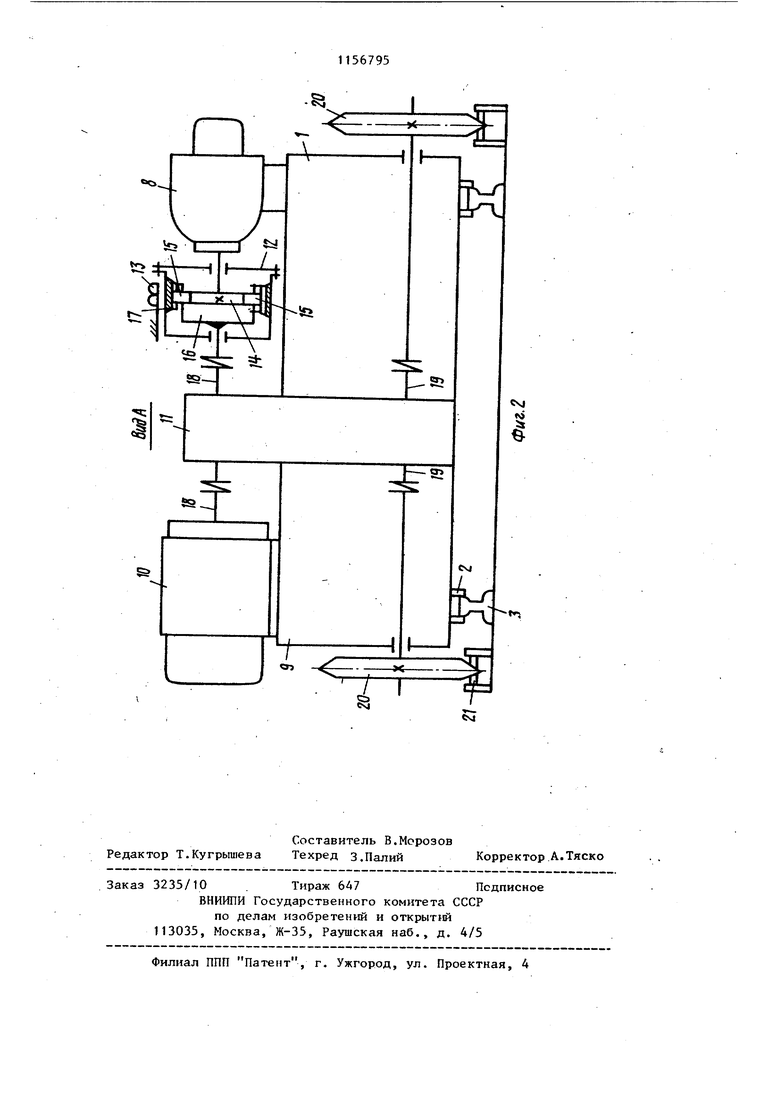
Изобретению относится к вспомога тельному оборудованию кузнечно-прес совых цехов, а именно к конструкциям ковочных манипуляторов. Целью изобретения является повышение производительности ковочиого манипулятора и улучшение условий его обслуживания. На фиг. 1 изображен схематически ковочный манипулятор, ободай вид, на 4«г. 2 - вид А на фиг. 1. Ковочный манипулятор содержит те лежку 1, перемещающуюся на колесах 2 по рельсовому пути 3. На тележке смонтированы хобот 4 с захватом 5, связанньй с гидроцнлиндрами 6 и 7, соеди(|енными с реверсивным гидронасосом 8. Привод манипулятора имеет ный каркас 9, на котором Установлен электродвигатель tO, приводной редуктор 11, планетарный редуктор 12 с электроуправляемым тормозом 13. На валу гидронасоса установлена шес терня 14, соединенная с сателлитами 15, посаженными на водило 16. Сател литы входят в зацепление с зубчатым венцом 17 корпуса планетарного редуктора, охваченньи электроуправляе NfidM тормозом. Водило 16 соединено с быстроходные валом 18 приводного редуктора 11, а на его тихоходном йалу 19 установлены звездочки 20, закрепленные на каркасе 9 и входящи в зацепление с цевочной рейкой 21. Ковочный манипулятор работает в двух режимах: в режиме перемещения поковки за счет движущейся тележки и хобота и в режиме перемещения поковки только за счет движущейсятеле ки, в том числе при траспортном перемещении манипулятора. В первом режиме работы манипулятора осевое перемещение поковки осуществляется-за счет движения тележки 1, жестко связанной с рельсовым путем 3 посредством звездочки 20 и цевочной рейки 21. При включенном злектродвигателе 10 злектроуправляемый тормоз 13 заторможен, а быстроходный вал 18 редуктора 11 вращает водило 16, и посаженные на нем сателлиты 15 обеспечивают вращение шестерни 14 и связанного с нею вала реверсивного гидронасоса 8. Поступающее под давлением масло от насоса через гидросистему подается в одну из полостей цилиндра 6, обеспечивающего осевое перемещение хобота 4 относительно движущейся тележки 1. Во втором режиме работы манипулятора осевое перемещение поковки и транспортное перемещение манипулятора осуществляется за счет движения только тележки 1, жестко связанной с рельсовым путем 3 посредством звездочки 20 и цевочной рейки 21. При включенном электродвигателе 10 электроуправляемый тормоз 13 расторможен , быстроходный вал 18 редуктора 11 вращает водило 16, и посаженные на нем сателлиты 15 обеспечивают вращение зубчатого венца 17, поскольку момент сопротивления его повороту меньше момента сопротивления на щестерне 14, связанной с реверсивным гидронасосом 8. При зтом происходит механическое отключение гидронасоса. По сравнению с известным предлагаемое изобретение позволяет повысить производительность ковочного манипу.лятора и улучшить условия его обслуживания.
t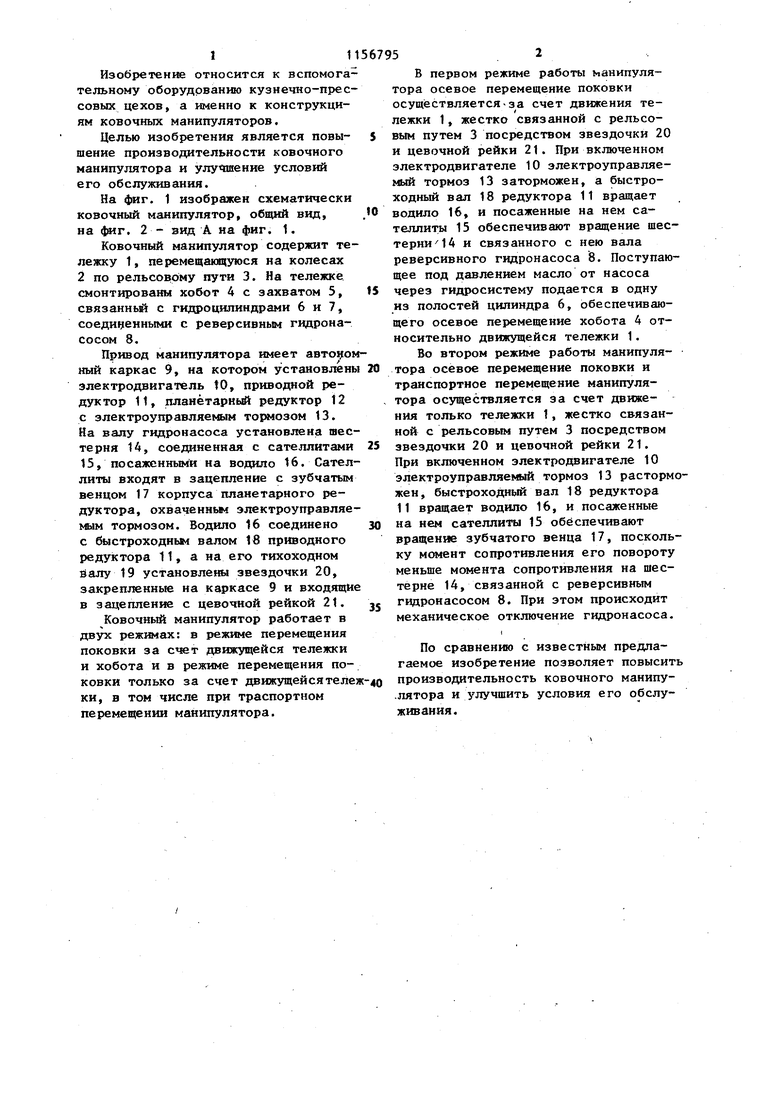
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Ковочный манипулятор | 1991 |
|
SU1766569A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1984 |
|
SU1220839A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU236207A1 |
| Ковочный манипулятор | 1980 |
|
SU893385A1 |
| Механизм вращения хобота ковочного манипулятора | 1978 |
|
SU764818A1 |
| Ковочный агрегат | 1978 |
|
SU810353A1 |
1. КОВОЧНЫЙ МАНИПУЛЯТОР, содержащий тележку с установленным на нем хоботом с захватом, кинематически, связанньм со штоками силовых цилиндров осевого перемещения, соединенных с реверсивным гидронасосом, механизм продольного перемещения тележки в виде звездочки с цевочной рейкой, связанной с редуктором, и привод в виде электродвигателя, соединенного с соосно ему установленными гидронасосом и редуктором, отличающийся тем, что, с целью повьшения производительности, он снабжен планетарным редуктором, центральная шестерня которого установлена на валу гидронасоса, а водило соединено с быстроходным валом редуктора, и тормозом зубчатого венца, жестко связанного с корпусом планетарного редуктора. 2. Манипулятор поп.1, о уличающийся тем, что, с целью улучшения условий обслуживания, он снабжен рамой, связанной с тележкой (Л и размещенной со стороны, противоположной расположению хобота, а электродвигатель, редукторы, гидронасос и звездочка смонтированы на раме. сл О) со О1
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
