Изобретение относится к вспомогательному оборудованию кузнечно-прессового производства, а именно к конструкциям кузнечных манипуляторов.
Известен ковочный манипулятор, содержащий плиту, основную тележку, установленную на рельсах со смонтированными на них клином и упором, и механизм перемещения тележки, выполненный в виде приводного вала и цевочной передачи в виде цепи и рейки 1.
Недостатком известного ковочного манипулятора является то, что при ковке длинных поковок, не срабатывают конечные выключатели, а также при отключении электропитания возможен наезд ковочного манипулятора на клин под действием сил инерции и разъединение цевочной передачи, что приводит к простоям манипулятора, и, следовательно, к снижению производитбл ности.
Цель изобретения - повышение про изводительноети путем автоматизации процесса перемещения манипулятора.
Поставленнаяцель достигается тем, что ковочный манипулятор, содер дащий плиту, основную тележку, уста10новленную на рельсах со смонтированными на них клином и упором, и механизм перемещения тележки, выполненный в виде приводного вала и цевочной передачи в виде цепи и рейки, 5 снабжен дополнительной тележкой, выполненной в виде плоской обоймы с пазом и роликами, располокенными между плитой и цепью, выполненной с шагом, равным шагу цевочной рейки и одним
20 концом жесткр связанной с цевочной рейкой, а другим - посредством пружины и опоры с клином, при 9ТОЙ паз .обоймы выполнен по профилю выходной
части приводного вала основной тележки и соосно с ним.
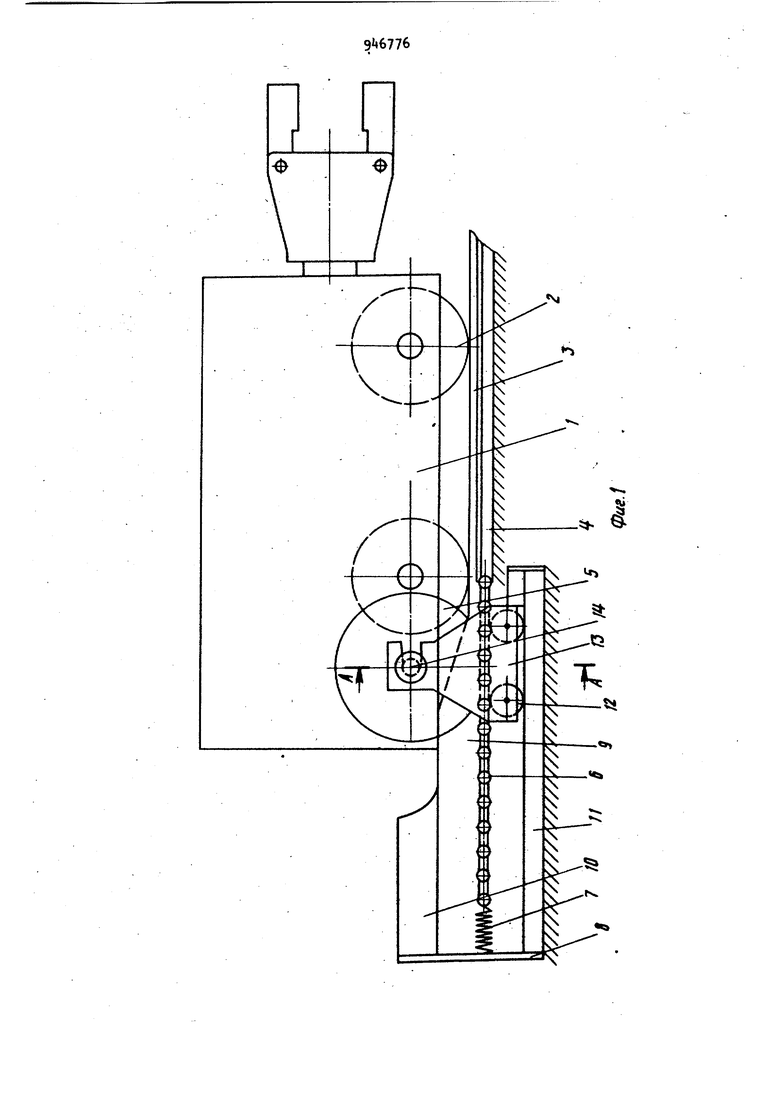
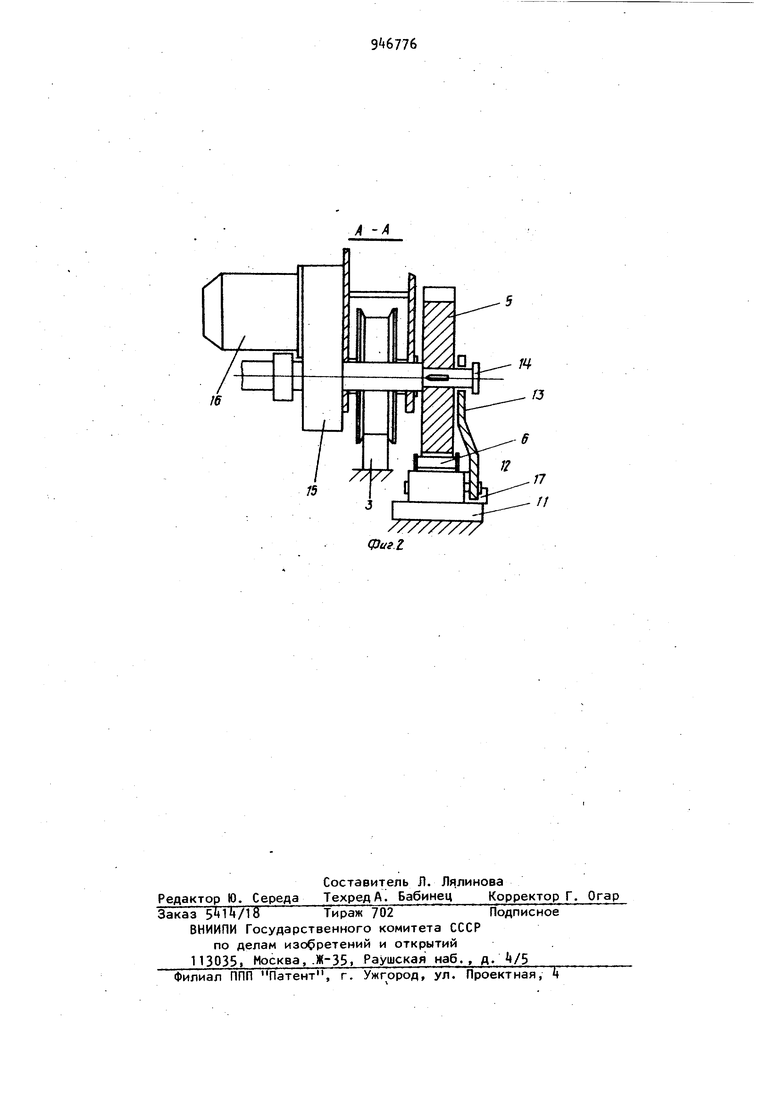
На фиг. 1 изображена схема ковочного манипулятора; на фиг. 2 - разрез А-А на фиг. 1.
Ковочный манипулятор состоит из тележки 1, манипулятора, установленной с помощью колес 2 на рельсах 3Параллельно рельсам 3 с двух сторон тележки 1 расположены две цевочные рейки 4 для перемещения тележки манипулятора с помощью цевочной звездочки 5- Конец цевочной рейки жестко соединен с одним концом цепи 6, шаг которой равен шагу цевочной рейки. Другой конец цепи с помощью пружины 7 и опоры 8, связан с клином 9 и упором 10 в конце рельсовог пути, предназначенных для остановки тележки манипулятора. Между цепью 6 и плитой 11 расположены ролики 12 дополнительной тележки, выполненной в виде плоской обоймы 13 с пзом, профиль которого совпадает с концом приводного вала 1, жестко связанного с цевочной звездочкой механизма перемещения, состоящего из-редуктора 15 и приводного двигател-я 16. Плита 11 снабжена упором 17. предназначенным для остановки дополнительной тележки при съезде манипулятора с клина.
Манипулятор работает следующим образом.
При ковке длинных поковок в режиме автоматического управления, а также при перемещении манипулятора при несраб атывании конечных выключателей или отключении электропитания возникает аварийная ситуация, при которой тележка манипулятора по действием сил инерции проходит заданный размер и задними колесами наезжает на клин 9 с упором Ю. При наезде тележки 1 на клин 9 в паз обоймы 13 входит конец приводного вала И. Это приводит к nepeMeujeнию дополнительной тележки вместе с тележкой манипулятора и подъему (эрликами 12 цепи 6, чем обеспечивается ее постоянное зацепление с цевочной звездочкой 5, так как пружина 7 позволяет цепи подниматься вверх вместе с роликами. Высота клина 9 выбирается таким образом.
чтобы при подъеме конца тележки манипулятора гасилась вся кинетическая энергия манипулятора. Упор 10 служит для остановки манипулятора
в случае неотключения привода механизма перемещения. При обратном движении ковочного манипулятора дополнительная тележка с помощью упора 17 останавливается и вал выходит из паза.
Таким образом, предлагаемая конструкция ковочного манипулятора за счет постоянного зацепления цевочной передачи механизма передвижения обеспечивает исключение простоев при ковке длинных поковок, при несрабатывании конечных выключателей, а также при отключении электропитания .путем автоматизации процесса перемещения ковочного манипулятора, что повышает производительность предлагаемого устройства по сравнению с известным.
Формула изобретения
Ковочный манипулятор, содержащий плиту, основную тележку, установленную на рельсах со смонтированными на них клином и упором, и механи перемещения тележки, выполненный в виде приводного вала и цевочной передачи в виде цепи и рейки, отличающийся тем, что, с целью повышения производительности путем автоматизации процесса перемещения манипулятора, он снабжен дополнительной тележкой,.выполненной в виде плоской обоймы с пазом и роликами, расположенными между плитой и цепью, выполненной с шагом, равным шагу цевочной рейки, и одним концом жестко связанной с цевочной рейкой, а другим посредством пружины и опоры с клином, при этом паз обоймы выполнен по профилю выходной части приводного вала основной тележки и соосно с ним.
Источники информации, принятые во внимание при экспертизе
1. Патент Великобритании № 118639 кл. В 3 Н, 1968 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Ковочный манипулятор | 1991 |
|
SU1766569A1 |
| Ковочный комплекс | 1991 |
|
SU1787639A1 |
| Ковочный манипулятор | 1932 |
|
SU42398A1 |
| ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ РАДИАЛЬНОЙ КОВКИ | 2016 |
|
RU2632752C2 |
| АВТОМАТИЗИРОВАННЫЙ МНОГОЭТАЖНЫЙ ГАРАЖ-СКЛАД И УСТРОЙСТВО ДЛЯ ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ ПОДДОНА | 2001 |
|
RU2212508C2 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Ковочный манипулятор | 1983 |
|
SU1156795A1 |
| Манипулятор | 1980 |
|
SU1003992A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| КОВОЧНЫЙ КОМПЛЕКС | 2003 |
|
RU2243056C1 |