количеству узлов разветвления марщрута, первый .выход каждого из которых соединен с третьим входом первого усилителя-сумматора, управляемый прерыватель, один вход которого соединен L- ВЫХОДОМ KOiviiiapaTOpa и с каждым из вторых входов каналов блока выбора маршрута, а другой - с каждым из вторых выходов каналов блока выбора маршрута, счетчик-дешифратор узлов разветвления, вход которого соединен с выходом управляемого прерывателя, а каждый из выходов соединен с первым входом соответствующего канала блока выбора маршрута, и источник напряжения смешения, выходы которого соединены соответственно с третьим и четвертым входами каждого канала блока выбора маршрута, причем каждый канал блока выбора маршрута содержит управляемый прерыватель, анализирующие и релейный узлы и задатчик маршрута, подключенный через управляемый прерыватель и один из анализирующих узлов к релейному узлу, выход которого соединен с первым входом второго анализирующего узла и является первым выходом канала блока выбора маршрута, выход второго анализирующего узла подключен к второму входу управляемого прерывателя и является вторым выходом канала блока выбора маршрута, вторые входы анализирующих узлов являются первым входом канала, третий вход второго анализирующего узла, соединенный с выходом компаратора, является вторым входом канала блока выбора маршрута, а входы релейного узла, соединенные с соответствующими входами задатчика маршрута, являются третьим и четвертым входами канала блока выбора марщрута. На фиг. 1 представлена блок-схема предлагаемой системы; на фиг. 2 - схема прокладки кабеля с одним узлом разветвления; на фиг. 3 - то же, с несколькими узлами разветвления. Система (фиг. 1) содержит задающий маршрут движения транспортного средства 1 кабель 2, закрепленные на корпусе средства 1 слева и справа чувствительные элементы 3 и 4 (индуктивные катушки, настроенные в резонанс на частоту питания кабеля 2), подключенные соответственно через идентичные усилители 5 и б переменного тока к амплитудно-фазовым детекторам 7, 8 и 9 (причем первый амплитудно-фазовый детектор 7 выделяет положительную амплитуду полезного сигнала левого чувствительного элемента 3, второй и третий амплитудно-фазовые детекторы 8 и 9 выделяют соответственно отрицательную и положительную амплитуды полезного сигнала правого чувствительного элемента 4), первый усилитель-сумматор 10, первый вход которого подключен к первому амплитудно-фазовому детектору 7, второй вход - к второму амплитудно-фазовому детектору 8, а выход - к блоку 11 управления движения, воздействующему на привод 12 управляемых колес, второй усилитель-сумматор 13, первый вход которого подключен к первому амплитудно-фазовому детектору 7, второй вход - к третьему амплитудно-фазовому детектору 9, а выход - через компаратор 14 к входу блока 15 выбора маршрутов, выходы которого подсоединены к третьему входу первого усилителя-сумматора 10. Число выходов блока 15 определяется числом каналов, соответствующих числу разветвлений. Блок 15 содержит управляемый прерыватель 16 с временной выдержкой на замыкание, счетчик-дешифратор 17, источник 18 внешнего напряжения и идентичные каналы 19, первые входы которых подключены к соответствующим выходам счетчика-дешифратора 17 узлов разветвлений, вторые входы - к выходу компаратора 14, третьи и четвертые входы - к источнику 18, первые выходы каналов подсоединены к третьему входу первого усилителя-сумматора 10, а его вторые выходы - к второму входу управляемого прерывателя 16. Каналы 19 содержат идентичные элементы: задатчик 20 марщрута, управляе,мый прерыватель 21 с временной выдержкой на замыкание, два блока 22 и 24 логических элементов и релейный блок 23 с нейтральным положением контактов и временной выдержкой на отключение. Задатчик 20 подключен через соответствующий управляемый прерыватель 21 и первый вход первого блока 22 логических элементов к релейному блоку 23, выход которого подключен к первому входу второго блока 24 логических элементов и является первым выходом канала 19. Вторые входы блоков 22 и 24 логических элементов соединены с соответствующими выходами счетчика-дещифратора 17 и образуют первый вход канала 19, а третий вход второго блока 24 логических элементов, подключенный вместе с первым входом управляемого прерывателя 16 к выходу компаратора 14, образует второй вход каждого канала 19. Выход второго блока 24 логических элементов подсоединен к второму входу управляемого прерывателя 21 и через второй выход канала 19 к второму входу управляемого прерывателя 16. Входы релейного блока 23, подключенные к соответствующим входам задатчика 20 маршрута, являются третьим и четвертым входами канала 19 блока 15 выбора маршрута. Узел разветвления марщрута (фиг. 2) образует замкнутые траектории движения и прокладывается единым направляющим маршрутным кабелем 2, питаемым переменным током (например, 150 мА, 8 кГц) от генератора 25, таким образом, чтобы по всем участкам траекторий протекал одинаковый переменный ток, создающий одинаковое электромагнитное поле. На участке OiO2 параметры результирующего электромагнитного поля остаются неизменными за счет компенсации электромагнитных полей в проводниках с противоположным направлением токов.
Узел разветвления траекторий О2А2О2В2 содержит петлю 26 разветвления, образованную из маршрутного кабеля таким образом, чтобы на участке параметры результирующего электромагнитного поля сохранялись такими же, как на маршруте, а на участках поворота а счет компенсации поля каждого проводника, результирующее электромагнитное поле отсутствовало.
Участки DjAj и петли 26 разветвления перпендикулярны к касательным в точках А2 и 82- Тогда в режиме поворота налево по участку О2А2 (или направо по участку 0282) электромагнитное поле петли-26 на участке D2A2 (или 0282) не влияет на полезный сигнал чувствительных элементов и 3 и 4, так как его силовые магнитные линии оказываются параллельными плос кости витков катущек чувствительных элементов. При движении прямо по участку электромагнитные поля участков поворота 02А2 и 0282 петли 26 разветвления не влияют на полезный сигнал чувствительных элементов, так как они равны нулю, а в области точки Dj возмущение от электромагнитных полей участков D2A2 и 028 симметричное и на разность сигналов чувствительных элементов 3 и 4 не влияет.
8торой узел траектории Oj, симметричный узлу О, является сходящимся, и на участок Oi О2 транспортное средство 1 попадает автоматически при движении по любой траектории: , 828, D2D, .
Пункт разветвления, где автоматически движущемуся транспортному средству 1 необходимо выбрать движение направо, прямо или налево, отмечается петлей 27 индикации разветвления, образованной также из марщрутного кабеля таким образом, чтобы в центральной части петли индикации образовалось результирующее электромагнитное поле, усиленное примерно в три раза по сравнению с электромагнитным полем траектории движения.
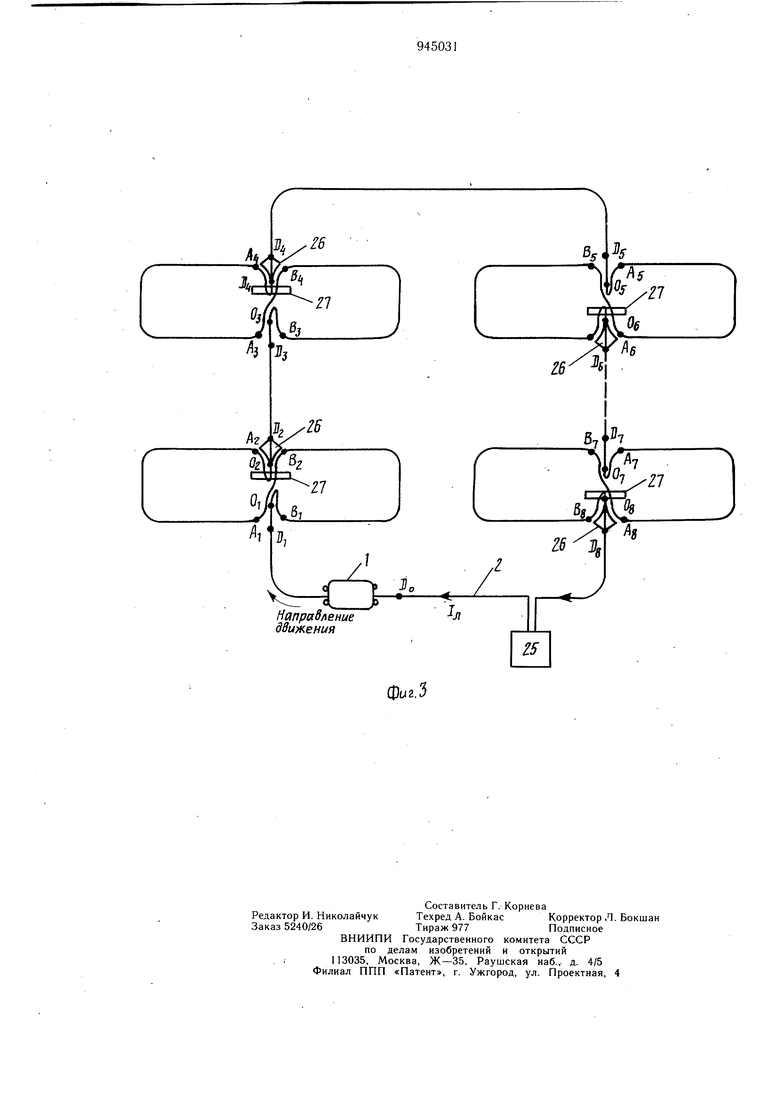
Когда зона транспортирования грузов имеет многорядную структуру (фиг. 3), каждому узлу разветвления соответствует своя петля 26 разветвления и петля 27 индикации разветвл ения, проложенные единым маршрутным кабелем 2 в соответствии со схемой прокладки (фиг. 2). Число маршрутов A2Ai, 828, и , 8483 и т.д., их компановка, протяженность и конфигурация определяются планировкой склада или цеха. Траектория DoDi D2...D8 DO образует обходной маршрут. Позиция DO на обходном маршруте является исходной, например, пунктом загрузки-выгрузки перемещаемых грузов.
Система работает следующим образом.
Транспортное средство 1 начинает движение из исходной позиции DO обходного марщрута (фиг. 3). Пусть требуется в первом узле разветвления повернуть налево и транспортировать грузы по маршруту во втором узле двигаться прямо, т.е. продолжать движение по обходному маршруту, в треть узле повернуть направо и двигаться по маршруту , а в последнем п-ом узле снова двигаться прямо до исходной позиции DOПри отклонении движущегося транспортного средства 1 (фиг. 1J от маршрутного, кабеля 2 в чувствительных элементах 3 и 4 наводится ЭДС переменного тока Ej и 2, которая усиливается усилителями 5 и 6 переменного тока и поступает на первый, второй и третий амплитудно-фазовые детекторы 7, 8 и 9. 8ыделенные напряжения разных знаков поступают на первый и второй входы первого усилителя-сумматора 10, а одиковых знаков - на первый и второй входы второго усилителя-сумматора 13.
На выходе первого усилителя-сумматора 10 формируется сигнал разности, пропорциональный линейному боковому отклонению, т.е. сигнал рассогласования (). который воздействует через блок 11 управления движением на привод 12 управляемых колес до тех пор, пока транспортное средство 1 не зай.мет относительно кабеля 2 такое положение, при котором сигнал рассогласования станет равным нулю.
Одновременно на выходе второго усилителя-сумматора 13 формируется напряжение суммы сигналов чувствительных элементов 3 и 4, величина которой, когда транспортное средство 1 движется вдоль маршрутного кабеля 2, недостаточна для срабатывания компаратора 14. Когда транспортное средство 1 проезжает петлю 27 индикации разветвления (фиг. 2 и 3), в центральной части которой электромагнитное поле примерно в три раза по величине больше, чем электромагнитное поле вне петли, на выходе второго усилителя-сумматора 13 величина суммарного сигнала резко возрастает и формируется импульс (UnHflJ, величина которого достаточна для срабатывания компаратора 14.
Блок 15 выбора маршрута работает следующим образом.
Компаратор 14 подает импульс УИНД. на третий вход второго блока 24 логических элементов и через замкнутый управляемый прерыватель 16 на вход счетчика-дешифратора 17, на первом выходе которого появляется сигнал, соответствующий счету первого узла разветвления. Сигнал счета первого узла поступает через первый вход первого канала 19 на вторые входы обоих блоков 22 и 24 логических элементов. Одновременно через третий и четвертый входы первого канала 19 от источника 18 на вход релейного блока 23 и вход з.адатчика 20 поступает напряжение смещения, отрицательная полярность которого через задатчик 20 (например, переключатель с нейтральным положением, включенный согласно заданию в положение «Движение налево) и управляемый прерыватель 21 поступает на первый вход первого блока 22 логических элементов. При этом на выходе первого блока 22 логических элементов появляется сигнал, который воздействует на релейный блок 23 с временной выдержкой на отключение. В результате этого его контакт замыкается и на время tj подключает сигнал - UCM источника 18 к третьему входу первого усилителя-сумматора 10. Момент подключения сигнала - UCM к третьему входу первого усилителя-сум.матора 10 соответствует приближению транспортного средства 1 к точке разветвления маршрутов Oj. Тогда на вход блока 11 управления движением поступает сигнал от рассогласования и внешнего источника. Сигнал рассогласования непрерывно устраняется блоком 11 в процессе управления движением, а сигнал от внешнего источника напряжения - UCM воздействуя через блок 11 на привод 12, поворачивает управляемые колеса налево, и транспортное средство 1 начинает движение вдоль участка О2А2. Так как на участке О2А2 электромагнитное поле отсутствует, правый чувствительный эле.мент 4 после поворота под действием сигнала - UCN оказывается над электромагнитным полем участка , а левый чувствительный элемент 3 в области нулевого электромагнитного поля. Тогда фактическое положение транспортного средства 1 определяется сигналами UEJ-UCN. Величина сигнала смещения до.тжна быть равна или несколько превышать амплитудное значение полезного сигнала чувствительного элемента 4 (или 3). Этим задается точность движения транспортного средства по участкам поворота (и- петли 26. Через интервал времени ti, соответствующий приближению транспортного средства 1 к точке А2, релейный блок 23 первого канала 19 (его контакт) возвратится в исходное нейтральное состояние и на третий вход первого усилителя-сумматора 10 прекратится поступление сигнала внешнего с.мещения UCM- Чувствительные элементы 3 и 4 попадают в область электро.магнитного поля участка траектории А2А, и транспортное средство автоматически движется по маршруту ,. Сигнал отключения релейного блока 23 первого канала формирует сигнал логической единицы на первом входе второго блока 24, на втором и третьем входах которого имеются логические единицы от сигнала петли ,27 индикации разветвления первого узла, поступившие с первого выхода счетчика-дешифратора 17 и компаратора 14. Тогда на выходе второго блока 24 появится управляющий сигнал, который, воздействуя на управляемые прерыватели 16 и соответствующий 21, размыкает их. Когда транспортное средство 1 пройдет участок О|О2, оно вторично проходит петлю 27 (фиг. 2) первого узла разветвления, на выходе компаратора 14 снова появляется импульс индикации УИНД, который поступает на третий вход второго блока 24, но не проходит на вход счетчика-деп1ифратора 17 через разомкнутый управляемый нрерыватель 16. При этом счет узлов не .меняется, логическая единица на вторых ВЕэ1Ходах блоков 22 и 24 первого канала 19 сохраняется, но, так как на первый вход первого блока 22 сигнал от задатчика 20 этого капала не поступает через разо.мкнутый управляемый прерыватель 21, релейный б;кж 23 этого канала не получит управляюнато си;:нала и вторичное подключение сигнала внечпнего смещения от источника 18 к треть ему входу усилителя-сумматора 10 не произойдет. При этом транспортное средство 1 движется прямо по участку OjDj. Однов)еменНО этот второй импульс индикации при 1Овторном прохождении петли 27 индикяп.ии разветвления первого узла, блоки|)уя прохождение сигнала по заданию в 1е;)вом кана.ле 19 и сигнала счета узлов, возвращает второй блок 24 в исходное состояние и при этом его выходной сигнал через интервал времени t за.мыкает управляемые нре|)ыватели 16 и 21, т.е. восстанавливает их исхо;.ное замкнутое состояние н обеспечивает готовность счетчика-деп1ифратора 17 к продолжению счета узлов разветвления. Транспортное средство 1 автоматически днижегся по участку D2DjO304 и проходит петлю 27 индикации разветвления второго уз.ча (фиг. 3). И.мпульс индикации второго узла разветвления через второй вход второго канала 19 поступает на третий вход второго блока 24 и через замкнутый управляемый прерыватель 16 на вход счетчика-де1пифратора 17, на втором выходе которого появится сигнал счета, поступающий на первый вход второго канала 19. При это.м первый канал 19 оказывается отключенным от третьего входа первого усилителя-сумматора 10, так как на перв(;м выходе счетчика-дешифратора 17 устанавливается нуль и блок 22 первого канала i:e выдает управляющий сигнал на релейный блок 23 этого канала. Так как согласно заданию во втором узле 26 разветвления (фиг. 3) транспортное средство 1 должно двигаться прямо, т.е.
по участку траектории , задатчик 20 марифута второго канала 19 стоит в нейтральном положении, при котором сигнал внешнего смещения от источника 18 не поступает на первый вход первого блока 22 второго капала выбора маршрута.
При этом на выходе блока 22 этого канала не формируется управляющий сигнал, контакты релейного блока 23 также остаются в нейтральном состоянии и на третий вход первого усилителя-сумматора 10 не поступает сигнал внещнего смещения. В результате нейтрального состояния релейного блока 23 на первый в.ход второго блока 24 второго канала 19 также не поступает сигнал логической единицы и его управляемый прерыватель 21 и управляемый прерыватель 16 сохраняют свое исходное замкнутое состояние. Транспортное средство 1 движется в петле 26 разветвления по участку 0404.
Когда транспортное средство 1 проходит петлю 27 индикации трс его узла разветвления, т.е. участок OsO, импульс счета появляется на третье.м выходе счетчикадешифратора 17 и к третьему входу первого усилителя-сумматора 10 оказывается подключенным третий канал, а остальные отключены. Задатчик 20 этого канала стоит, согласно заданию, в положении «Движение направо, и сигнал впещнего смещения + UCM поступает на первый вход первого блока 22 третьего капала 19 блока 15 выбора маршрута.
Элементы третьего канала 19 работают аналогично эле.ментам первого канала, только под влиянием сигнала внешнего смещения положительной полярности +(JCMтранспортное средство 1 поворачивает направо и движется по траектории О 86850505, так как на блок 11 управления движением поступает суммарный сигнал, т.е. теперь чувствительный элемент 3 оказывается над электромагнитным полем центрального проводника петли 26 разветвления, а чувствительный элемент 4 - над нулевы.м электромагнитным полем поворота OgBg. При повторном прохождении петли индикации разветвления в третьем узле сигналы по заданию и счета не поступают на соответствующие входы блоков 22 и 24 третьего канала за счет размыкания управляемого прерывателя 16 и соответствующего управляемого прерывателя 21 после отпускания релейного блока 23 длительностью tj, и транспортное средство I движется по участку O5Dg...D7-Oy к п-му узлу разветвления. Одновременно пов торный сигнал петли индикации разветвления возвращает второй блок 24 этого канала в исходное состояние,, а выходной сигнал блока 24 через интервал времени t восстанавливает исходное замкнутое состояние управляемых прерывателей 21 и 16.
В узле п-го разветвления, согласно заданию, осуществляется движение прямо по
участку OgDgDo и элементы п-го канала выбора .мар1нрута работают аналогично элементам второго канала.
Если в исходной позиции DO положение задатчиков 20 соответствующих каналов
выбора маршрута не изменится, транспортное средство 1 осуществляет многократный повтор движения по этим участкам Mapinрута. В противном случае оно выполняет автоматическое движение по другим участкам, согласно новому заданию, вводимому в блок 16 путем изменения положений задатчиков 20 .
Оптимальный момент включения сигнала внешнего смещения соответствует прохождению транспортным средством 1 точки
5 марщрута О2, а оптимальная длительность действия сигнала внещнего смещения соответствует движению транспортного средства 1 по дуге марщрута .момент прохождения точки А контакты релейного блока 23 соответствующего канала 19 должны принять нейтральное состояние. При известной скорости движения транспортного средства и известному пути выбирается длительность временной выдержки на отпускание t релейных блоков 23. Если в процессе
транспортирования грузов, в течение смены, скорость движения машины изменилась, то после прохождения соответствующей петли 27 индикации разветвления моменту подключения сигнала внещнего смещения к третьему входу первого усилителя-сумматора 10
соответствует, например, точка О2 марщрута движения, а моменту отключения сигнала смещения - точка А2. Тогда до вьезда в петлю 26 разветвления транспортное средство 1 двигается с отрицательным смеJ щением относительно марщрутного кабеля 2, в петле 26 разветвления траектория движения совпадает, в пределах заданной точности воспроизведения марщрута, с положением кабеля на участке О2А2, а после выезда из петли 26 paзвeтBv eния транспортное средство снова двигается относительно маршрутного кабе„тя с отрицательным с.мещением.
После отключения сигнала внешнего смещения, через отрезок времени, определяемый временем регулирования блока 11 управления движением, фактическая траектория движения машины снова совпадает с положением марщрутного кабеля.
Аналогичная картина наблюдается и при выборе движения направо, т.е. при подклюQ чении сигнала внешнего смещения положительной полярности.
Расстояние от петли 27 индикации разветвления до петли 26 разветвления определяется скоростным режимо.м работы транспортного средства и быстродействием бло5 ка 15 выбора марщрутов.
Систе.ма для управления выборо.м маршрута авто.матически движущи.мся транспортным средством выполняется на серийных интегральных микросхемах, испытана на новой модели электротягача с автоматическим управлением движения.
Ожидаемая экономическая эффективность составляет 3000 руб. в год на одну единицу автоматизированного транспортного оборудования при его двухсменной работе.
Формула изобретения
Система для управления выбором маршрута автоматически движущимся транспортным средством, содержащая размещенный вдоль трассы движения марщрутный кабель, подключенный к генератору переменного тока и образующий в местах контроля петли индикации с повыщенным электромагнитным полем, а на транспортном средстве - чувствительные элементы, взаимодействующие с электромагнитным полем марщрутного кабеля, один из которых соединен с первым, а другой - со вторым и третьим амплитудно-фазовыми детекторами, усилителисумматоры, один и другой входы одного из которых подключены к выходам соответственно первого и второго амплитудно-фазовых детекторов, а выход подключен к блоку управления движением, входы другого подключены к выходам соответственно первого и третьего амплитудно-фазовых детекторов, а выход соединен с входом компаратора, отличающаяся тем, что, с целью расширения функциональных возможностей управления, на трансе выполнены образованные маршрутным кабелем петли разветвления, имеющие форму удлиненного ромба с больщей диагональю по направлению перемещения, больщие стороны которого размещены в направлении поворотов налево и направо, а меньщие стороны перпендикулярны касательным в точках окончания поворота, на транспортном средстве дополнительно установлен блок выбора марщрута с числом каналов, равным количеству узлов разветвления марщрута первый выход каждого из которых соединен с третьим входом первого усилителя-сумматора, управляемый прерыватель, один вход которого соединен с выходом компаратора и с каждым из вторых входов каналов блока выбора марщрута, а другой - с каждым из вторых выходов каналов блока выбора марщрута, счетчик-дещифратор узлов разветвления, вход которого соединен с выходом управляемого прерывателя, а каждый из. выходов соединен с первым входом соответствующего канала блока выбора марщрута, и источник напряжения смещения, выходы которого соединены соответственно с третьи.м и четверты.м входами
каждого канала блока выбора марщрута, причем каждый канал блока выбора маршрута содержит управляемый прерыватель, анализирующие и релейный узлы и задатчик марщрута, подключенный через управляемый прерыватель и один из анализирующих узлов к релейному узлу, выход которого соединен с первым входом второго анализирующего узла и является первы.м выходом канала блока выбора маршрута, выход второго анализирующего узла подключен к
второму входу управляемого прерывателя и является вторым выходом канала блока выбора маршрута вторые входы анализир)ющих узлов являются первым входом канала, третий вход второго анализирующего узла, соединенный с выходом компаратора, является вторым входом канала блока выбора марщрута, а входы релейного узла, соединенные с соответствующими входами задатчика маршрута, являются третьим и четвертым входами канала блок выбора марщрута.
Источники информации,
принятые во внимание при экспертизе
I. Авторское свидетельство СССР по заявке № 2794505/18-24, кл. G 08 G 1/01, 10.D7.79 (прототип);
)Ф
J. 26
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| Устройство для управления автоматически движущимся по заданному маршруту транспортным средтвом | 1984 |
|
SU1202982A1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВЕТВЛЕННОЙ КОНВЕЙЕРНОЙЛИНИЕЙ | 1969 |
|
SU233770A1 |
| Устройство дистанционного автоматизированного управления шахтными разветвленными конвейерными линиями | 1974 |
|
SU700661A1 |
| РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ КОНТРОЛЯ ЗАНЯТОСТИ БЛОК-УЧАСТКА И КАБЕЛЬНЫЙ ПЕТЛЕВОЙ ДАТЧИК КОНТРОЛЯ ПРОХОДА КОЛЕСНЫХ ПАР И ЕДИНИЦ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2340497C2 |
| Устройство для управления движениемАВТОМАТичЕСКОгО ТРАНСпОРТА | 1979 |
|
SU830493A1 |
| Устройство передачи маршрутных заданий в горочной автоматической централизации | 1979 |
|
SU861159A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2431200C1 |
| УСТРОЙСТВО для ЭЛЕКТРИЧЕСКОЙ ЦЕНТРАЛИЗАЦИИ СТРЕЛОК И СИГНАЛОВ БЛОЧНОГО ТИПА | 1969 |
|
SU253107A1 |
| Устройство релейной блокировки для малых станций | 1961 |
|
SU148094A1 |