Изобретение относится к транспортному машиностроению, в частности к движителям высокой проходимости, которые могут быть использованы для пересеченной местности.
Цель изобретения - уменьшение вертикальных колебаний транспортного средства при движении по деформируемой поверхности.
На фиг.1 представлен обш.ий вид транспортного средства с шагающими колесами;
скорости ступицы 3, что обеспечивает траекторию движения башмаков относительно рамы 6 шасси 1, близкую к многоугольнику со скругленными вершинами и горизонтально ориентированным основанием.
Вследствие враш,ения ведуш.их колес 2 осуществляется перемещение шасси 1 транспортного средства относительно опорной поверхности. На фиг.1 ведушие колеса показаны в различных фазах своего действия при
на фиг.2 - шагающее колесо, разрез; на ю Движении, например, влево:заднее колесо-в
фиг.З - привод поворота корпуса редуктора.
Транспортное средство содержит шасси 1, установленное на ведущих колесах 2. Колесо 2 включает звездообразную центральную ступицу 3, через подшипники 4 уста- 15 траектории, новленную в корпусе 5 редуктора, который, в свою очередь, щарнирно закреплен в расточке рамы 6. Между рамой 6 и корпусом 5 редуктора имеется подшипник 7 скольжения. Соосно ступице 3 в подшипнимомент начала контакта переднего башмака 20 и окончания контакта (выхода из контакта) заднего башмака с опорной поверхностью; переднее колесо - в момент опоры на башмак примерно в середине его
Горизонтальная траектория нижнего участка перемещения бащмака относительно шасси 1 при движении по твердому осно- ванию обеспечивает плавность хода, т. е.
ка7 8 скольженйя установлен о снов ной вал ° отсутствие вертикальных перемещений шас- 9, на котором по концам соответстенноси 1.
закреплены солнечная шестерня 10 и щека- противовес 11 с кривошипом 12. Ступица 3 жестко соединена с водилом 13, на котором
При движении по деформируемому основанию (естественные грунты, особенно песчапосредством пальцев 14 установлены сател- 25 ые, сельскохозяйственные угодья и т. п.)
литы 15, находящиеся в зацеплении с солнечной шестерней 10 и коронной шестерней 16, неподвижно закрепленной на корпусе 5 редуктора. Звездообразная ступица 3 имеет гидроцилиндры 17 и каналы, соедиопорная поверхность башмака 20 под действием веса транспортного средства получает вертикальное перемешение. Для его компенсации (чтобы исключить вертикальные колебания шасси 1) необходимо увелиняющие гидроцилиндры с распределителем 30 чить выталкивание башмака в заднем положении (на величину глубины образующегося следа), что достигается путем подачи рабочей жидкости в дополнительный цилиндр 25. Его шток, воздействуя на рычаг 24, поворачивает корпус 5 редуктора в расточках
рабочей смеси (каналы и распределитель не показаны). В гидроцилиндрах 17 установлены поршни 18, соединенные со штоками 19, несущими опорные башмаки 20, и с шатунами 21 посредством поршневых пальцев 22. Вторые концы шатунов 21 закреплены на криво- 35 рамы 6. При этом нижний участок траек- шипе 12. В гидроцилиндрах 17 имеются уплот- тории относительно движения наклонаяется, нения 23. Корпус 5 редуктора снабжен что компенсирует проседание опорной по- рычагом 24 и шарнирно соединен со што-верхности под башмаком. Угол а поворота
ком. дополнительного гидравлического ци- корпуса 5 редуктора регулируют в зависи- линдра 25, корпус которого шарнирно при- мости от податливости опорной поверх- креплен к кронштейну 26 рамы 6 шасси 1. ности и скорости движения машины, доби- ./Чеханизм звездообразной ступицы 3 закрыт крышкой 27.
Шагающее колесо работает следующим образом.
При подаче под давлением рабочей жид- 45 кости через распределитель в соответствующие гидроцилиндры 17 возникает перемещение поршней 18, что через поршневые пальцы 22 и шатуны 21 вызывает вращение кривошипа 12 и связанного с ним основного вала 9. Через редуктор вращение пере- 50 телем рабочей смеси гидроцилиндры, штоки дается ступице 3 по кинематической цепи которых своими внешними концами соедиваясь максимальной компенсации проседания почвы под опорными башмаками (наклоненная траекториия на фиг. 1 показана пунктиром).
Формула изобретения
Шагающее колесо транспортного средства, содержащее ступицу, на которой радиаль- но установлены соединенные с распределишестерня 10 - сателлиты 15 - пальцы 14 - водило 13. При этом сателлиты 15 обкатываются внутри коронной шестерни 16. Благодаря тому, -что передаточное отношение редуктора равно числу штоков 19, угловая скорость основного вала 9 и кривошипа 12 в соответствуюшее число раз выше угловой
55
нены с опорными башмаками, а внутренними - с кривошипом, вал которого установлен СООСНО ступице и кинематически связан с нею СООСНО расположенным планетарным редуктором, передаточное отношение которого равно числу штоков, а его коронная шестерня жестко соединена с его корскорости ступицы 3, что обеспечивает траекторию движения башмаков относительно рамы 6 шасси 1, близкую к многоугольнику со скругленными вершинами и горизонтально ориентированным основанием.
Вследствие враш,ения ведуш.их колес 2 осуществляется перемещение шасси 1 транспортного средства относительно опорной поверхности. На фиг.1 ведушие колеса показаны в различных фазах своего действия при
Движении, например, влево:заднее колесо-в
траектории,
момент начала контакта переднего башмака 20 и окончания контакта (выхода из контакта) заднего башмака с опорной поверхностью; переднее колесо - в момент опоры на башмак примерно в середине его
При движении по деформируемому основанию (естественные грунты, особенно песчаопорная поверхность башмака 20 под действием веса транспортного средства получает вертикальное перемешение. Для его компенсации (чтобы исключить вертикальные колебания шасси 1) необходимо увели чить выталкивание башмака в заднем положении (на величину глубины образующегося следа), что достигается путем подачи рабочей жидкости в дополнительный цилиндр 25. Его шток, воздействуя на рычаг 24, поворачивает корпус 5 редуктора в расточках
рамы 6. При этом нижний участок траек- тории относительно движения наклонаяется, что компенсирует проседание опорной по- верхности под башмаком. Угол а поворота
корпуса 5 редуктора регулируют в зависи- мости от податливости опорной поверх- ности и скорости движения машины, доби-
телем рабочей смеси гидроцилиндры, штоки которых своими внешними концами соедиваясь максимальной компенсации проседания почвы под опорными башмаками (наклоненная траекториия на фиг. 1 показана пунктиром).
Формула изобретения
Шагающее колесо транспортного средства, содержащее ступицу, на которой радиаль- но установлены соединенные с распределителем рабочей смеси гидроцилиндры, штоки которых своими внешними концами соеди
нены с опорными башмаками, а внутренними - с кривошипом, вал которого установлен СООСНО ступице и кинематически связан с нею СООСНО расположенным планетарным редуктором, передаточное отношение которого равно числу штоков, а его коронная шестерня жестко соединена с его корпусом, отличающееся тем, что, с целью уменьшения вертикальных колебаний транспортного средства при движении по деформируемой поверхности, корпус редуктора установлен на ступице шарнирно и соединен с силовым приводом его поворота.
Y cfJua.J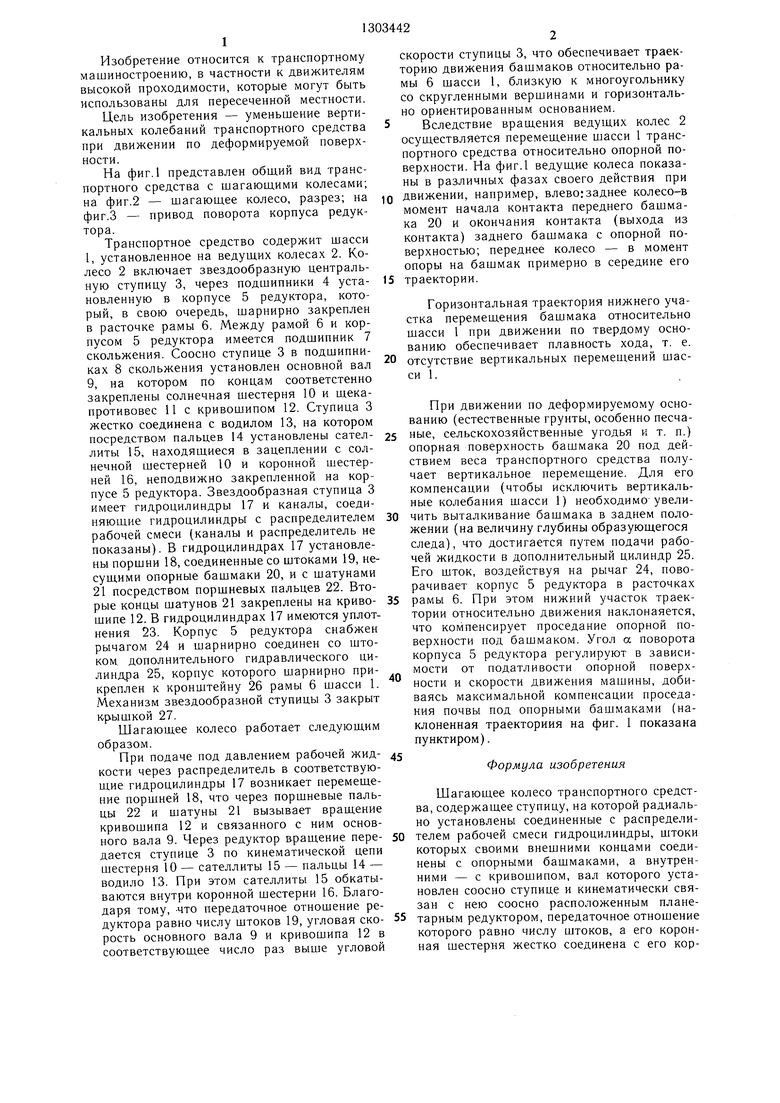
| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущее колесо транспортногоСРЕдСТВА | 1979 |
|
SU846316A1 |
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156711C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
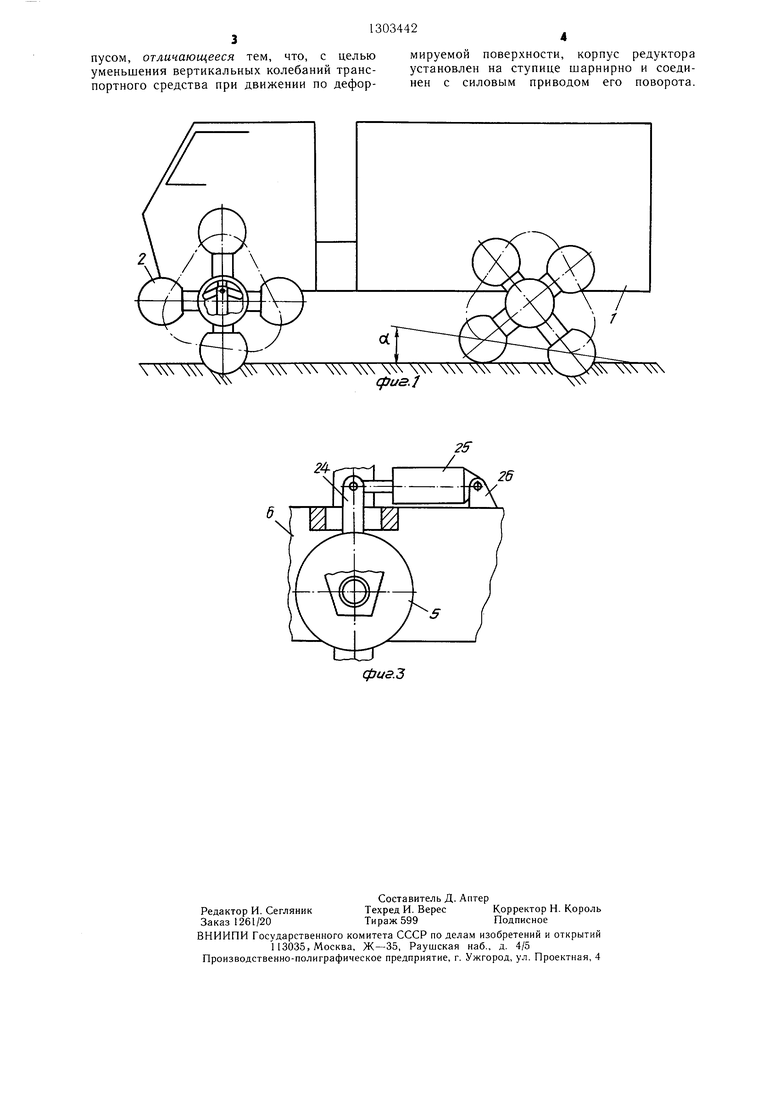
Изобретение относится к движителям высокой проходимости, предназначенным для бездорожья. Цель изобретения - уменьшение вертикальных колебаний корпуса за счет компенсации проседания грунта под опорными башмаками. Колесо состоит из звез дообразной ступицы 3 с радиально установленными гидроцилиндрами 17, в которых штоки 19 с одной стороны соединены с опорными башмаками 20, а с другой стороны - соединены шатунами 21 с кривошипом 12, вал которого посредством планетарного редуктора соединен со ступицей. Корпус 5 редуктора шарнирно установлен на ступице 3 и соединен с приводом его поворота. При движении по деформируемому грунту проседание башмаков 20 компенсируется поворотом корпуса 5 редуктора. При этом траектория движения каждого башмака остается в Опорной части прямолинейной, но наклонной к горизонту. Больший угол поворота корпуса 5 редуктора в большей степени наклоняет траекторию. 3 ил. .го (Л со о со 4;: Ю V04 cpua.Z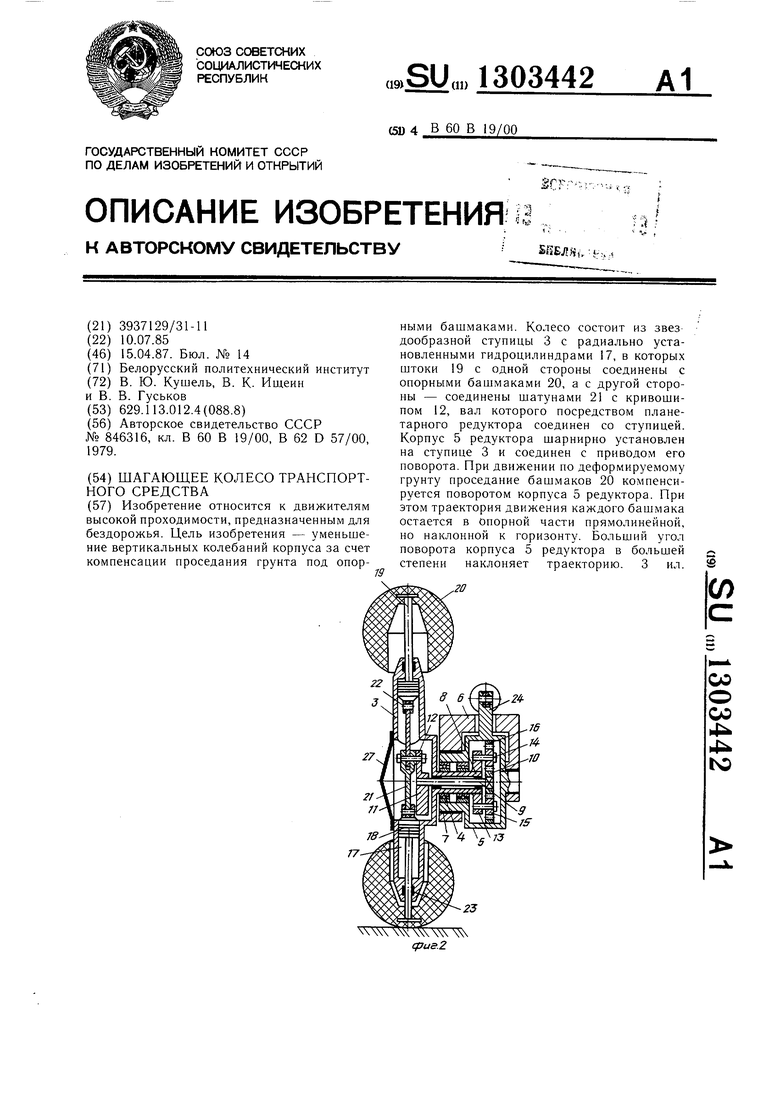
физ.З
| Ведущее колесо транспортногоСРЕдСТВА | 1979 |
|
SU846316A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
