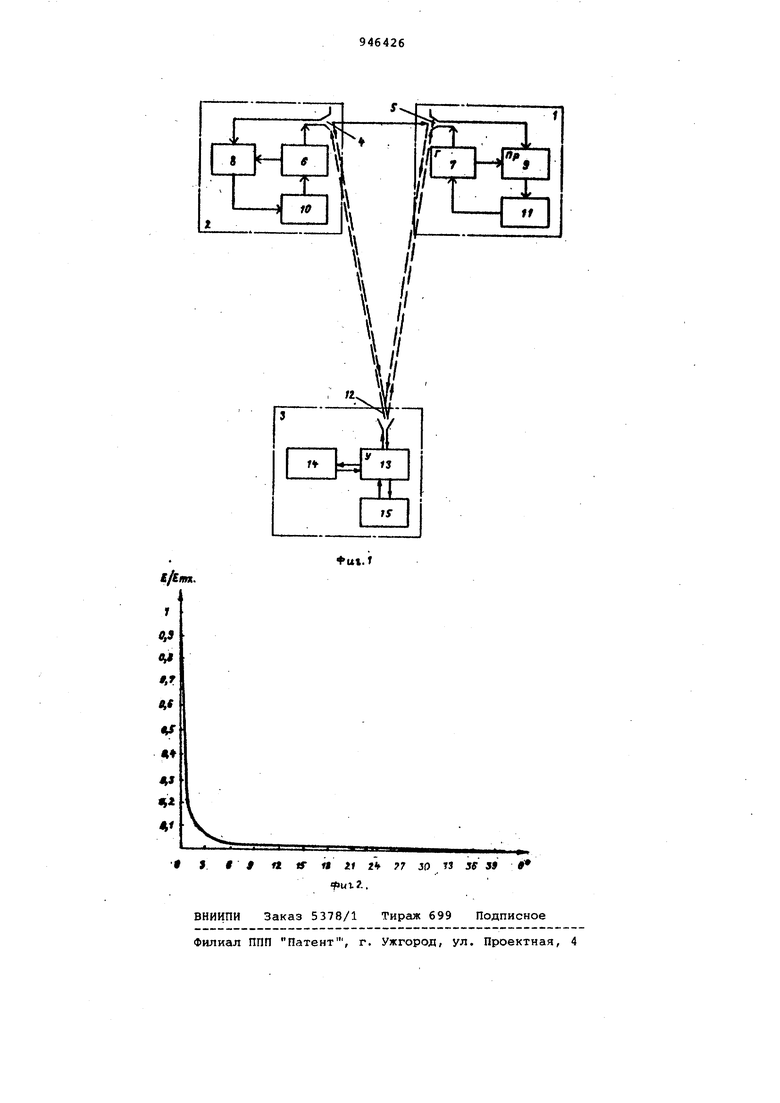
Способ относится к тракторному и сельскохозяйственному машиностроению, в частности к производственным процес сам, выполняемым мобильными сельскохо зяйственными машинами, включая системы технологической обработки почвы и растений. Он может быть использован в строительстве, на угольных карьерах и т.п., там, где необходимо связать процесс автовождения движущихся объектов с производственным процессом пе ремещения рабочего органа агрегатируемой машины на открытой площадке, снабженной опорными навигационными точками и характеризуемой определенны рельефом. Р звестен способ автовождения движущихся объектов путем радионавигации включс1ющий выработку сигнала ошибки текущих координат их движения относительно заданных 11. К недостаткам радионавигационной системы управления движущимся объектом . следует отнести отсутствие взаимосвязи выработки сигнала управления движения объекта и технологическим процессом вследствие определения толь ко плановых текущих координат объекта (без учета рельефа) и разобщенности процессов, Известен способ автовождения сельскохозяйственных агрегатов, включающий выработку сигнала ошибки текущих координат их положения относительно заданных, по которомг осуществляют управляющее воздействие Г23. Основные недостатки зтого способа- низкая точность выработки сигнала управления (сигнала О1шбки) при отклонении движения трактора от заданной траекторииf отсутствие возможности решения задачи выработки сигнала, обеспечивающего управление разворотом машинно-тракторного агрегата в начале и конце гона с помощью индукционного поля. Цель изобретения - осуществление комплексной автоматизации управления сельскохозяйственными агрегатами и технологическими процессами обработки почвы и растений. Поставленная цель достигается тем, что в способе автовождения сельскохозяйственных агрегатов дополнительно производят выработку сигнала ошибки текущих координат положения рабочих органов, причем выработку сигналов ошибок текущих координат положения сельскохозяйственного агрегата и рабочих органов осуществляют путем радионавигации относительно одних и тех же навигационных точек. На фиг, 1 представлена функционал ная схема автоматизации управления вождением машинно-тракторного агрегата и технологической обработки поч вы; на фиг. 2 - угломестная диаграмма направленности базовой антенны. Схема содержит командный пункт 1 опорный пункт 2 и машинно-тракторный агрегат 3 с органами технологической обработки почвы. Опорный и командный пункты снабжены базовыми антеннами 4 и 5 соответственно, которые соединены с генераторами 6 и 7 сигналов и приемниками 8 и 9. Опорный пункт снабжен также системой 10 выработки и передачи данных о дальности до машинно-тракторного агрегата, которая соединена с генератором б сигналов и приемником 8 и имеет выход на антенну 4. Командный пункт снабжен системой 11 обработки и передачи данных управления и контроля работы машИнно-тра тор :ого агрегата и рабочих органов, которая соединена с ганератором 7 сигналов и приемником 9 и имеет выход на антенну 5. Машиннотракторный агрегат 3 снабжен антенной 12, которая соединена с усилителем 13 высокой частоты, а он, в свою очередь, с датчиками 14 управления и контроля машинно-тракторного агрегата и 15 рабочих органов технологической обработки почвы. Комплексную автоматизацию управления, вождением машинно-тракторного агрегата и технологической обработкой почвы осугдествляют следующим образом. Возбуждают электромагнитные поля перемещающихся в пространстве стоячи волн между каждой из базовых антенн 4 и 5 и антенной 12 на машинно-тракторном агрегате. Для этого с помощь генератора б сигналов и антенны 4 на опорном пункте 2, а также с помощью генератора 7 сигналов и антенны 5 на командном пункте 1 излучают сигналы с вертикальной поляризацией на частотах f, , f/j / соответственно. Эти сигналы принимают антенной 12 на машинно-тракторном агрегате 3, усиливают в усилителе 13 высокой частоты и переизлучают антенной 12 в гоирзонта.льной поляризации. Эти эхо-сигналы принимают базовыми антеннами 4 и 5 и направляют соответственно в приемники 8 и 9 на опорном 2 и командном 1 пунктах. На вход приемников осу1дествляют сложение части излучаемого сигнала и принимаемого эхо-сигнала (падающую и отраженную волны), т.е. получают стоячую волну. Изменение частот , излучаемых сигналов во времени позволяет получить на В7:оде приемников, в специальной линии связи перемещающиеся в пространстве стоячие волны. Слабую зависимость уровня эхо-сигналоз от 1асстояния получают с помощью антенн 4и 5, формирующих диаграммы направленности (фиг. 2). Подсчитывая число перемещающихся стоячих волн относительно базовых антенн 4 и 5 определяют расстояние от каждой из них до антенны 12. Расстояние, соответствующее числу переместившихся полуволн, представляет собой в процентном отношении ту часть искомого расстояния между антеннами 4 и 12 (или 5 и 121 , которая определяется процентным изменением частоты излучаемых сигналов f (или f2)/ Так, например, в случае изменения частоты f на 1% и перемещения стоячей волны при этом (определение подсчетом числа полуволн, переместившихся относительно антенны 5) на 10 м, расстояние между антенками 5и 12 равном 10 м : 0,01 1000 м. Запишем излучаемую, падающую волну в виде: кх) . где круговая частота; К - волновое число К - , где С - скорость света. Тогда отраженная от антенны 12 е-Е. При сложении падающей и отражающей волн на входе приемника имеет место стоячая волна (при равенстве амплитуд Е и Eq ). Изменяя частоту генератора по законуUO + UUJt, , получаем перемещающуюся в пространстве стоячую волну Г ы 4-ашь е u) Eoos |() ,E,.,..ii-f )(:.«). и)+4Ш (t--) Ее особенностью является высокая точность измерения расстояний, обус овленная переходом от высокоточного змерения фазы, свойственного фазовым етодам, к измерению числа а тлитудно-модулированных импульсов (пиков гибающей) перемещающейся в пространтве стоячей волны. Отметим, что отичие амплитуд падающей и отраженной олн на 10 дб, вполне допустимо, одако приведет к необходимости увелиения чувствительности приемника. Следующим этапом определяют сигна ошибку. Для этого текущие данные о дальности между антеннами 4 и 12 передают от системы 10 опорного пункта на командный пункт. Эти данные вместе с текущими даннЕлми о дальности между антеннами 5 и 12 сравнивают с опорными даннЕлми заранее проведенно го или аналитически записанного требуемого перемещения машинно-тракторного агрегата. Выработанный сигналошибки преобразуется в управляющий сигнал и модуляцией той же стоячей волны передается на машинно-тракторный агрегат. Управление технологическим процес сом осуществляют, используя датчики 15 рабочих органов технологической обработки почвы. Технологическую обработку многолетних растений производят описанным выше способом, используя опорные координаты растений. Их записывают заранее, например, на магнитную плен ку, путем поочередной установки анте ны (рупора) 12 у каждого из растений а затем получают возможность многократного использования. Экономическая эффективность спосо ба является результатом его техничес кой сущности и характеризуется небол шим количеством требуемой аппаратуры высокой точностью измерений и надежностью . Основной состав требуемой аппаратуры представляет собой антенны базовые и на объекте, генераторы, предпочтительно твердотельные, усилители высокой частоты, предпочтител но на туннельных диодах, усилители высокой частоты типа УЗ-33 вместо приемников. Обработка информации минимальная, так как дальность получают просты подсчетом числа полуволн перемещающейся стоячей волны с помощью электронного счетчика и частотомера . На фоне зтих, сравнительно небольших, затрат большой положительный эффект реализуется от повышения точности выполнения агротехнических требований обработки почвы и растений, сокращения времени уборки урожая, сокращения численности рабочей силы, т.е. от повышения производительности труда культуры сельскохозяйственного производства и унифицированного подхода к автоматизации управления различными процессами. Формула изобретения Способ автовождения сельскохозяйственных агрегатов, включающий выработку сигнала ошибки текущих координат их положе ия относительно заданных , по которому осуществляют управляющее воздействие, о т л и ч а ющ и и с я тем, что, с целью осуществления, комплексной автоматизации управления сельскохозяйственными агрегатами и технологическими процессами обработки почвы и растений, дополнительно производит выработку сигнала ошибки текущих координат положения рабочих органов, причем выработку сигналов ошибок текущих координат положения сельскохозяйственного агрегата и рабочих органов осуществляют путем радионавигации относительно одних и тех же навигационных точек. Источники информации, принятые во внимание при экспертизе 1.Одинцов В. А. Радионавигация летательных аппаратов, М.,1968, с. 8. 2.Материалы объединенного межведомственного совета. Госкомитет Совета Министров СССР по науке и технике. М., 1976, с. 22-24.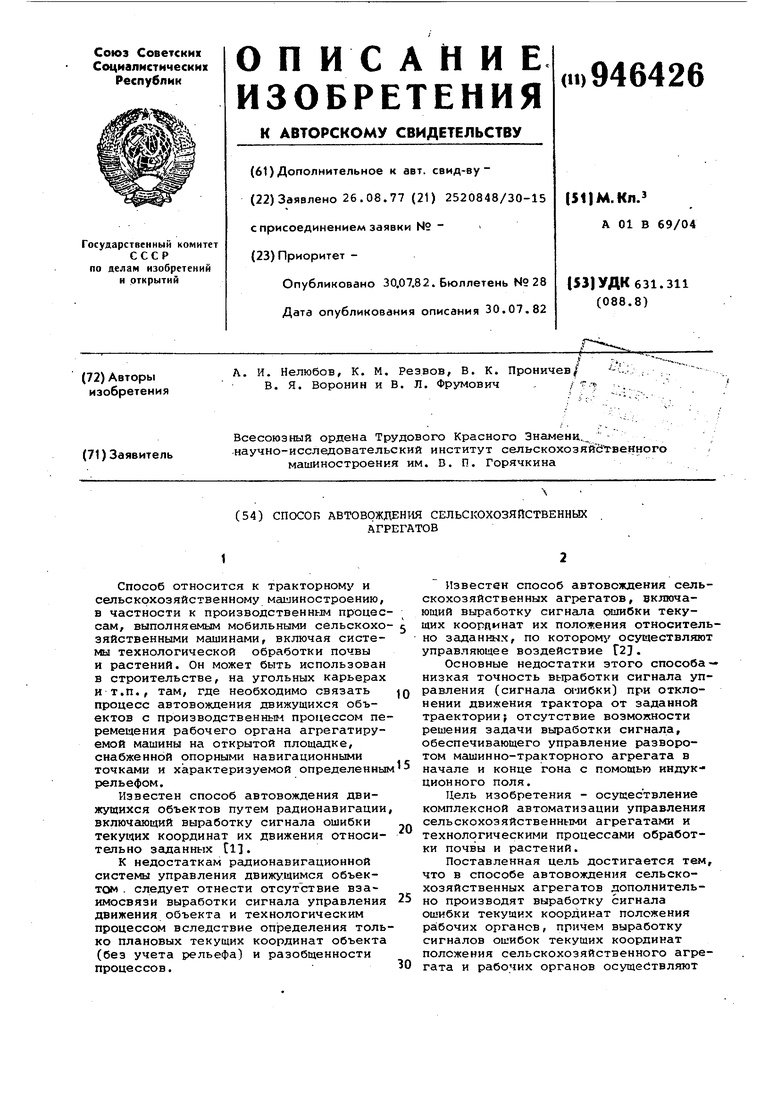
| название | год | авторы | номер документа |
|---|---|---|---|
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Способ вождения мобильных сельскохозяйственных агрегатов | 1984 |
|
SU1274637A1 |
| Устройство для измерения дальности до управляемого машино-тракторного агрегата | 1977 |
|
SU676201A1 |
| Способ определения дальности при автовождении машинно-тракторного агрегата | 1991 |
|
SU1793833A3 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| Устройство для измерения дальности до управляемого машинно-тракторного агрегата | 1984 |
|
SU1279549A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| Способ программирования траектории движения сельскохозяйственных агрегатов | 1976 |
|
SU751343A1 |
| Способ управления движением машинно-тракторного агрегата | 1986 |
|
SU1671180A1 |
| Устройство для определения координат машинно-тракторного агрегата | 1990 |
|
SU1701137A1 |