;54) СИСТЕМА УПРАВЛЕНИЯ МОЛОТОМ Настоящее изобретение относится к обработке металлов давлением и может использоваться для управления молотами. Известна система управления молотом, содержащая связанный с приво дом молота блок управления, блок задания программы режима обработки, блок преобразования сигналов и соединенный с ним установленный на ста нине датчик положения подвижных частей, а также закрепленный на подвижных частях задатчик импульсов Недостатками известной системы управления являются малая надежность и низкая точность дозирования энергии ударов, что связано с необходимостью установки на станине большого количества датчиков для получения различных уровней энергии ударов а также с тем, что датчики находятся в различных температурных условиях, потому что температура нижней части станины выше/ чем верхней. Целью настоящего изобретения является повышение точности дозирования энергии ударов и надежности. , Поставленная цель достигается за счет того, что известная система управления молотом, содержащая связанный с приводом молота блок управления, блок задания программы режима обработки, блок преобразования сигналов и соединенный с НШ11 установленный на станине датчик положения подвижных частей, а также закрепленный на подвижных частях задатчик импульсов, снабжена установленным на станине дополнительным датчиком положения подвижных частей, а также двумя блоками преобразования сигналов, блоком сложения, блоком сравнения, двумя блоками совпадения и двумя счетчиками импульсов. При этом основной блок преобразования сигналов соединен со входом первого счетчика импульсов, а один из выходов этого счетчика с первым входом первого блока совпадения, первый дополнительный блок преобразования сигналов последовательно соединен со вторым счетчиком импульсов и первым входом второго блока совпадения, основной датчик положения подвижных частей - со вхолами основного и первого дополнительного блоков преобразования сигналов, дополнительный датчик положения подвижных частей - со входом второго дополнительного блока преобразова1НИЯ сигналов, который соединен с первым,вхааом блока сложения, выход
которого соединен с первым входом блока срайнения, выход которого соединен со вторым входом первого блок совпадения. При это второй выход первого счетчика импульсов связан со вторым входом блока сложения, блок задания программы соединен со вторыми входами блока сравнения и второго блока совпадения, а выходы упомянутых блоков совпадения соединены с соответствующими входами блока управления,
Задатчик импульсов выполнен в виде зубчатой рейки.
На чертеже изображена схема устройства.
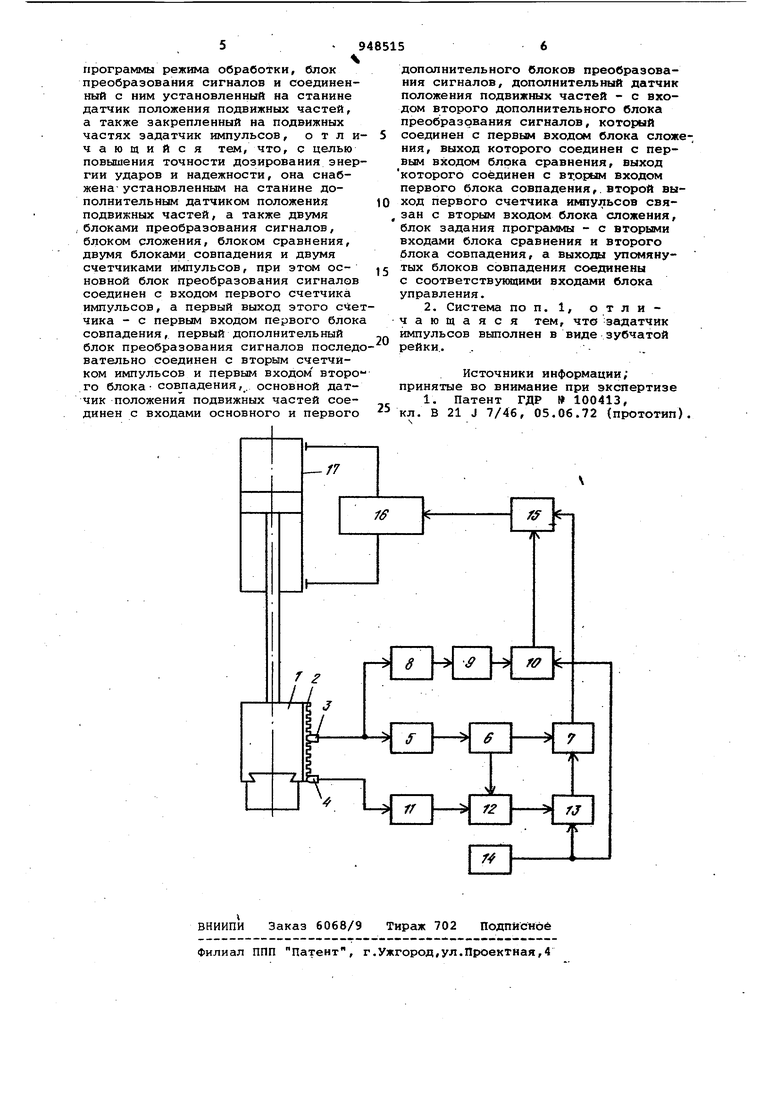
Устройство содержит смонтированный на подвижных частях 1 задатчик импульсов 2 в виде зубчатой рейки, взаимодействующей с датчиком 3 положения подвижных частей и дополнительным датчиком 4 положения подвижных частей.
Блок 5 преобразования сигналов соединен со входом счетчика б импулсов , первый выход которого соединен с первым входом первого блока 7 совпадения. Блок 8 преобразования сигналов последовательно соединен со счетчиком 9 импульсов и первым входом блока 10 совпадения. Датчик 3 соединен со входом блока 11 преобразования сигналов, который соедине с первым входом блока 12 сложения. Выход последнего соединен с первым Входом блока 13 сравнения, а выход блока 13 - со вторым входом блока 7 Второй выход счетчика 6 связан со вторым входом блока 12, Блок 14 задания программы режима обработки соединен со вторыми входами блоков 13 и 10, выходы которых соединены с соответствующими входами блока 15 управления, связанного с приводом . 16 молота.
Устройство работает следующим образом,
В исходном положении подвижные части 1 с задатчиком импульсов в виде зубчатой рейки 2 находятся вверху. При поступлении сигнала с блока 15 управления в привод 16 подвижные части разгоняются вниз. При этом рейка 2 взаимодействует с бесконтакным датчиком 3, в котором вырабатываются сигналы, поступающие через счетчик 6 на вход блока 7 и вход блока 12. При достижении подвижными частями с рейкой 2 датчика 4 корректиров и сигнал с него поступает на вход блока 11, причем этот сигнал соот-ветствует строго определенному положению датчика 4 относительно плоскости соударения ытампов, т,е, в блок 11 поступает информация о том, какой отрезок хода разгона осталось пройти подвижным частям 1 до начала хода торможения. Блок 11 пропускает
сигнал с датчика 4 на блок 12 только при движении бабы вниз.
На соответствующий вход блока сложения 12 поступает сигнал и со счетчика 6, соответствующий отрезку хода, пройденному подвижными частями из верхнего положения до датчика 4, С выхода блока 12 на один вход блока 13 поступает сигнал, соответствующий истинному ходу разгона подвижных частей вниз, На другой вход этого блока поступает сигнал с блока 14, соответствующий заданному ходу разгона подвижных частей вниз. Если истинный ход разгона подвижных частей вниз соответствует заданному, то с выхода блока 13 на вход блока 7 П9ступает сигнал, равный сигналу с выхода блока 14, Если же истинный ход разгона подвижных частей вниз окажется больше или меньше заданного, в блоке 13 сигнал с блока 14 будет уменьшен или увеличен соответственно, в зависимости от того, насколько истинный ход разгона подвижных частей вниз больше или меньше заданного.
При этом с выхода блока 13 откорректированный сигнал поступает на вход блока 7, При совпадении данного сигнала с сигналом, поступающим на другой вход блока 7 с выхода счетчика 6, на выходе блока 7 появляется сигнал на окончание хода разгона подвижных частей вниз. Сигнал поступает на вход блока 15 управления, связанного с приводом молота. Происходят торможение и останов подвижных частей. После останова сразу начинается разгон вверх. При этом импульсы с датчика 3 поступают на вход блока 8, который пропускает сигналы только на ходе подвижных частей вверх, С выхода блока 8 через счетчик 9 сигналы поступают на вход блока 10, на другой вход которого поступают сигналы с блока 14, соответствующие заданному ходу разгона подвижных частей вверх. При совпадении сигналов на обоих входах блока 10 на его выходе появляется сигнал на останов подвижных частей в верхнем положении, который поступает в блок 15 управления. Происходит останов подвижных частей в верхнем положении ,
Экономический эффект от внедрения изобретения обеспечивается благодаря повышению точности дозирования энергии ударов и надежности.
Формула изобретения
1, Система управления молотом, содержащая связанный с приводом молота блок управления, блок задания
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Система управления молотом | 1982 |
|
SU1060290A1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
| Система управления штамповочным молотом | 1986 |
|
SU1388173A1 |
| Система управления молотом | 1983 |
|
SU1082536A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Устройство для управления скоростными режимами перемоточного станка | 1984 |
|
SU1236037A1 |
| Система управления гидровинтовым прессом | 1977 |
|
SU745706A1 |
| Устройство управления перемоточным станком | 1981 |
|
SU996580A1 |
| Устройство для определения этапов прокатки | 1982 |
|
SU1057133A2 |
