(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСИ ВРАЩЕНИЯ РОТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения положения оси вращения ротора | 1981 |
|
SU977965A1 |
| Способ определения положения оси вращения ротора | 1982 |
|
SU1163168A1 |
| Устройство для определения положения оси вращения ротора | 1983 |
|
SU1249357A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| Устройство для определения положения оси вращения ротора | 1989 |
|
SU1654705A1 |
| Стенд линейных ускорений | 1975 |
|
SU583398A1 |
| Комбинированная система ориентации и навигации подвижного объекта | 2020 |
|
RU2746236C1 |
1
Изобретение относится к измерительной технике и может быть использовано, например, для определения оси вращения платформы центробежной машины при измерении величины перегрузки, дeйctвyющeй на испытуемое изделие, установленное на вращающейся платформе.
Известен способ определения положения оси вращения ротора, заклюмающийся в том, что устанавливают ротор на шпиндель, вращающийся в опорах, и определяют положение оси вращения ротора по положению оси вращения шпинделя ГП.15
Недостатком способа является необходимость установки измеряемого ротора на дополнительный шпиндель,что снижает томность определения оси вращения ротора.
Наиболее близким к изобретению по технической сущности является способ определения положения оси врдадения ротора, зключающийся в том, что с
помощью датчика перегрузок измеряют линейные перегрузки при вращении ротора и по их значению судят о положении оси вращения. Этот способ применяется в роторах типа центрифуг, предназначенных для испытаний имитирующих воздействие линейных перегрузок на испытуемое изделие, и состоящих из платформы и шпинделя 2.
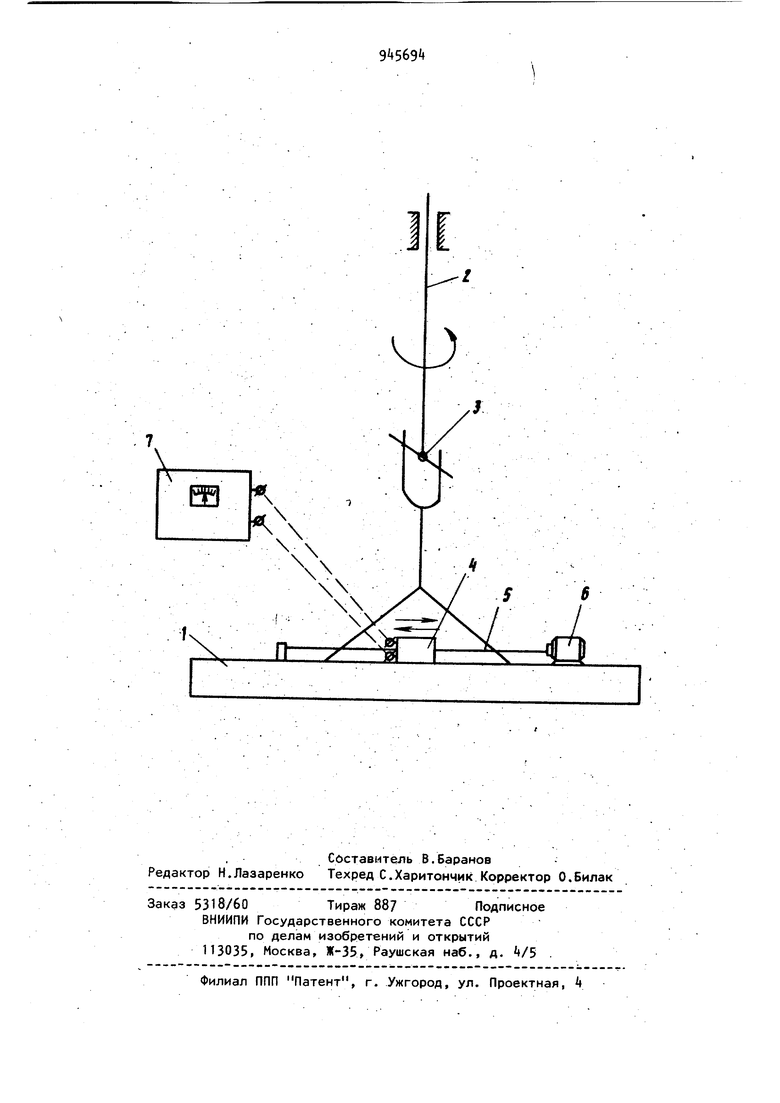
Недостатком способа является то, что при испытаниях допускается значительная погрешность в определении координат оси вращения, а следовательно, вносится погрешность в определение величины перегрузки, действующей на испытуемый ротор. Указанная погрешность обусловлена наличием зазоров в месте соединения платформы со шпинделем, что приводит к отклонению оси вращения платформы от положения оси шпинделя и затрудняет определение координат действительной оси вращения. Цель изобретения - повышение точности измерения.Эта цель достигается тем, что устанавливают в- геометрическом центр ротора датчик перегрузок, перемещают при вращении ротора датчик перегру.зок в плоскости, перпендикулярной оси вращения, до достижения нулевых показаний И по месту нахождения ц«нтра масс груза чувствительного элемента датчика судят о положении оси вращения роторе. На чертеже предст.авлено устройств ;ДЛя реализации данного способаприме нительно к испытаниям, имитирующим воздействие линейных перегрузок на испытуемый ротор. В геометрической оси ротора, выпо ненного в виде платформы 1, имеющей возможность вращения вокруг вертикальной оси, шпинделя 2 и связывающег их шарнирного механизма 3, устанав{ливают датчик k перегрузок таким образом, чтобы его ось чувствительност ыла направлена по радиусу платформы 1. Датчик Ц перегрузок имеет возможность перемещаться по радиусу платформы в обоих направлениях путем вра щения ходового винта 5 от электродвигателя 6. Сигналы датчика перегрузок регистрируются измерительным прибором 7. Сущность способа заключается в то что в геометрическом центре вращающе гося ротора предварительно устанавливают датчик перегрузок, чувствител ная ocbl oToporo направлена по радиус платформы, приводят ротор во вращение и, перемещая датчик перегрузок в плоскости, перпендикулярной оси вращения ротора, .добиваются сигнала датчика, соответствующего нулевой перегрузке, после чего вращение прекращают и положение действительной ОСИ вращения ротора определяют по ма ту нахождения центра массы груза чув ствительного элемента датчика перегрузок, отмеченного на датчике меткой.. Способ осуществляется следующим образом. С помощью электродвигателя 6 приводят во вращение шпиндель 2 с платформой 1 и закрепленным на ней в гео метрическом центре датчиком k перегрузок. После вывода платформы на обороты подают напряжение на электро 9 4 Двигатель 6, который вращает ходовой винт 5, перемещая датчик перегрузок 4 в радиальном направлении по платформе 1. Меняя полярность питания электродвигателя 6, изменяется направление вращения ходового винта 5 и, тем самым , изменяется направле- i ние перемещения дaтчикiэ i перегрузок. При этом контроль сигнала датчика перегрузок осуществляется по измерительному прибору 7. Уменьшение уровня сигнала свидетельствует о том, что датчик перегрузок приближается к действительной оси вращения платформы и наоборот. При достижении уровня сигнала датчика k перегрузок, соответствующего нулевой перегрузке, его перемещение прекращают и останавливают вращение платформы 1. При этом место нахождения центра массы груза чувствительного элемента датчика А перегрузок соответствует- положению оси вращения платформы. . Применение описанного способа позволяет с высокой точностью находить положение действительной оси вращения платформы, а следовательно и величину перегрузок, действующих на испытуемое изделие. Формула изобретения Способ определения положения оси вращения ротора, заключающийся в том, что с помощью датчика перегрузок измеряют линейные перегрузки при враще-. НИИ ротора и по их величине судят о положении оси вращения, отличающийся тем, что, с целью повышения Точности измерения, устанавливают в гeoмeтpИJчecкoм центре ротора датчик перегрузок, перемещают при вращении ротора датчик перегрузок в плоскости, перпендикулярной оси вращения, до достижения нулевых показаний и по месту нахождения центра масс груза чувствительного элемента датчика судят о положении оси вращения ротора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР If 303288, кл. G 01 М 1/12, 1970. 2.Савельев И.В, Курс общей физики. М., Наука, 1970, т.1., с.162-166 (прототип).
J
