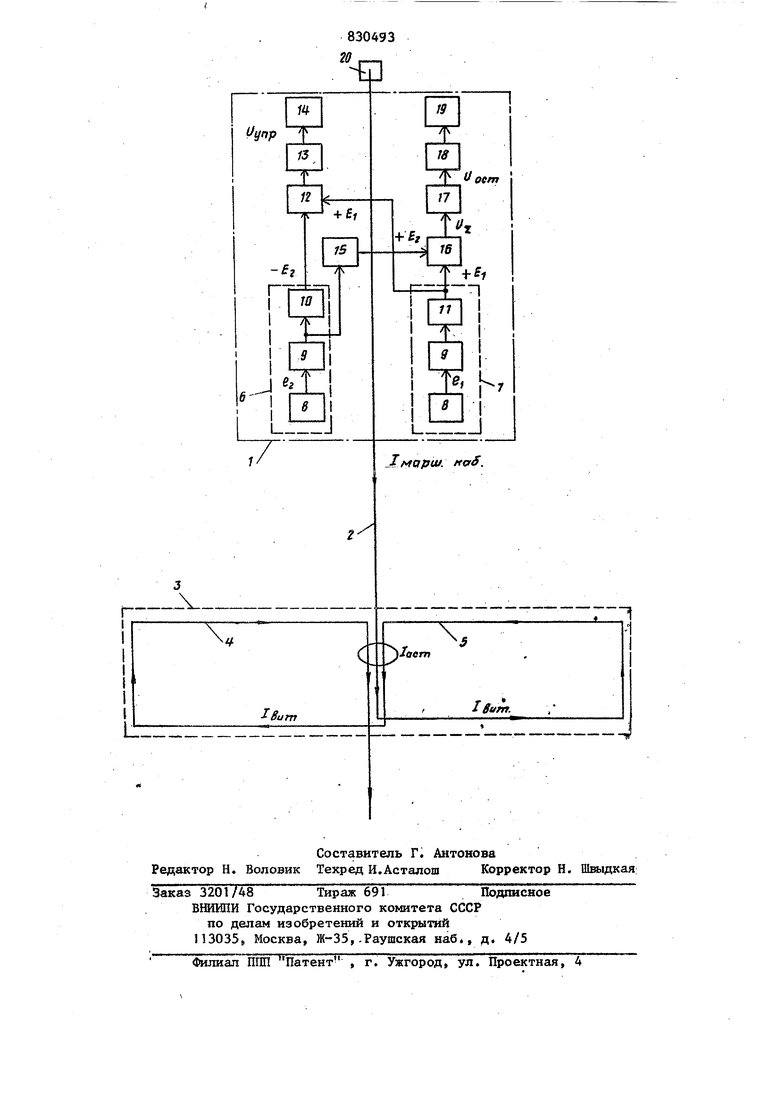
Изобретение относится к автоматиз ции транспортных работ, выполняегфос колесным нерельсовым самоходным тран портно-погрузочным оборудованием, направление движения ко торых задается с помощью токонесущего кабеля, для осуществления автоматических остановок в заданных пунктах (например, для выполнения.погрузочно-разгрузочных операций), а также для автоматического контроля прохождения движущимся транспортным объектом определенных участков маршрута (например, автоматического распознавания ответвлеш{й, пересечений, поворотов и т.п.) Известно устройство для обмена информацией между транспортом и . станцией, содержащее станционный генератор, подключенный к линии связи и установленные на транспорте датчики и приемники информации D1. Наиболее близким техническим решением является устройство для управления движением автоматического транспорта, содержащее установленный на трассе движения маршрутный кабель и установленные на транспортном средстве последовательно соединенные датчик, усилитель, атшитудный детектор, блок распознавания кодов, блок управления и исполнительный блок Г2J. Недостатком данных устройств является малая надежность и низкая помехозафщенность. Цель изобретения - повьшение надежности и помехозащищенности устройства. Поставленная цель достигается тем,. что в устройство введены второй датчик, второй усилитель, второй и третий амплитудные детекторы, компаратор, два усилителя постоянного тока, реле времени и блок отключения привода, выход второго датчика соединен через второй усилитель со входом второго амплитудного детектора, выходы первого и второго амплитудных детекторов соединены со входами первого усилителя постоянного тока, выход которого подключен ко входу блока управления, выход второго усилителя подключен ко входу третьего амплитудного детектора, выходы второго и третьего амплитудных детекторов соединены со входами второго усилителя постоянного тока, выход которого подключен ко входу компаратора, выход которого через реле времени соединен со входом блока отключения привода. Кроме .того, в местах остановок транспортного средства на трассе маршрутньш кабель выполнен в виде двух петель, расположенных в плоскост дорожного покрытия симметрично относительно линии расположения маршрутного кабеля. На чертеже представлена блок-схема устройства. Устройство содержит движущееся транспортное средство 1, маршрутный кабель 2, петлю 3 остановки, состоящую из прямоугольного правого витка и такого же левого витка 5, расположенных в плоскости дорожного покрыти симметрично относительно маршрутного кабеля таким образом, что направлени токов в центральной части витков сов падает с направлением тока маршрутно го кабеля, измерительные каналы 6 и линейного отклонения транспортного средства, влево 6 и вправо 7 от марш рутного кабеля, состояш ие из датчико 8 линейного отклонения объекта от пред писанного маршрута, усилителя 9 переменного тока и амплитудных детекто ров 10 и 11, выделяющих соответствен отрицательную амплитуду полезного сигнала и положительную, суммирующий усилитель 12 постоянного тока, форми рующий сигнал, управления по кана линейного отклонения, который поступ ет через блок 13 управления на приво 14 управляемых колес, амплитудный детектор 15, выделяющий амплитуду полезного сигнала такого же знака, как амплитудньш детектор 11, суммир щий усилитель 16 постоянного тока автоматической остановки (или усили тель распознавания), формирующий си нал остановки UQ (или сигнал расп навания), компаратор 17, реле 18 времени и блок 19 отключения привод ведущих колес. Маршрутный кабель 2 подключен на станции к генератору 2 который обеспечивает питание кабеля высокочастотным током. Устройство работает следующим обазом. При движении транспортного средста 1 по маршрутному кабелю 2, питаеому переменным током (например 150 мА 8 кГц), в датчиках 8 (индуктивных атушках) измерительшлх каналов 6 и 7 наводится ЭДС переменного тока, котоая усиливается усилителями 9 переменого тока. Усиленные сигналы поступат на вход амплитудных детекторов 10 11, один из которых (Ю) выделяет отрицательную амплитуду полезного сигнала, а другой (П) - положительную. Выделенные напряжения разных знаков поступают на вход суммирующего усилителя 12 постоянного.тока, формирующего с помощью блока 13 сигнал управления о каналу линейного отклонения, который воздействует на привод 14 управляемых колес. Так как измерительные каналы 6 и 7 идентичны, то когда продольная ось симметрии транспортного средства совпадает снаправлением маршрутного кабеля 2, сигнал Uv(f,ppaBeH нулю (алгебраическая сумма сигналов датчиков 8 равна нулю). При отклонении транспортного средства I вправо или влево от кабеля 2 на выходе усилителя 12 появляется сигнал, пропорциональный линейному (Отклонению от задающего маршрут «кабеля. Одновременно сигналы, усиленные, усилителями 9 переменного ток, поступают на входы амплитудных детекторов 15 и 11, выделяющих амплитуду полезного сигнала одинакового знака. Выделенные напряжения одинакового знака поступают на вход суммирующего усилителя 16 автоматической остановки (усилители распознавания). В результате, когда транспортное средство 1 движется по маршрутному кабелю 2 без ошибки, на выходе усилителя 16 сигнал равен удвоенному полезному сигналу датчиков 8, величина которого недостаточна для срабатывания компаратора 17. При въезде транспортного средства 1 в петлю 3 остановки устройство работает следующим образом. Так как направление токов в центральной части витков 4 и 5 петли 3 остановки совпадает с направлением тока маршрутного кабеля 2, в петле остановки злектромагнитное поле по величине существенно отличается от электромагнитного поля маршрутного кабеля. В результате этого величина полезного сигнала, наводимого в датчиках 8, когда транспортное средство 1 находится в петле 3, существенно увеличивается и сигнал автоматической остановки (или сигнал распознава ния) возрастает в 3-3,5 раза по срав нению с его же величиной вне петли.. напряжения срабатывания компаратора 17. Ц-р выбирается такой, чтобы транспортное средство 1 останавливалось в пределах заданной точности воспроизведения маршрута внутри петли 3 остановки. При максимально допустимой точности воспроизведения маршрута компаратор 17 сработает до въезда транспортного средства 1 в петлю 3 остановки, но за счет инерции длины тормозного пути остановка произойдет также впетле остановки. Усиленное витками остановки 4 и 5 электромагнитное поле не влияет на режим автоматического управления дви жением, так как для целей автоматиче кого управления движением использует ся разность сигналов датчиков 8. Используемая для целей автоматиче ких остановок (для автоматического распознавания) сумма сигналов тех же датчиков 8 по величине недостаточна для срабатывания компаратора 17, ког да транспортное средство 1 находится вне петли даже при максимально допус ТИМОМ отклонении от маршрутного кабеля. И только усиленное витками остановки электромагнитное поле формируе сигнал остановки (как сигнал распозн вания), величина которого достаточна для срабатывания компаратора I7. Компаратор 17 управляет через рел 18 времени блоком 19 отключения привода ведущих колес транспортного средства 1. Реле 18 време ш обеспечивает требуемую длительность остановки (от нескол,ких секунд до одного часа ). По истечении заданной длительности остановки реле 18 времени возвращается в исходное состояние, а транспортное средство 1 продолжает движение по маршруту .следующего пункта остановки. Ожидаемая экономическая эффективность составляет 2649 руб. в год на 36 одну единицу автоматнзировакного транспортного оборудования при его двухсменной работе. Фоомула изобретения 1 . Зстройство для управления движением автоматического транспорта, содержащее установленный на трассе движения маршрутный кабель, подключенный к генератору переменного тока, а на транспортном средстве - последовательно соединенные первый датчик, первый усилитель и первый амплнтудный детектор, и блок управления, выход которого соединен со входом привода, отличающееся тем что, с целью повышения надежности и помехозащищенности устройства, в него введены второй датчик, второй усилитель, второй и третий амплитудные детекторы, компаратор, два усилителя постоянного тока, реле времени и блок отключения привода, выход второго датчика соединен через второй усилитель со входом второго амплитудного детектора, выходы первого и второго амплитудных детекторов соединены- со входами первого усилителя постоянного тока, выход которого подключен ко входу блока управления, выход второго усилителя подключен ко входу третьего амплитудного детектора, выходы второго и третьего амплитудных детекторов соединены со входами второго усилителя постоянного тока, выход которого подключен ко входу компаратора, выход которого через реле времени соединен со входом блока отключения привода. 2. Устройство ПОП.1, отличающееся тем, что в местах остановок транспортного средства на трассе маршрутный кабель выполнен в виде двух петель, расположенных в плоскости дорожного покрытия симметрично относительно линии расположения маршрутного кабеля. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 305095, кл. В 61 L 1/08, 1968. 2.Авторское свидетельство СССР № 297522, кл. В 61 L 1/09, 1969 (прототип).
-I марш. Hci3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением автоматического транспорта | 1986 |
|
SU1320828A2 |
| Устройство для управления автоматически движущимся по заданному маршруту транспортным средтвом | 1984 |
|
SU1202982A1 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| Система для управления выбором маршрута автоматически движущимся транспортным средством | 1980 |
|
SU945031A1 |
| Устройство для определения местоположения транспортного средства | 1984 |
|
SU1252762A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2160929C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| Устройство для выдачи команд об изменении движения транспорта | 1986 |
|
SU1446640A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2431200C1 |
| Устройство управления подвижным транспортным средством | 1985 |
|
SU1336081A1 |