о VJ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения дальности до управляемого машинно-тракторного агрегата | 1984 |
|
SU1279549A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАШИННО-ТРАКТОРНОГО АГРЕГАТА НА ПОЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2171461C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ ТРАКТОРА | 2015 |
|
RU2600002C1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| Электроиндукционная система местоопределения самоходных машин | 2024 |
|
RU2831279C1 |
| ИНДУКЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА НАХОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670490C1 |
| Способ вождения мобильных сельскохозяйственных агрегатов | 1984 |
|
SU1274637A1 |
Изобретение позволяет повысить точность управления машинно-тракторного агрегата (МТА) по заданной траектории. МТА 1 выводится в начальную точку движения по заданной траектории (ЗТ) 6. Приемопередающая аппаратура, установленная на МТА 1, и ретранслятор 2 формируют эл.-магн. поле, представляющее собой ряд фазовых дорожек. При движении МТА 1 определяют текущие дальности до двух опорных точек (ОТ), разнесенных на известное расстояние, в которых расположены соотв. антенны 3, 4. Первоначально движение МТА 1 осуществляется по дуге окружности радиусом Д 1-1 с центром в первой ОТ пространства, в которой расположена антенна 3. По определяемым текущим дальностям до антенн 3, 4 и известному расстоянию между ними рассчитывают собственное положение МТА 1. ВЫЧИСЛЯЕТСЯ РАЗНОСТЬ МЕЖДУ ТЕКУЩЕЙ ДАЛЬНОСТЬЮ И ОЖИДАЕМОЙ ПРИ ДВИЖЕНИИ ПО ЗТ 6 ДАЛЬНОСТЬЮ ДО ВТОРОЙ ОТ, В КОТОРОЙ РАСПОЛОЖЕНА АНТЕННА 4. ПРИ ПРЕВЫШЕНИИ ЭТОЙ РАЗНОСТЬЮ ДОПУСТИМОЙ ВЕЛИЧИНЫ ФОРМИРУЮТ СИГНАЛ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МТА 1. Этот сигнал пропорционален величине отклонения текущей дальности МТА 1 до антенны 3 от новой линии постоянной дальности, которая представляет собой окружность с другим радиусом ДI-1 с центром в первой ОТ. Т. обр., управление обеспечивает движение МТА 1 по корректируемой линии, равной дальности относительно первой ОТ. 1 ил.
Изобретение относится к сельскохозяйственной технике и может быть использовано при выполнении работ в сельском хозяйстве, а также в тех областях, где требуется обеспечить движение машинно-трак- торного агрегата (МТА) по заданной траектории.
Цель изобретения - повышение точности управления движением машинно-тракторного агрегата по заданной траектории.
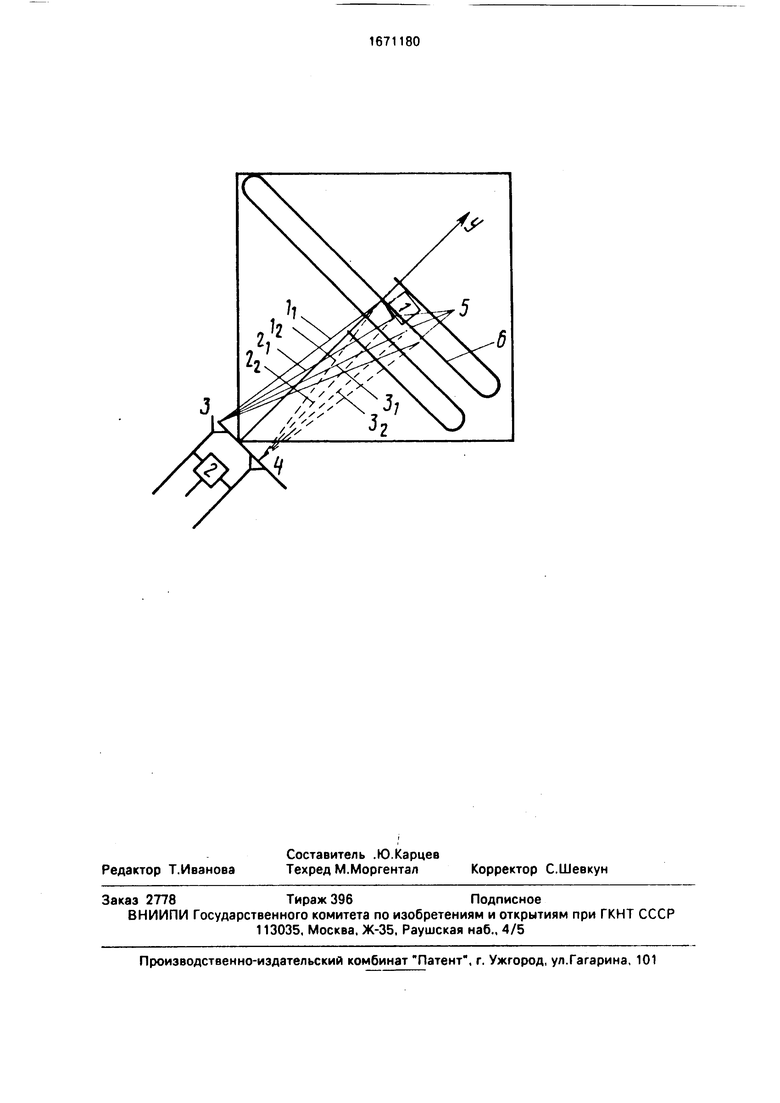
На чертеже представлена структурная схема устройства, реализующего способ управления движением МТА по заданной траектории.
Устройство содержит машинно-тракторный агрегат 1 с бортовой станцией, ретранслятор 2, первую 3 и вторую 4 антенны. На чертеже обозначены: 5 - линии постоянной дальности относительно первой опорной точки пространства; 6 - заданная траектория движения.
со
О
Устройство работает следующим образом.
МТА 1 выводится в начальную точку движения заданной траектории. Приемопередающая аппаратура МТА 1 и ретранс- лятора 2 формирует электромагнитное поле, представляющее собой стоячую электромагнитную волну (ряд фазовых дорожек). Первая 3 и вторая 4 антенны размещены в первой и второй опорных точках пространства соответственно, разнесенных на известное расстояние.
На МТА 1, после начала движения, определяют текущие дальности DM, D2-1, Оз- 1...; Di-2, Da-2,, Оз-2... до первой 3 и второй 4 антенны соответственно. Формируют сигнал управления движением МТА 1 пропорциональный величине отклонения текущей дальности D2-1, Оз-1... МТА 1 до первой антенны 3 от линии постоянной дальности 5, которая представляет собой окружность радиусом DM с центром в первой опорной точке. Таким образом, первоначально движение МТА 1 осуществляется по дуге окружности радиусом DM с центром в первой опорной точке пространства.
По определяемым текущим дальностям D2-1, Оз-1... и Ог-2, Оз-2 ... МТА 1 до первой 3 и второй 4 антенн соответственно и известному расстоянию между антеннами 3 и 4 рассчитывают собственное местоположение МТА 1 и, используя его, вычисляют разность текущей D2-2, Оз 2... и ожидаемой (т.е. такой, которая должна быть при движении по заданной траектории) дальностей МТА 1 до второй опорной точки, При превышении этой разности, которая определяет отклонение текущего местоположения МТА 1 от заданной траектории движения 6, формируют, сигнал управления движением пропор- ционально величине отклонения текущей дальности ... D4-1, Ds-1 ... МТА 1 до первой антенны 3 от новой линии постоянной дальности, которая представляет собой окружность радиусом уже DH с центром также в первой опорной точке (D м ожидаемая дальность между МТА 1 при движении по заданной траектории и первой антенны 3 в момент превышения максимально допусти
мого отклонения от заданной траектории). Таким образом, движение МТА 1 продолжается по дуге окружности радиусом D 1-1 с центром в той же первой опорной точке пространства. Сущность такого управления заключается в движении МТА 1 по корректируемой линии, равной дальности относительно первой опорной точки пространства, т.е. по корректируемой изо- фазе.
Формула изобретения Способ управления движением машинно-тракторного агрегата, заключающийся в определении текущей дальности между машинно-тракторным агрегатом и первой опорной точкой пространства, формировании сигнала управления движением машинно-тракторного агрегата, пропорционального величине отклонения текущей дальности между машинно-тракторным агрегатом и первой опорной точкой пространства от дальности между начальной точкой движения и первой опорной точкой пространства, отличающийся тем, что, с целью повышения точности управления движением машинно-тракторного агрегата по заданной траектории, определяют текущую дальность между машинно-тракторным агрегатом и второй опорной точкой пространства, вычисляют разность текущей и ожидаемой при движении по заданной траектории дальностей между машинно- тракторным агрегатом и второй опорной точкой пространства при движении машинно-тракторного агрегата, при превышении величиной полученной разности максимально допустимой величины формируют сигнал управления движением машинно- тракторного агрегата, пропорциональный величине отклонения текущей дальности между машинно-тракторным агрегатом и первой опорной точкой пространства от ожидаемой дальности между машинно- тракторным агрегатом при движении по заданной траектории в момент превышения максимально допустимого отклонения от заданной траектории движения и первой опорной точкой пространства.
| Патент США №3396393, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
| Устройство для измерения дальности до управляемого машинно-тракторного агрегата | 1984 |
|
SU1279549A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
