сл
с

| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Ковочный манипулятор | 1983 |
|
SU1156795A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Подвесной ковочный манипулятор | 1978 |
|
SU706176A1 |
| Ковочный агрегат | 1980 |
|
SU889483A1 |
| Ковочный манипулятор | 1980 |
|
SU935196A1 |
| ППРГГОНПГП МЯПГИНПГТППРНИа\i'l N' ^'siv.a»oT^:MБ. А. Челищевпрессового машиностроения | 1970 |
|
SU271261A1 |
| Ковочный манипулятор | 1981 |
|
SU946776A1 |
Использование: механизация кузнечно- прессового лроизводства. Сущность изобретения: ковочный манипулятор содержит тележку, установленную посредством передних и задних колес на рельсовом пути, приводной механизм перемещения тележки по рельсовому пути и хобот с захватом, смонтированный на тележке, Приветной механизм перемещения тележки выполнен в виде балки с цапфами на концах, установленной соосно передним колесам, и стационарно установленного в проеме рельсового пути силового цилиндра, шток которого шар- нирно соединен с балкой. Ступицы передних колес, обращенные едка кдругой, выполнены с отверстиями под цапфы балки для сопряжения с ними с возможностью свободного взаимного поворота. 2 ил.
Изобретение относится к вспомогательному оборудованию кузнечно-прессового производства, а именно к конструкциям ковочных манипуляторов.
Известен ковочный рельсовый манипулятор, содержащий хобот с захватом, установленный посредством рычажной подвески на тележку, перемещающуюся по рельсовому пути механизмом продольного перемещения за счет фрикционной связи с рельсами пары ходовых колес, приводимых, как правило, от электромеханического привода. Хобот с захватом может иметь относительно тележки тоже продольные перемещения за счет собственного веса и горизонтальных амортизаторов или гидроцилиндров 1. В такой конструкции при интенсивной и динамичной работе манипулятора возможна пробуксовка приводных колес относительно рельсового
пути, что приводит к значительным нарушениям в системе управления и качестве поковок при автоматическом режиме работы манипулятора, а также вызывает интенсивный износ колес и рельсового пути.
Наиболее близким решением по технической сущности и достигаемому результату является ковочный манипулятор , содержащий хобот с захватом, смонтированный на тележке, установленной с возможностью возвратно-поступательного перемещения посредством передних и задних колес по рельсовому пути, и приводной механизм перемещения тележки 2. Особенность кинематики приводного механизма продольного перемещения тележки манипулятора - жесткое цевочное зацепление ведущих звездочек с рейками, уложенными вдоль рельсов. Преимущества цевочного зацепления по
Х|
О
о
«
«о
сравнению с зубчатым - меньшая чувствительность к нарушениям межцентрового расстояния и нёзосоряемость передачи. Ведущие звездочки и приводные высокомо ментные гидромоторы чаще всего располагаются с обеих сторон манипулятора, в его задней части, что позволяет вывести цевочные рейки из зоны продольного стола пресса, где концентрируется наиболь- шее количество окалины. К основным недо- статкам таких манипуляторов можно отнести следующие:
Наиболее гидро- и энергоемким является механизм продольного передвижения, который входит в состав подвижных частей, увеличивая массу манипулятора, тем самым снижая быстроходность и производительность, кроме того, этот механизм является определяющим для выбора параметров и размеров гидравлического объемного при- вода манипулятора, который также входит в состав подвижных частей, увеличивая их массу.
Повышенные массы подвижных частей приводят к интенсивному износу ходовой части в условиях высокоцикличных знакопеременных нагрузок механизма продольного перемещения. Открытая цевочно-реечная передача с рейками .закрепленными на фундаменте, постоянно попадает под засо- рение в условиях кузнечно-прессового цеха, что тоже способствует ее повышенному износу. Возможно рассоединение привода ведущих звездочек от цевочной рейки, если пресс резким нажатием на поковку, припод- нимает заднюю часть манипулятора.
Требуется повышенная установленная мощность электрооборудования за счет размещения всех приводов непосредственно на манипуляторе, в том числе и наиболее энергоемкого привода механизма продольного передвижения, что в свою очередь вы- зывает установку к манипулятору громоздких токоподводов и средств электропитания.
Целью изобретения является повышение производительности и надежности манипулятора за счет снижения его подвижных масс.
Поставленная цель достигается тем, что в ковочном манипуляторе, содержащем хо- бот с захватом, смонтированный на тележке, установленной с возможностью возвратно-поступательного перемещения посредством передних и задних колес по рельсовому пути, и приводной механизм пе- ремещения тележки, последний выполнен в виде балки с цапфами на концах, установленной соосно передним колесам, и силового цилиндра, корпус которого смонтирован стационарно в проеме рельсового пути по
оси манипулятора, а шток - шарнирно соединен с балкой, при этом ступицы передних колес, обращенные одна к другой, выполнены с отверстиями под цапфы балки для сопряжения с ними с возможностью свободного взаимного поворота.
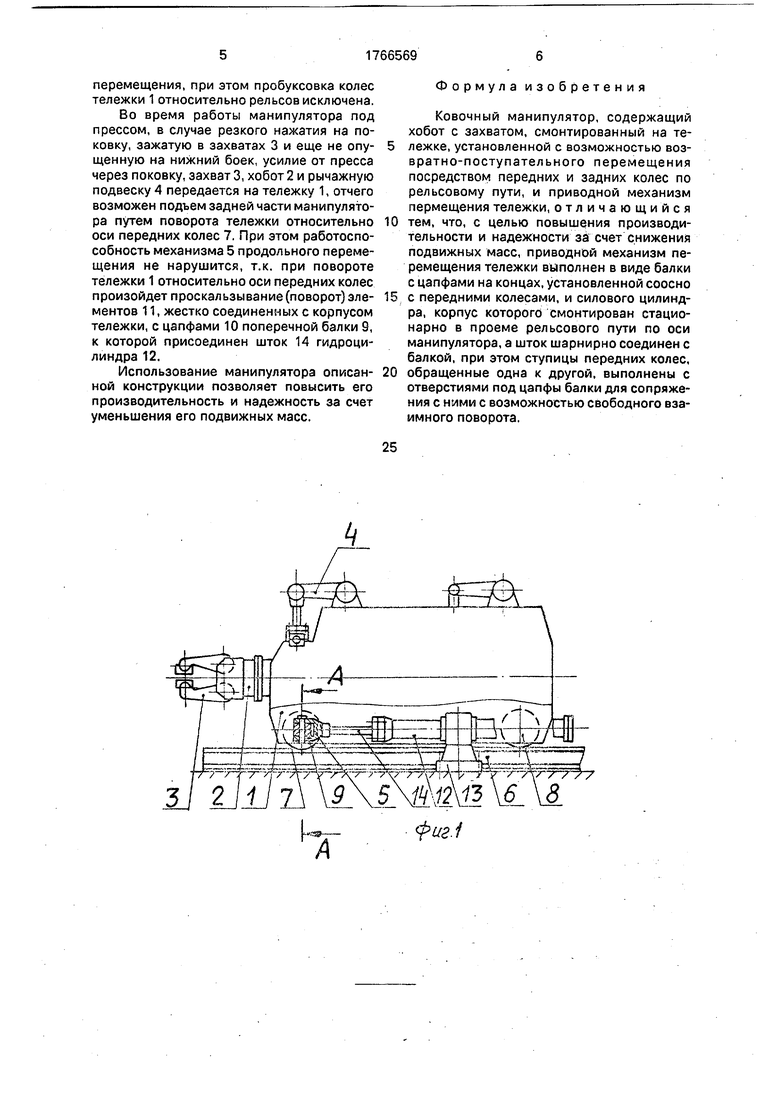
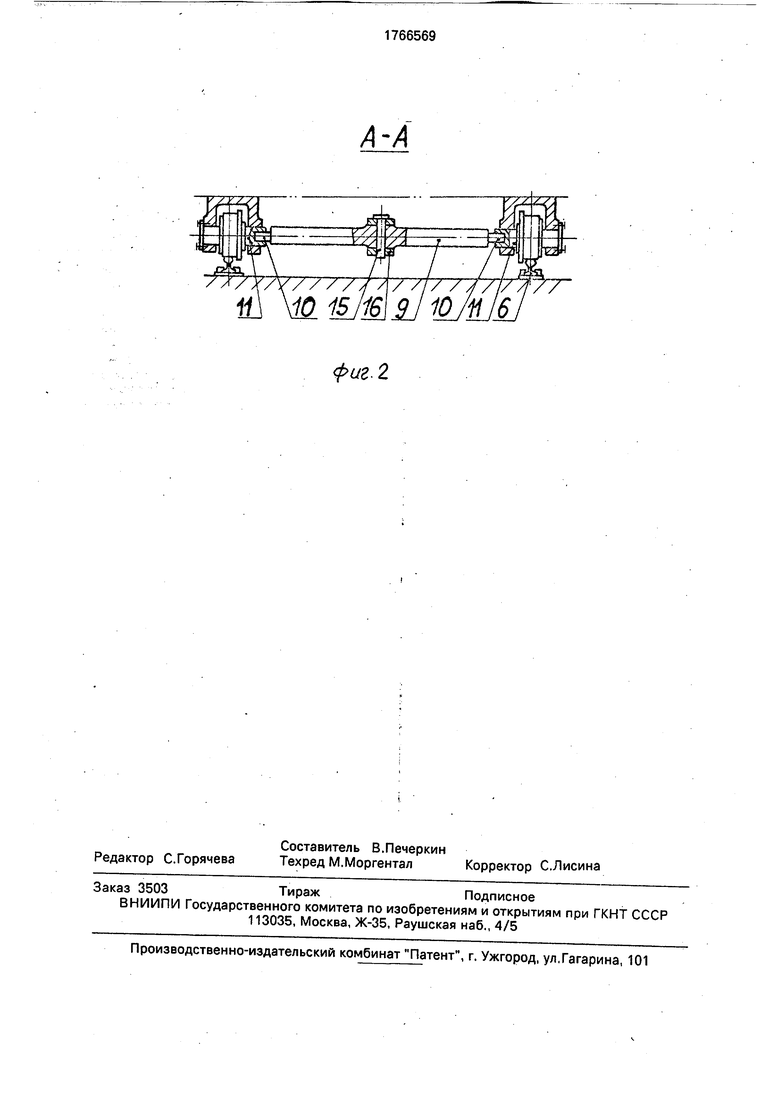
На фиг, 1 изображен ковочный манипулятор, общий вид; на фиг.2 - разрез А-А на фиг.1.
Ковочный манипулятор содержит тележку 1, хобот 2 с захватом 3, рычажную подвеску 4, механизм 5 продольного перемещения и рельсовый путь 6. Тележка имеет передние 7 и задние 8 колеса. Поперечная балка 9 установлена по оси передних колес 7. На концах передней балки 9 выполнены цапфы 10, которые сопрягаются с отверстиями элементов 11 тележки с возможностью поворота (поворот тележки возможен вокруг оси передних колес при подъеме задней части манипулятора во время резкого нажатия на поковку, зажатую в захватах хобота). Привод механизма продольного перемещения выполнен в виде длинноходового гидроцилиндра 12, установленного стационарно посредством стойки 13 на фундамент в проеме между рельсами 6, а шток 14 гидроцилиндра соединен шарнирно с поперечной балкой 9 с помощью штыря 15 и вилки 16.
Ковочный манипулятор работает в двух режимах:
- в режиме перемещения поковки за счет движущейся тележки и хобота и в режиме перемещения поковки только за счет движущейся тележки, в том числе при транспортном перемещении манипулятора к рабочей зоне пресса. Передвижение тележки, как транспортное,так и рабочее, осуществляется следующим образом.
От стационарной насосной станции - гидропривода (на чертеже не показан) или от гидропривода пресса жидкость высокого давления подается либо в поршневую полость цилиндра 12, либо в штоковую полость, при этом усилие,развиваемое этим цилиндром через шток 14, поперечную балку 9 и элементы 11,передается на тележку 1, которая будет перемещаться либо вперед, либо назад, соответственно перемещая хобот 2 с зажатой в захвате 3 поковкой, Так как масса перемещаемых частей манипулятора уменьшена за счет механизма продольного перемещения, его опорных конструкции и привода, то время таких перемещений сокращается и, следовательно,увеличится быстродействие.
Скорость перемещения манипулятора и точность остановки определяется переменной подачей жидкости в гидроцилиндр привода механизма продольного
перемещения, при этом пробуксовка колес тележки 1 относительно рельсов исключена.
Во время работы манипулятора под прессом, в случае резкого нажатия на поковку, зажатую в захватах 3 и еще не опу- щенную на нижний боек, усилие от пресса через поковку, захват 3, хобот 2 и рычажную подвеску 4 передается на тележку 1, отчего возможен подъем задней части манипулятора путем поворота тележки относительно оси передних колес 7. При этом работоспособность механизма 5 продольного перемещения не нарушится, т.к. при повороте тележки 1 относительно оси передних колес произойдет проскальзывание (поворот) эле- ментов 11, жестко соединенных с корпусом тележки, с цапфами 10 поперечной балки 9, к которой присоединен шток 14 гидроцилиндра 12.
Использование манипулятора описан- ной конструкции позволяет повысить его производительность и надежность за счет уменьшения его подвижных масс.
Формула изобретения
Ковочный манипулятор, содержащий хобот с захватом, смонтированный на тележке, установленной с возможностью возвратно-поступательного перемещения посредством передних и задних колес по рельсовому пути, и приводной механизм пермещения тележки, отличающийся тем, что, с целью повышения производительности и надежности за счет снижения подвижных масс, приводной механизм перемещения тележки выполнен в виде балки с цапфами на концах, установленной соосно с передними колесами, и силового цилиндра, корпус которого смонтирован стационарно в проеме рельсового пути по оси манипулятора, а шток шарнирно соединен с балкой, при этом ступицы передних колес, обращенные одна к другой, выполнены с отверстиями под цапфы балки для сопряжения с ними с возможностью свободного взаимного поворота.
фиг 2
А-А
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечные манипуляторы | |||
| НИИМАШ, C-lll | |||
| M., 1971, с.44-46, рис.22, 23 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Челищев Б.А | |||
| и до, Ковочные манипуляторы | |||
| НИИМАШ, C-lll, M., 1980,с.7-9, рис.1 | |||
