Изобретение относится к автоматизации транспортных работ, выполняемых безрельсовым автоматически движущимся самоходным транспортным средством внутри складов, цехов и на других производственных территориях.
Цель изобретения - повьшение точности управления.
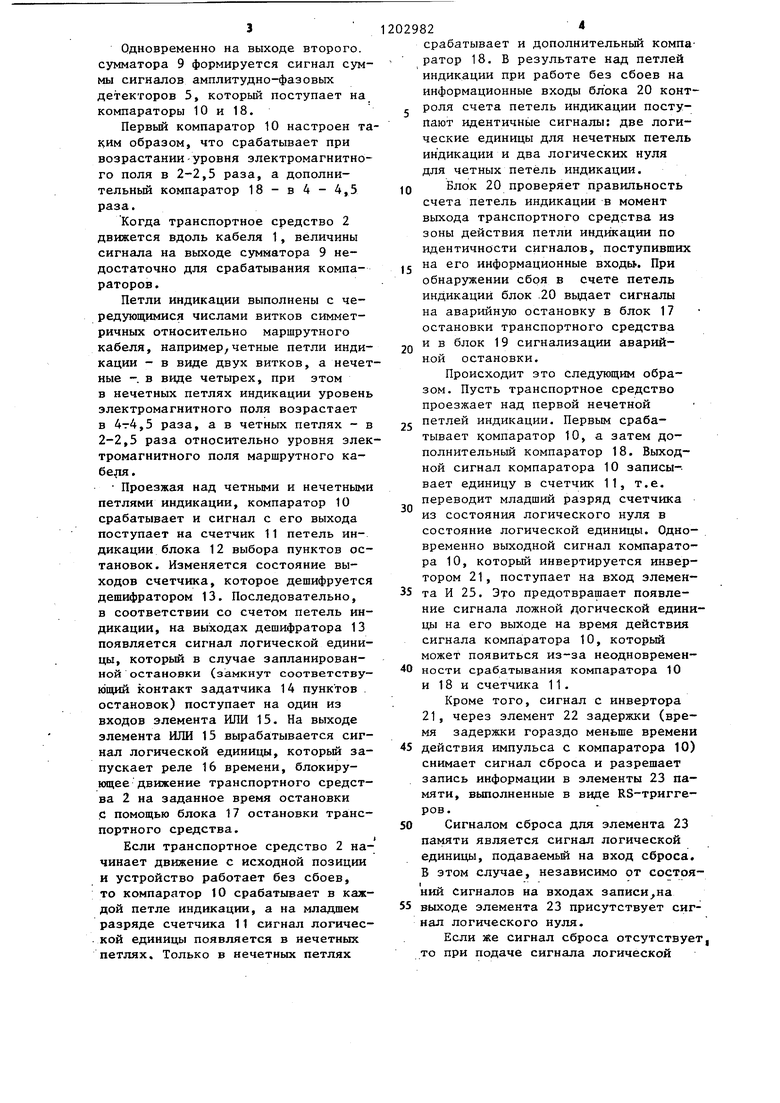
На фиг. 1 представлена блок-схема системы для управления автоматически движущимся трансшэртным средством; на фиг. 2 - принципиальная схема блока контроля, счета петель индикации.
Устройство для управления автоматически движущимся по заданному марш- ,руту транспортным средством содержит размещенный вдоль трассы движения маршрутный кабель 1, подключаемый к генератору переменного тока, образующий в местех контроля петли индикации, расположенные в плоскости дорожного покрытия си метрично относительно маршрутного кабеля, а на транспортном средстве 2 - датчики 3 линейного отклонения транспортного средства, взаимодействующие с электромагнитным полем маршрутного кабеля, и связанные через усилители
4 переменного тока с амплитудно-фазо- Q лы логических нулей, поэтому на
выми детекторами 5, выходы которых подключены через первый сумматор 6 и формирователь 7 управляющих сигналов к приводу 8 управляемых колес, а через второй сумматор 9 - к входу компаратора 10, выход которого подключен к счечику 11 петель индикации блока 12 выбора пунктов остановок .
Блок 12 выбора пунктов остановок содержит последовательно соединенные дешифратор 13, задатчик 14 пунктов остановок и элемент ИЛИ 15. К выходу блока 12 подключено реле 16 времени, выход которого подключен к входу блока 17 остановки транспортного средства. Транспортное средст- . во 2 снабжено дополнительным компаратором 18, блоком 19 сигнализации аварийной остановки и блоком 20 контроля счета петель индикации, информационные входы которого подключены соответственно к выходу младшего разряда счетчика 11 петель индикации и выходу дополнительного компаратора 18, установочный вход - к выходу первого компаратора 10, вход которого объединен с входом дополнительного компаратора 18, а выход блока
35
40
выходе элемента 24 и элемента 25 сигналы логического нуля, что соо ветствует отсутствию сигнала аварийной остановки. На выходе блока 12 выбора пунктов остановок сигна плановой остановки транспортного средства 2 также отсутствует, и п этому оно продолжает движение.
При отклонении движущегося тра портного средства 2 от маршрутног кабеля 1 в датчиках. 3 наводится ЭДС, переменного тока, которая уси ливается усилителями 4 переменног тока и поступает на амплитудно-фа зовые детекторы 5. Усиленные и де тектированные сигналы поступают на входы первого сумматора 6, на выходе которого формигзуется сигна их разности, пропорциональный линейному отклонению. На основании этого сигнала формирователь 7 фор мирует сигнал управления по канал линейного отклонения, который воз действует на привод 8 управляемых колес до тех пор, пока транспорт 55 ное средство 2 не займет относител но кабеля 1 такое положение, при к тором сигнал разности становится равным нулю.
45
50
20 контроля счета петель индикации - к объединенным входам блока 17 qc- тановки транспортного средства и блока 19 сигнализации аварийнойостановки, при этом петли индикации выполнены с чередующимися числами витков маршрутного кабеля 2.
Блок 20 контроля счета петель индикации содержит инвертор 21, элемент 22 задержки, два элемента 23 памяти, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 24 и элемент И 25, выход которого является выходом блока 20, а входы подключены соотвественно к выходу элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 24 и выходу инвертора 21, подключенного через элемент 22 задержки и входам сбро- . са элементов 23 памяти, входы записи которых являются информационными
входами блока 20, установочным входом которого является вход инвертора 21 .
Устройство работает следующим образом.
Транспортное средство 2 начинает движение из исходной позиции. Выходы всех разрядов счетчика 11 петель индикации обнулены, на выходе элементов 23 памяти также сигна-
Q лы логических нулей, поэтому на
35
40
выходе элемента 24 и элемента 25 сигналы логического нуля, что соответствует отсутствию сигнала аварийной остановки. На выходе блока 12 выбора пунктов остановок сигнал плановой остановки транспортного средства 2 также отсутствует, и поэтому оно продолжает движение.
При отклонении движущегося транпортного средства 2 от маршрутного кабеля 1 в датчиках. 3 наводится ЭДС, переменного тока, которая усиливается усилителями 4 переменного тока и поступает на амплитудно-фазовые детекторы 5. Усиленные и детектированные сигналы поступают на входы первого сумматора 6, на выходе которого формигзуется сигнал их разности, пропорциональный линейному отклонению. На основании этого сигнала формирователь 7 формирует сигнал управления по каналу линейного отклонения, который воздействует на привод 8 управляемых колес до тех пор, пока транспорт- 55 ное средство 2 не займет относительно кабеля 1 такое положение, при котором сигнал разности становится равным нулю.
45
50
Одновременно на выходе второго. сумматора 9 формируется сигнал суммы сигналов амплитудно-фазовых детекторов 5, который поступает на компараторы 10 и 18.
Первый компаратор 10 настроен таким образом, что срабатывает при возрастании - уровня электромагнитного поля в 2-2,5 раза, а дополнительный компаратор 18 - в 4 - 4,5 раза.
Когда транспортное средство 2 движется вдоль кабеля 1, величины сигнала на вькоде сумматора 9 недостаточно для срабатывания компараторов.
Петли индикации выполнены с чередующимися числами витков симметричных относительно маршрутного кабеля, например,четные петли индикации - в виде двух витков, а нечетные -. в виде четырех, при этом в нечетных петлях индикации уровень электромагнитного поля возрастает в 4г4,5 раза, а в четных петлях - в 2-2,5 раза относительно уровня электромагнитного поля маршрутного кабеля.
Проезжая над четными и нечетными петлями индикации, компаратор 10 срабатывает и сигнал с его выхода поступает на счетчик 11 петель индикации блока 12 выбора пунктов остановок. Изменяется состояние выходов счетчика, которое дешифруется дешифратором 13. Последовательно, в соответствии со счетом петель индикации, на выходах дешифратора 13 появляется сигнал логической единицы, который в случае запланированной остановки (замкнут соответствующий контакт задатчика 14 пунктов . остановок) поступает на один из входов элемента ИЛИ 15. На выходе элемента ИЛИ 15 вырабатывается сигнал логической единицы, которьй запускает реле 16 времени, блокирующее движение транспортного средства 2 на заданное время остановки с; помощью блока 17 остановки транспортного средства.
Если транспортное средство 2 начинает движение с исходной позиции и устройство работает без сбоев, то компаратор 10 срабатывает в каждой петле индикации, а на младшем разряде счетчика 11 сигнал логической единицы появляется в нечетных петлях. Только в нечетных петлях
202982
срабатывает и дополнительный компа- , ратор 18. В результате над петлей индикации при работе без сбоев на информационные входы блока 20 контроля счета петель индикации поступают идентичные сигналы: две логические единицы для нечетных петель индикации и два логических нуля для четных петель индикации.
IQ Блок 20 проверяет правильность счета петель индикации в момент выхода транспортного средства из зоны действия петли индикации по идентичности сигналов, поступивших
J, на его информационные входы-. При обнаружении сбоя в счете петель индикации блок .20 выдает сигналы на аварийную остановку в блок 17 остановки транспортного средства
- и в блок 19 сигнализации аварийной остановки.
Происходит это следующим образом. Пусть транспортное средство проезжает над первой нечетной
J, петлей индикации. Первым срабатывает компаратор 10, а затем дополнительный компаратор 18. Выходной сигнал компаратора 10 записы-. вает единицу в счетчик 11, т.е. переводит младший разряд счетчика из состояния логического нуля в состояние логической единицы. Одновременно выходной сигнал компаратора 10, который инвертируется инвертором 21, поступает на вход элемен35 та И 25. Это предотвращает появление сигнала ложной логической единицы на его выходе на время действия сигнала компаратора 10, который может появиться из-за неодновременно нести срабатывания компаратора 10 и 18 и счетчика 11.
Кроме того, сигнал с инвертора 21, через элемент 22 задержки (время задержки гораздо меньше времени
45 действия импульса с компаратора 10) снимает сигнал сброса и разрешает запись информации в элементы 23 памяти, выполненные в виде RS-тригге- ров.
50 Сигналом сброса для элемента 23 памяти является сигнал логической единицы, подаваемый на вход сброса. Б этом случае, независимо от состояний сигналов на входах записн на
55 выходе элемента 23 присутствует сигнал логического нуля.
Если же сигнал сброса отсутствует, то при подаче сигнала логической
30
51
единицы на вход записи элемента 23 на его выходе появляется сигнал логической единицы, т.е. происходит запись сигнала логической единицы в элемент 23 памяти.
Аналогично работает и второй элемент 23 памяти.
По окончании действия сигнала компаратора 10 проверяется логическое соответствие сигналов элементом ИСКЛЮЧАВДЕЕ ИЛИ 24 в течение времени задержки вырабатываемой элементом 22 задержки. Если сигналы на входах элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 24, посту пающие из элементов 23 памяти идент тичны (две единицы),л то логическое состояние на выходе элемента ИСКЛЮЧАЮЩЕЕ ШШ 24 не изменяется. Сигнал на аварийную остановку транспортного средства блоком 20 не вырабатывается По окончании действия элемента 22 задержки восстанавливается сигнал сброса, что приводит к стиранию информации в элементах 23 памяти.
029826
Если вторая петля четная,то компаратор 10 срабатывает, а дополнительный компаратор 18 не срабатывает.Младший разряд счетчика 11 изменяет свое 5 состояние:переходит из состояния логической единицы в нуль.Поэтому в элементах 23 памяти записываются два логических нуля. Эти сигналы также не изменяют логическое состояние на to выходах элемента ИСКЛЮЧАЮЩЕЕ ШШ 24 и элемента И 25. Следовательно, блок 20 сигнал на аварийную остановку и сигнализацию также не вырабатывает. В случаях сбоя логика соответствия J5 сигналов с выхода компаратора 18 и младшего разряда счетчика 11 нарушается, что вызывает появление напряжения логической единицыX на выходе элемента И 25 и аварийную 20 остановку транспортного средства. При этом срабатывает блок 23 сигнализации аварийной остановки, который осуществляет, например, световую или звуковую сигнализацию.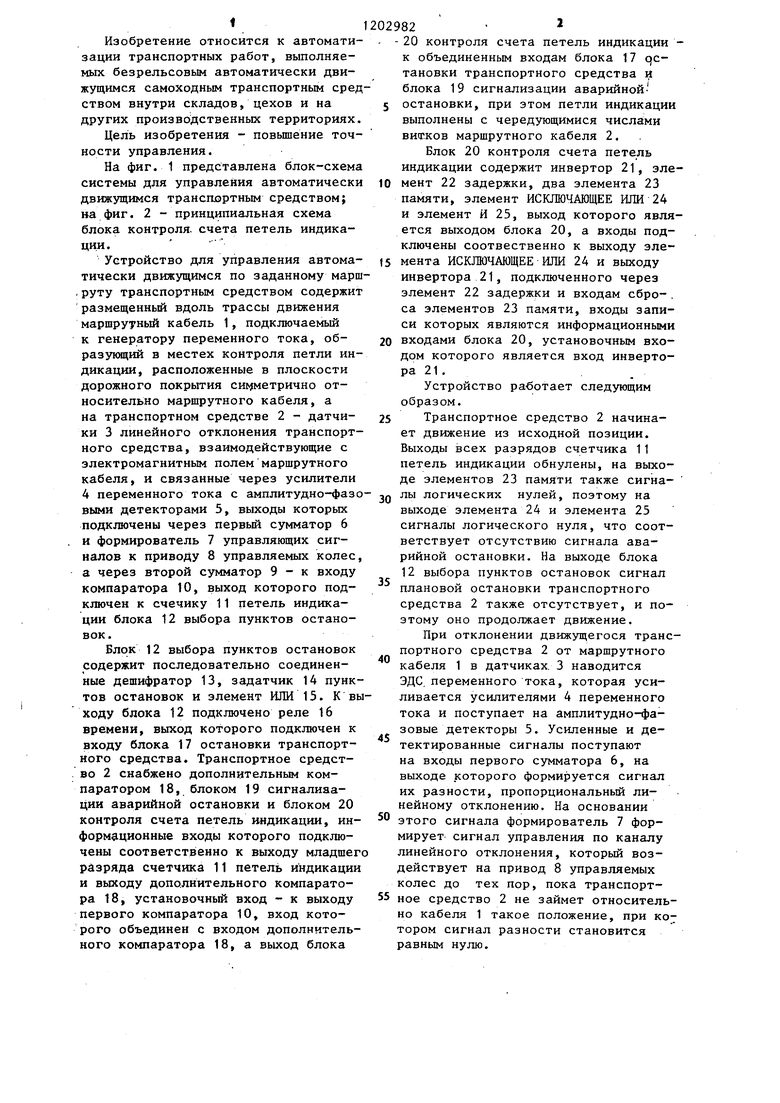
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движениемАВТОМАТичЕСКОгО ТРАНСпОРТА | 1979 |
|
SU830493A1 |
| Устройство для выдачи команд об изменении движения транспорта | 1986 |
|
SU1446640A1 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| Система для управления выбором маршрута автоматически движущимся транспортным средством | 1980 |
|
SU945031A1 |
| Устройство для управления движением автоматического транспорта | 1986 |
|
SU1320828A2 |
| Устройство для контроля остановки транспортного средства | 1988 |
|
SU1541654A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| БЛОК БЕЗОПАСНОСТИ | 2010 |
|
RU2449900C2 |
(Put. г
ВНИИПИЗаказ 8376/25 Тираж 870 Подписное Филиал ШШ Патент, г.Ужгород, ул.Проектная, 4
| Система для управления выбором маршрута автоматически движущимся транспортным средством | 1980 |
|
SU945031A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
