(5) ПОЗИЦИОННЫЙ ГИДРОПРИВОД (ПНЕВМОПРИВОД)
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидро(пневмо)привод | 1987 |
|
SU1650966A1 |
| Пневмопривод | 1980 |
|
SU945504A1 |
| Гидропривод | 1979 |
|
SU850947A1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU909360A1 |
| Гидропривод | 1982 |
|
SU1060820A2 |
| Гидропривод | 1981 |
|
SU964275A1 |
| Электрогидравлический привод | 1979 |
|
SU808713A1 |
| Гидропривод | 1977 |
|
SU684167A1 |
| Управляющее устройство плоского поворотного золотника | 1981 |
|
SU985474A1 |
| Регулятор скорости гидродвигателя | 1978 |
|
SU857547A1 |
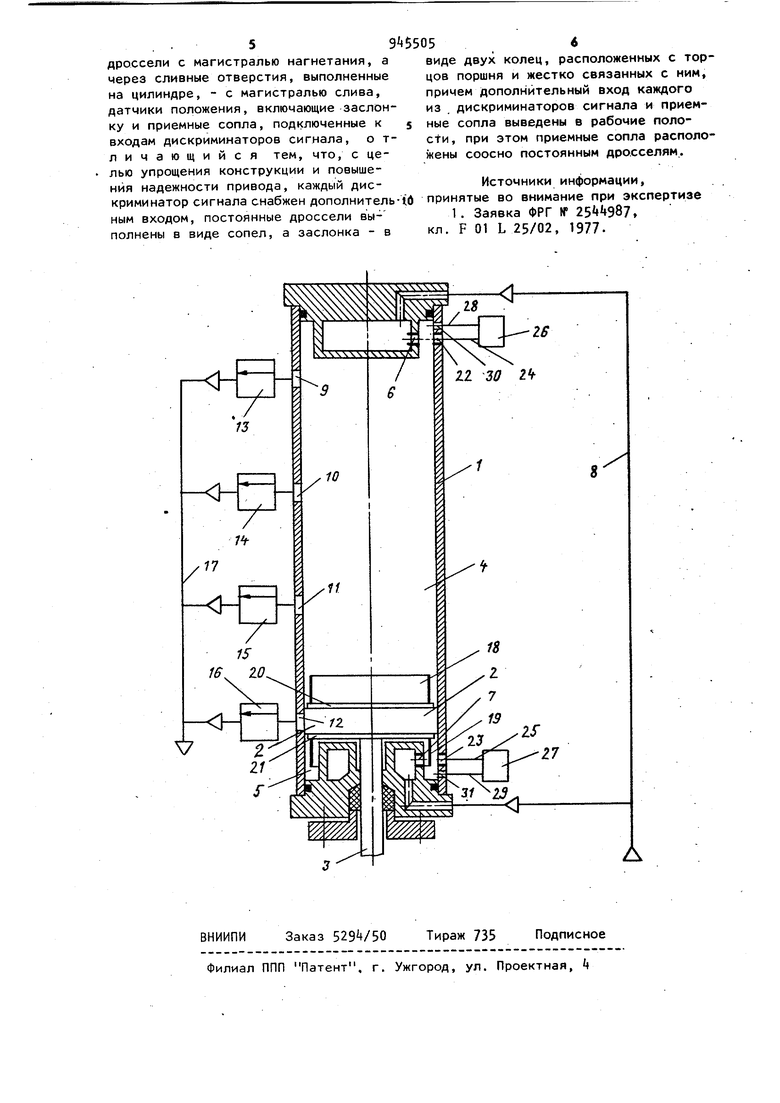
Изобретение относится к пневматическим (гидравлическим) шаговым прив дам и может быть использовано в сист мах автоматики в различных отраслях техники, преимущественно в металлургии, химии, энергетике. Известен позиционный гидропривод (пневмопривод), содержащий магистрали слива и нагнетания, цилиндр с размещенным в нем поршнем с образова нием рабочих полостей, сообщенных че рез постоянные дроссели с магистралью нагнетания, а через сливные отверстия, выполненные на цилиндре, с магистралью слива, датчики положения, включающие заслонку и приемные сопла, подключенные к входам дискриминаторов сигнала LlJ. Недостатком известного устройства является наличие в приводе двух высо конадежных пневматических систем с отдельными источниками или систем связанных друг с другом устройством снижения давления, а также подпружиненных заслонок, внешних уплотнительных элементов, что в целом усложняет конструкцию и понижает надежность привода. Целью изобретения является упрощение конструкции и повышение надежности привода. Поставленная цель достигается тем, что каждый дискриминатор сигнала снабжен дополнительным входом, постоянные дроссели выполнены в виде сопел, а заслонка - в виде двух колец, расположенных с торцов поршня и жестко связанных с ним, причем дополнительный вход каждого из дискриминаторов сигна-ла и приемные сопла выведены в pa6oi чие полости, при этом приемные сопла расположены соосно постоянным дросселям. На чертеже представлена конструктивная схема привода. Позиционный гидропривод (пневмопривод) содержит цилиндр 1 с размб- щенным в нем поршнем 2 со штоком 3 с образованием рабочих полостей 4 и 5, сообщенных через постоянные дроссели , выполненные в виде сопел 6 и 7 с магистралью 8 нагнетания, а через сливные отверстия 9-12, расположенные на цилиндре 1, и клапаны 13-16 с магистралью 17 слива, датчики поло жения, включающие заслонку, выполнен ную в виде двух колец 18 и 19, расположенную с торцов 20 и 21 поршня 2, приемные сопла 22 и 23, подключенные к соответствующим входам 2k и 25 дискриминаторов 26 и 27 сигнала. Дискриминаторы 26 и 27 сигнала снабжены дополнительными входами 28 и295 сообщенными отверстиями 30 и 31 с рабочими полостями и 5. Прием ные сопла 22 и 23 выведены в рабочие полости 4 и 5 и расположены соосно соплам 6 и 7, а отверстия 30 и 31 расположены приемных сопел 22 Сопла 6 и 7, приемные сопла 22 и 23 совместно с кольцами 18 и 19 образуют струйный датчик крайнего положения поршня 2, при этом гидравлические сопротивления сопел 6 и 7 и приемных сопел 22 и 23 равны. Гидропривод (пневмопривод) работает следующим образом. Из магистрали 8 нагнетания и сопел 6 и 7 рабочее тело подается в рабочие полости k и 5.,Струя рабочего тела, вытекающая из сопел 6 и 7 образует в приемных соплах 22 и 23 сигнал, рав ный полному давлению (статическое дав ление плюс скоростной напор). При открытии одного из клапанов, например 1, рабочее тело из рабочей ролости 4 через сливное отверстие 10 поступает в магистраль 17 слива. Вследствие различия гидравлических сопротивлений питания рабочего тела от магистрали В нагнетанияв магистраль 17 слива в рабочей полости 5 устанавливается давление, превышающее давление в рабочей полости . Под действием перепада давления в рабочих полостях 4 и 5 поршень .. 2 со штоком 3 перемещается в сторону открытого отверстия 10 и перекрывает его. В результате слив рабочего тела из рабочей полости k ограничивается, давление в ней растет и достигает зна
чения, при котором движущая сила становится равной нулю и поршень 2 устанавливается в положение фиксации. S
и нагнетания, цилиндр с размещенным в нем поршнем с образованием рабочих полостей, сообщенных через постоянные S4 Когда поршень 2 находится в положениях, отличных от крайнего верхнего и крайнего нижнего (по чертежу), в приемные сопла 22 и 23 поступает сигнал, который превышает статическое давле-. ние в рабочих полостях 4 и 5. Таким образом, на дифференциальных дискриминаторах 26 и 27, один вход которых 2 и 25 соединен с приемными соплами 22 и 23. а другой - с соответствующими рабочими полостями и 5 через отверстия 30 и 31, создается сигнал, равный разности давлений в приемном сопле 22 (23) и рабочей полости k (5). С приходом поршня 2, например, в крайнее нижнее (по чертежу) положение, кольцо 19 устанавливается между соплом 7 и приемным соплом 23. Струя рабочего тела, поступающего из сопла 7, затормаживается на кольце 19, ив приемное,сопло 23 поступает сигнал, равный давлению в рабочей полости 5. При этом на дифференциальном дискриминаторе 27 сигнала разность давлений на его входах 25 и 29 отсутствует, и сигнал не создается, что свидетельствует о приходе поршня 2 в положение, где установлен датчик положения. Таким образом, выполнение дискриминатора сигнала дифференциальным и обеспечение питания приемных сопел за счет энергии ср абатывдемой на постоянных дросселях, выполненных в виде сопел, исключает.отдельную систему питания, делает привод проще и надежнее. Кроме того, размещение элементов датчика положения непосредственно в рабочих полостях при жесткой связи заслонки с поршнем исключает наличие дополнительных уплотнений и пружин. Положительный эффект от использования технического решения состоит в повышении экономической эффективности и повышенной чувствительности, что позволит расширить область применения устройства. Формула изобретения Позиционный гидропривод (пневмопривод), содержащий магистрали слива
