(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСИ ВРАЩЕНИЯ РОТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения положения оси вращения ротора | 1979 |
|
SU945694A1 |
| Способ определения положения оси вращения ротора | 1982 |
|
SU1163168A1 |
| Устройство для определения положения оси вращения ротора | 1983 |
|
SU1249357A1 |
| Устройство для определения положения оси вращения ротора | 1989 |
|
SU1654705A1 |
| СПОСОБ ЗАЩИТЫ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ ГИРОСКОПА КРЕНА УПРАВЛЯЕМОГО БОЕПРИПАСА ОТ ДЕЙСТВИЯ СТАРТОВЫХ ПЕРЕГРУЗОК, УПРАВЛЯЕМЫЙ БОЕПРИПАС ДЛЯ ЕГО РЕАЛИЗАЦИИ И СПОСОБ ЕГО СБОРКИ | 2006 |
|
RU2308671C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ДИНАМИКИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2273013C1 |
| Способ определения коэффициентов калибровки интегрированного блока датчиков | 2017 |
|
RU2655053C1 |
| Тренажер для подготовки пилота | 2015 |
|
RU2610318C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПУСКА БОЕПРИПАСА ЕГО БОРТОВЫМ ДАТЧИКОМ ДО СТАРТА ПРИ ОТСУТСТВИИ ЭЛЕКТРОПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2224204C1 |
| Устройство для определения положения оси вращения ротора | 1987 |
|
SU1453197A2 |
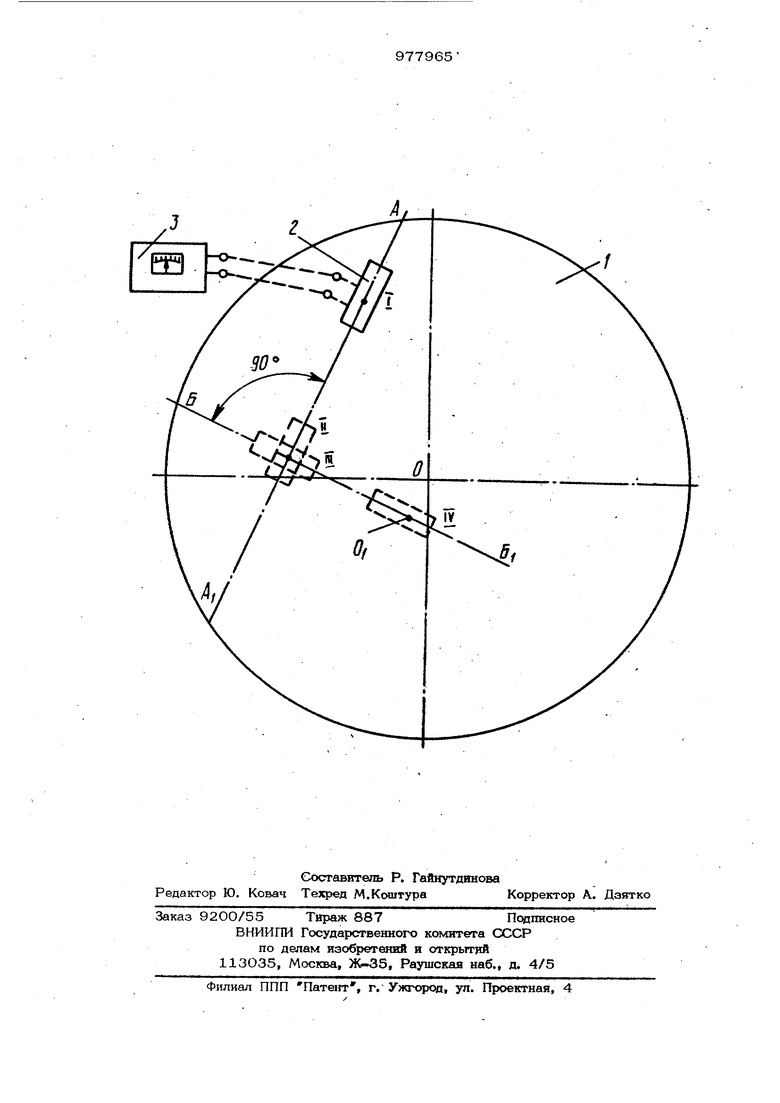
Изобретение относится к измерительной технике и может быть использовано, например, для определения оси вращения плaтфqpмь центробежной машины при измерении величины перегрузки, действующей на испытуемое изделие, установленн на вращающейся платформе. Известен способ определения положения оси вращения ротора, заключающийся в том, что на полость ротора устанавл вают датчик, с помощью датчиков измеря ют линейные перегрузки, действующие на ротор в процессе его вращения, и по их значению судят о положении оси вращения ротора С 1 . Наиболее близким к предлагаемому является способ сжределения положения оси вращения ротора, заключающийся в том, что на полость ротора в его геометрическом центре устанавливают naiw чик перегрузок, приводят ротор во вращение, перемещают датчик по полости ротора в направлении, перпендикупярнс оси вращения ротора, до достижение нулевого уровня сигнала датчика перегрузок и по месту нахождения центра масс груза чувствительного элемента датчика судгг о положении оси врющения ротора t2l. Однако данные способы характеризуются недостаточной точностью. Это cBjtfзано с тем, что о положении оси вращения ротора судят лшиь по одному параметру датчика перегрузок. Цепь изобретения - повышение точноо ти. Поставленная цель достигается тем, что согласно способу определения положения оси вращения goropa, заключающемуся в том, что на плоскость р(этора устанавливают датчик перегрузок, привод51т ротор во вращение, перемещают датчик по плоскости ротора до достижения нулевого уровня сигнала датчика перегрузок, по которо му судят о положении оси вращения ротора, датчик перегрузок устанавливают в произвольней месте, после перемещения его до достижения нулевого уровня снгнапа датчика перегрузок последний поворачиБают на 9О° в плоскости рбтора и повторно перемещают датчик перегрузок в этом направлении до достижения нулевого уровня сигнала датчика. На чертеже изображена схема, поясняющая предлагаемый способ. Способ определения положения оси вращения ротора осуществляется сл&дующим образом. В произвольном месте на плоскости ротора 1, которая перпендикулярна оси его вращения, устанавливают датчик 2 перегрузок в произвольном направлени АА оси его чувствительности. Приводят ротор 1 во вращение и на постоянных оборотах перемещают датчик 2 по направ лепию АА-, из положения I в положение if . При этом уровень сигнала датчика 2 который регистрируется измерительным прибором 3, связанным с датчиком 2, уменьшается н в положении М достигает нулевого уровня сигнала, соответствующе нулевой перегрузке. С становиБ ротор 1, поворачивают датчик 2 на угол 90°в плоскости ротора 1, но он занимает положение Ш. Приводят платформу во вращение при тех же оборотах и перемешают датчик 2 в направлении ББ/, до положения fV , при котором сигнал датчика 2 соответствует нулевой перегрузке. Прекращают перемещение датчика 2 и останавливают врашешге ротора 1. При этом место нахождения центра масс груза чувствительног элемента датчика 2 перегрузок соответтвует действительно положению оси ращения ротора 1. Предлагаемый способ позволяет с досаточной точностью судить о положении си вращения ротора за счет того, что то определение производится по двух- координатной системе. Формула Изобретения Способ определения положения оси вращения ротора, заключающийся в том, что на плоскость ротора устанавливают атчик перегрузок, приводят ротор во вращение, перемешают датчик по плоскости ротора до достижения нулевого уровня сигнала датчика перегрузок, по которому судят о положении оси вращения ротора, отличающийся тем, что, с целью повыщения точности, датчик перегрузок устанавливают в произвольном месте, после перемещения его до достижения нулевого уровня сигнала датчика перегрузок последний поворачивают на 90 в плоскости ротора и повторно п. ремещают датчик перегрузок в этом направлении до достижения нулевого уровня сигнала датчика. Источники информации, принятые во внимание при экспертизе 1.Савельев И. В. Курс общей физики. 4., Наука, т.1, 1970,с. 162-166. 2.Авторское свидетельство СССР по заявке № 2789614/28, кл.С,01М 1/12, 1979, (прототип).
