Horo ПОЛЯ вдоль требуемой траектории движения, оиределеиие иапряжениости для каждого последующего ирохода осуществляют иутем ее непосредствениого измерения во время предыдущего прохода.
Измереиие и запомииаиие текущего значения напряжеиности осуществляют непрерывно в функции пути.
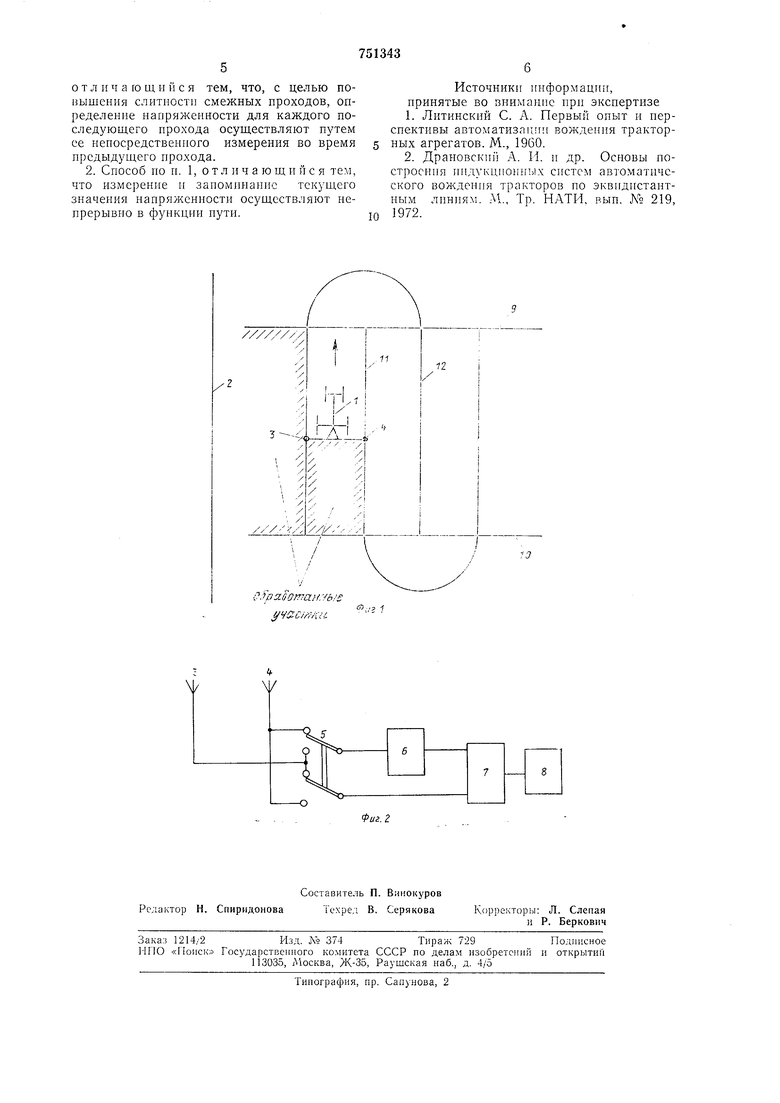
На фнг. 1 показана траектория движения агрегата ири обработке почвы «челноком ; на фиг. 2 - структурная схема системы автовождения, реализующей предлагаемый способ.
Система автовождення сельскохозяйственного агрегата 1 включает: удаленный проводник 2 с током, приемные антенны 3, 4; коммутатор 5; запоминающее устройство 6; схему 7 сравнения; регулятор 8 направления движения.
Обрабатываемый участок иоля ограничен поворотными нолосами 9 и 10. Электромагнитное поле создается током удаленного проводника 2. В процессе обработки иочвы каждый проход агрегата 1 (папрнмер, трактора с сеялкой) смещается относительно предыдущего вправо (по чертежу) на ширину захвата агрегата. На агрегате 1 устаиовлеиы приемные антенны 3 и 4 таким образом, что их траектория совпадает с траекториями крайних (слева и справа) рабочих органов агрегатируемой машииы. Выходы антенн 3 и 4 через коммутатор 5 соедииеиы со входами запоминающего устройства 6 схемы 7 сравнения, второй вход которой соединен с выходом заиоминающего устройства 6. Выход схемы 7 сравнения соединен со входом регулятора 8 наиравления движения, управляющим ру.тевым механизмом агрегата 1. При обработке иочвы «челиоком коммутатор 5 переключается в нротивоиоложное состояние после каждого разворота агрегата 1.
Способ осуществляется следующим образом.
Нусть агрегат 1 перемещается от новоротной полосы 10 к полосе 9, при это.м траектория перемещения его антенны 4 совпадает с линией И, являющейся границей между обрабатываемым и необработанным участкамн ночвы. Если коммутатор 5 находится в полол енин, показанном на фнг. 2, то выходное напряжение антеииы 4, соответетвующее наиряженности электромагнитного поля вдоль линии 11, будет запоминаться в функции иути в запоминающем устройстве 6. Если этот нроход агрегата 1 является первылм, то вожденне агрегата может осуществляться водителем.
Когда агрегат 1 достигнет поворотной полосы 9, то в запоминающем устройстве 6 системы автовождения будет находиться программа следующего прохода, запомненная в виде электрпческого сигнала, пронорцнонального напряженностн электромагинтного ПОЛЯ вдоль лннии 11 между обработанным и необработанным участками почвы, поэтому дальнейшее вожденне агрегата может осуществ;1яться автоматически. Д;1Я этого необходимо после разворота агрегата иа новоротной нолосе 9 иереключпть коммутатор 5 в нижнее (ио схеме) ноложение. В результате этого на вход схемы 7 сравнения будет ноступать выходное наиряжение антенны 4, соответствующее наиряженности электромагнитного ноля в фактическом месте нахождения агрегата, а с выхода заиомннающего устройства 6 - выходное напряжение этой же антенны, соответствующее напряженности электромагнитного поля в требуемом месте пахождеипя агрегата. Если ошибка автоволадеиия отсутствует и антенна 4 расноложена над лииией И, то на вход схемы 7 сравнения будут поступать одинаковые напряжения, и сигнал на выходе схемы сравнения будет отсутствовать. Если же агрегат отклонится в ту или другую сторону, то антенна 4 сместится с линии 11, и иа вход схемы 7 сравнения будут ноступать разные напряжения. На выходе схемы 7 сравнения ноявится сигнал ошибки автовождения, поступающий на вход регулятора 8. При этом срабатывает исполнительный механизм рулевого управления, и агрегат возвращается в требуемое иоложеине.
Одновременно с этим на вход запоминающего устройства 6 будет ноступать выходное напряжение антенны 3, неремещающейся вдоль вновь образуемой линии 12 между обработанным и необработанным участками почвы. Запоминание этого напряження обеспечивает формирование управляющего сигнала после достижения агрегатом новоротной полосы 10 и возвращения коммутатора 5 в исходное положение. Поочередное переключение коммутатора 5 после каждого разворота агрегата и запоминание выходного нанряжения внешней антенны обеспечивает последовательное смещение каждого следующего ирохода агрегата относительно предыдущего на щнрнну захвата агрегата, а также формирование сигнала ошибки автовождения.
Применение данного способа обеспечивает повышение слитности проходов и обеспечивает возможность создания на его основе универсальной системы автовождения сельскохозяйственных агрегатов.
Формула изобретения
1. Способ программирования траектории движения сельскохозяйственных агрегатов, заключающнйся в предварнтельно.м созданни в окружающем пространстве электромагнитного поля, определении и запомнианин нанряжеиности электромагнитного ноля вдоль требуемой траектории движения,
отличающийся тем, что, с целью повышения слитности смежных проходов, определенне напряженности для каждого последующего прохода осуществляют путем се непосредствеппого измерения во время предыдущего прохода.
2. Способ по п. 1, отл и ч а ю щ и и с я тем, что измерение и запоминапнс текущего значения папряженпости осуществляют пепрерывпо в функции пути.
Источники информации, принятые во внимаипе прп экспертизе
1.Литинский С. А. Первый опыт и перспективы автоматиапцпи вождения тракторных агрегатов. М., 1960.
2.Драновский А. И. и др. Основы построения ипдукционпых систем автоматического вождеиия тракторов по эквидистантным линиям. М., Тр. НАТИ, рып. N° 219, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| Способ автоматического вождения сельскохозяйственного агрегата | 1989 |
|
SU1672949A1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Индукционное устройство для групповогоВОждЕНия ТРАКТОРНыХ АгРЕгАТОВ | 1979 |
|
SU835320A1 |
| Способ автовождения сельскохозяйственных агрегатов | 1977 |
|
SU946426A1 |
| СИСТЕМА ОРИЕНТИРОВ ДЛЯ АВТОВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 1991 |
|
RU2021655C1 |
i/
7 - X1 i А I ; --хф-.
:, рз.богг;аи. fb/s i/ ycif-ff ii
Л-,у
