этом рычаги приходят в движение за счет реактивного момента в редукторе и имеет место автоматическая самонастройка механизма, а именно: чем больше сопротивление поступательному перемещению колеса, тем больше величина приложенного к колесу внешнего момента сопротивления и соответственно больше реактивный момент в редукторе и величина толкаюш,его усилия поступательного перемеш,ения колеса. Для обеспечения прямолинейных возвратно-поступательных перемеш.ений колеса рычаги выполнены равной длины, что позволяет простым способом обеспечить безотрывность колеса от грунта при движении по ровной поверхности и восприятие колесом нагрузки.
Использование червячной пары, снабженной командным электродвигателем, упрош,ает переключение с колесного режима на колесношагающий и обратно, а размеш,ение рычагов в полости диска ходового колеса расширяет дороясный просвет и исключает утыкание рычагов в препятствия.
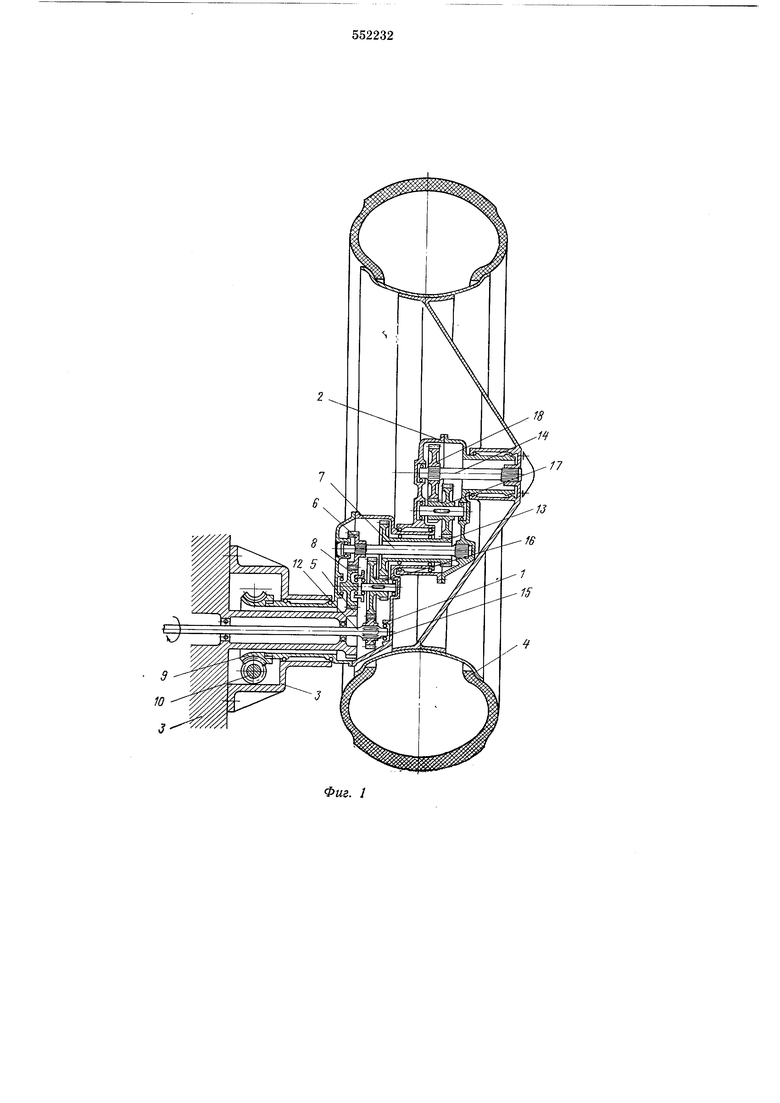
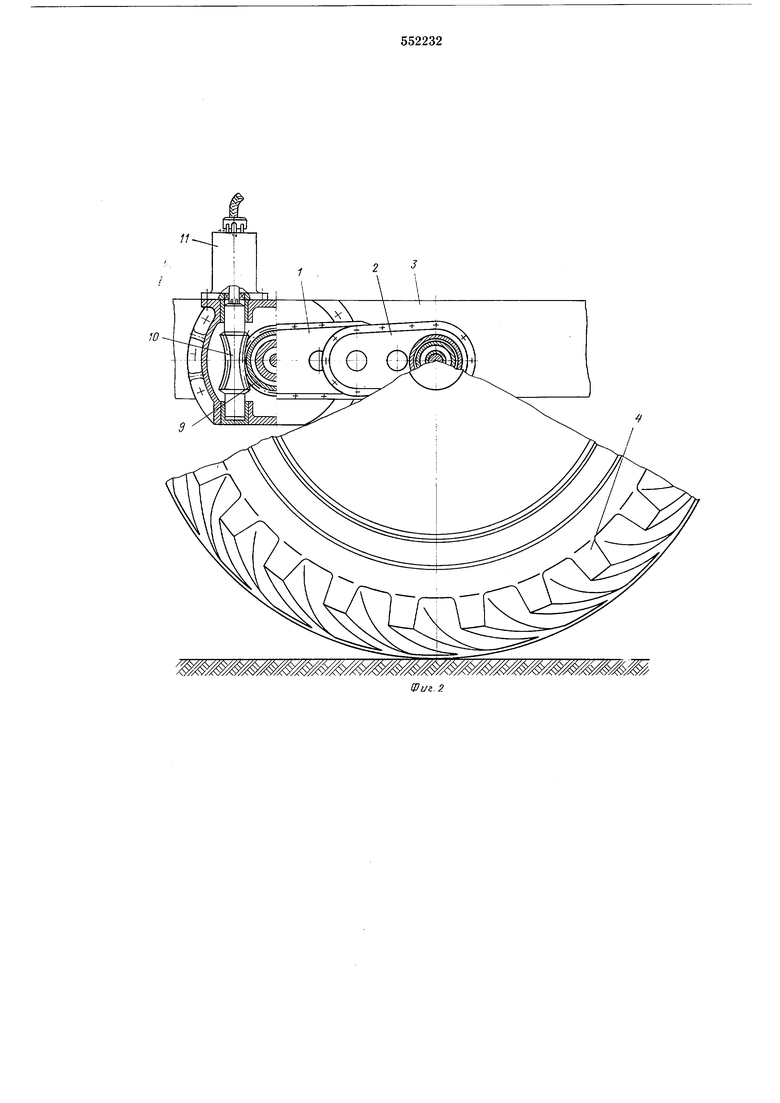
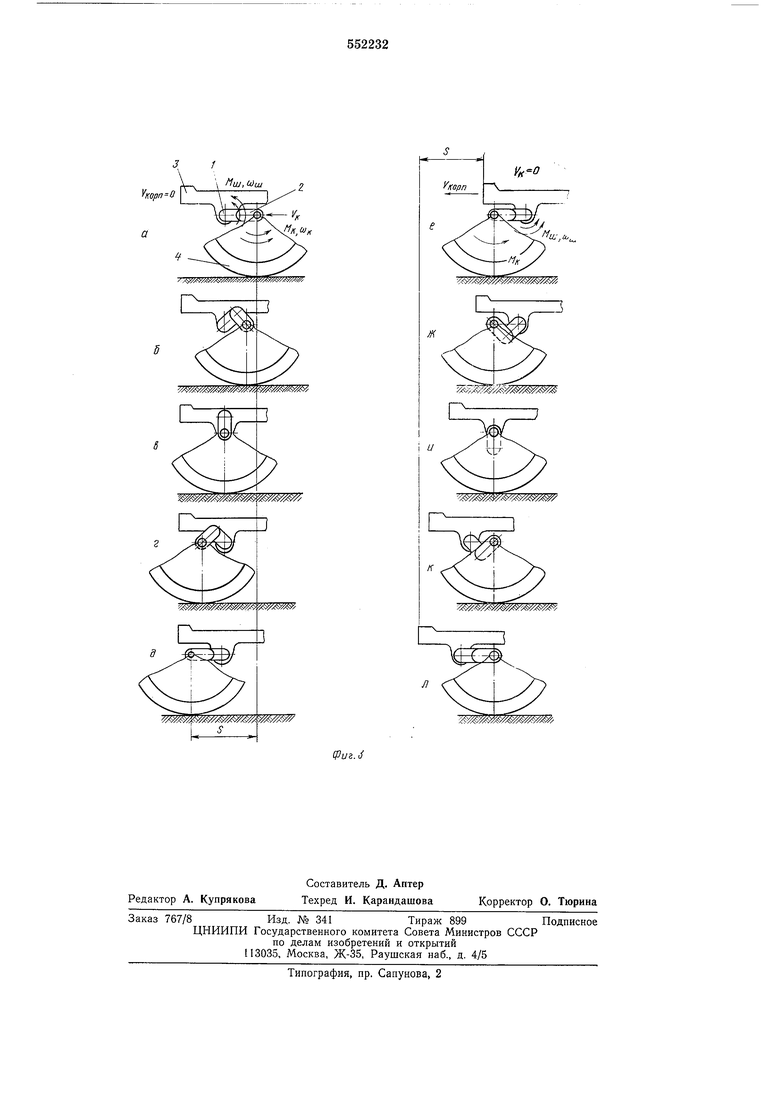
На фиг. 1 изображен движитель, разрез по оси ходового колеса, вид сверху; на фиг. 2 - то же, вид сбоку, с частичным вырезом колеса и первого рычага; «а фиг. 3 - характерные фазы работы движителя в колесно-шагаюш,ем режиме.
Колесно-шагаюш,ий движитель состоит из двух пустотелых, шарнирно сочлененных рычагов 1 и 2, первый из которых своим свободным концом со ступицей поворотно соединен с корпусом 3 транспортного средства, а второй - со ступицей ходового колеса 4. Рычаги установлены в продольной плоскости транспортного средства. Необходимая траектория перемеш,ения колеса обеспечивается встроенной в первом рычаге планетарной передачей, образованной солнечной шестерней 5, которая размеш,ена соосно со ступицей рычага 1 и жестко прикреплена к корпусу 3; водилом (рычаг 1) и сателлитом 6, жестко соединенным с рычагом 2 посредством вала 7. Между солнечной шестерней 5 и сателлитом 6 установлено паразитное колесо 8, обеспечиваюш,ее необходимое направление враш,ения рычага 2 в его планетарном движении. Передаточное отношение от солнечной шестерни 5 к сателлиту 6 выбрано равным -|-0,5, благодаря чему при равной длине рычагов обеспечивается строго прямолинейная траектория возвратнопоступательных перемеш,ений ходового колеса 4 за счет кругового движения рычага 1. Механизм блокировки, обеспечиваюш.ий неподвижность рычагов в колесном режиме движения, выполнен в виде червячной пары, образованной колесом 9, жестко соединенным с рычагом 1, и червяком 10. Механизм блокировки снабжен командным электродвигателем 11, связанным с червяком 10 и переключателем прямого и обратного враш,ений электродвигателя.
Враш,ение ходового колеса 4 и его перелчешения обеспечиваются от приводного вала 12 и осуп;ествляются с помоп ью редуктора, размеш,енного в ,рычагах 1 и 2; При этом входной вал редуктора расположен соосно ступице рычага 1 и конструктивно объединен с приводным валоМ 12, промежуточный вал 13 установлен соосно сочленяюш,ему рычаги шарнирз, а выходной вал 14 - соосно ступице ходового колеса 4 и л естко соединен с нею шлицами. Передача момента к ступице ходового колеса 4 осуш,ествляется шестерней 15, посаженной на вал 12, блоком шестерен 16, далее - блоком шестерен, конструктивно объединенных с промежуточным валом 13, блоком шестерен 17 и шестерней 18, посаженной на выходной вал 14. Рычаги 1 и 2 размеш;ены
в полости диска ходового колеса 4.
Работа колесно-шагаюш,его движителя осуш,ествляется следуюшим образом.
При выключенном командном электродвигателе 11 рычаг 1 блокирован червячной парой, рычаг 2 при этом также блокирован, поскольку солнечная шестерня 5 и водило (рычаг 1) планетарной передачи неподвижны. Вся мош,ность от приводного вала 12 через размеш,енный в рычагах редуктор передается ходовому колесу, и движитель работает как обычный колесный движитель. Все моменты, возникаюшие в движителе: реактивный момент от редукции, момент от нормальной реакции на колесе относительно оси приводного вала
12 передаются на корпус 3 тралспортного средства.
При включении командного электродвигателя 11 в направлении, соответствуюш,ем направлению действия реактивного момента на
рычаге 1, рычаги 1 и 2 разблокируются и получают возможность вращаться, причем силовым моментом является реактивный момент редуктора, обусловленный внешним моментом на колесе, а электродвигатель 11 и червячная
передача при этом только разрешают вращение рычагов. При вращении рычага 1, например, против часовой стрелки (см. фиг. 2 и 3), рычаг 2, будучи связанным с сателлитом 6 планетарной передачи, размещенной в рычаге
1, с передаточным отношением ,5, вращается с той же угловой скоростью, что и рычаг 1, но по часовой стрелке, при этом вследствие равенства длин рычагов 1 и 2 ось колеса совершает прямолинейные возвратно-поступательные перемещения относительно корпуса 3 транспортного средства. Таким образом, от одного привода (приводного вала 12) обеспечивается как вращательное, так и возвратнопоступательное перемещение колеса относительно корпуса.
Указанные возможности движителя могут быть реализованы в режиме так называемых прерывных походок, который заключается в том, что при неподвижном корпусе транспортного средства все колеса поочередно (по одному или по группам) сначала выносятся относительно корпуса вперед в направлении движения, а затем относительно неподвижных колес выносятся в направлении движения корпус транспортного средства, после чего цикл
повторяется, при этом обеспечиваются высокие тягово-сцепные свойства движителя.
Рассмотрим более подробно колесо-шагающий режим работы движителя (см. фиг. 3).
Перед этапом переноса ходового колеса корпус 3 транспортного средства неподвижен: , а колесо занимает крайнее заднее положение. При включении командного электродвигателя 11 и вращении приводного вала 12 на ходовом колесе 4 и рычаге 1 возникают соответственно моменты Мк и Мш, которые обеспечивают вращение колеса 4 и рычага 1 с угловыми скоростями сок и (Ош; нри этом и направляющий механизм и колесо будут обеспечивать перемещение оси колеса со скоростью УК (фиг. За, б, в, г, д), а само колесо перемещается вперед как толкаемое ведущее колесо.
При достижении колесом крайней передней точки траектории возвратно-поступательного перемещения (см. фиг. 3d) командный электродвигатель И и привод вращения вала 12 выключаются. При этом колесо переместится на величину S, равную суммарной длине рычагов 1 и 2.
Аналогичный цикл последовательно соверщают остальные колеса транспортного средства.
После переноса всех колес вперед начинается этап переноса корпуса, что достигается одновременным включением командных электродвигателей 11 и приводных валов 12 всех колес (см. фиг. 3е, ж, и, к, л). При этом направления моментов на рычаге 1 и ходовом колесе 4 сохраняются, а перемещение оси колеса относительно корпуса, создаваемое направляющим механизмом, изменяется на противоположное, в результате чего момент на колесе Мк является упорным моментом для перемещения корпуса вперед.
После завершения этапа переноса корпуса (см. фиг. 3л) командный электродвигатель 11 и привод вращения вала 12 отключается. При этом корпус переме цается на величину S, равную перемещению колеса,
В последующем цикл движения повторяется.
Поскольку вращение и возвратно-поступательное перемещение колеса осуществляется за счет мощности, поступающей с общего приводного вала 12, а электродвигатель 11 является не силовым, а командным, установочная мощность привода транспортного средства с предлагаемым движителем снижается примерно в 1,5 раза.
Управление транспортным средством с предлагаемым движителем существенно упрощается, так как число управляемых элементов уменьщается с двенадцати до восьми (для четырехколесной машины), при этом управление прямолинейным движением ввиду циклического характера шагания легко автоматизируется и сводится в конечном счете к включению прямого и заданного хода в колесном и колесно-щагающем режимах. Примененный в движителе механизм шагания позволяет при небольшой длине рычагов обеспечить большой шаг, а размещение рычагов в полости диска колеса повышает профильную
проходимость транспортного средства. Преимуществом рассматриваемого движителя является и то, что переход на колесный режим движения можно осуществить после блокировки рычагов в любой точке траектории поступательного перемещения колеса.
Формула изобретения
1.Колесно-шагающий движитель, содержащий два шарнирно сочлененных рычага, нервый из которых своим свободным концом со ступицей поворотно соединен с корпусом транснортиого средства, а второй - со ступицей ходового колеса, приводы вращения коле са и рычагов, и механизм блокировки последних, отличающийся тем, что, с целью упрощения управления, привод вращения рычагов состоит из солнечной шестерни, размешенной соосно со ступицей первого рычага и жестко прикрепленной к корпусу транспортного средства, сателлита, зацепленного через паразитное колесо с солнечной шестерней и установленного на валу, проходящем через сочленяющий шарнир рычагов и жестко соединенном со вторым рычагом, при этом привод вращения колеса состоит по крайней мере из двухступенчатого редуктора, входной вал которого располол ен соосно ступице первого рычага, промежуточный - сочленяющему шарниру, выходной - ступице ходового колеса, а механизм блокировки установлен в корпусе транспортного средства и соединен со ступицей первого рычага.
2.Движитель по п. 1, отличаюшийся тем, что механизм блокировки состоит из червячной пары, снабженной командным электродвигателем, при этом червячная шестерня связана со ступицей первого рычага, а червяк - с корпусом.
Источники информации, принятые во внимание при экспертизе:
1. Патент США № 3842926, кл. 180-8, 1974.
31
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Колесно-шагающий движитель | 1978 |
|
SU770907A2 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| Колесно-шагающий движитель | 1977 |
|
SU679465A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| ВЕДУЩИЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2460651C1 |