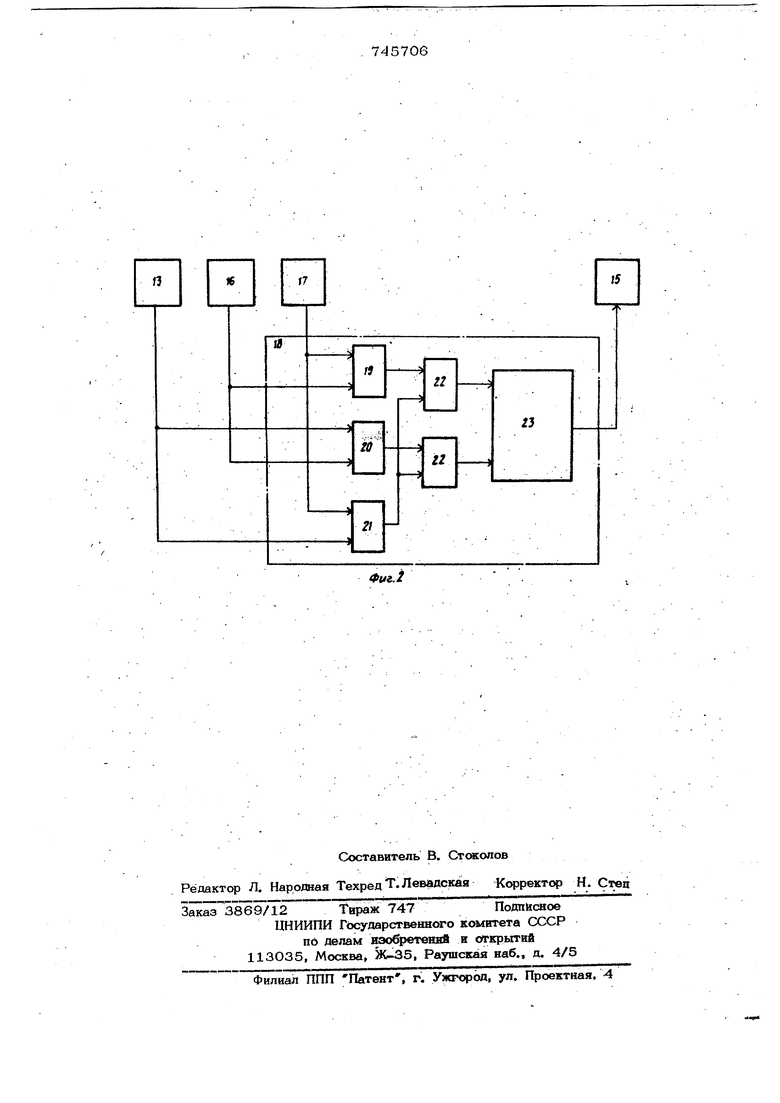
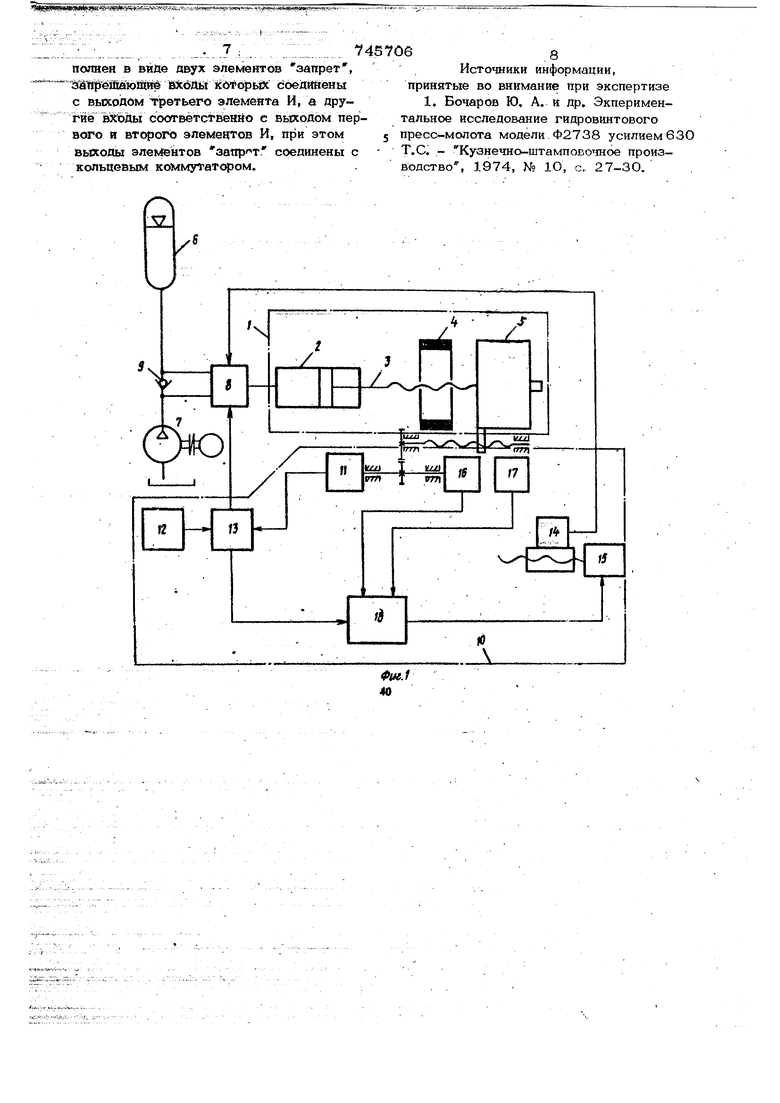
(54) СИСТЕМА УПРАВЛЕНИЯ Изобретение относится к машиностроению, в частности к конструкции прессов. Известна система управления гидро- винтовым прессом, содержащая управляемый золотник, связьшающий насос и акку мулятор с гидроцилиндром ползуна- пресса Датчик прохождения, ползуном точки конца Хода приближения с приводом его перемещения, соединенный с управляемым золотником, датчик и задатчик скорости ползуна, соединенные с блоком сравнения скоростей flj. Однако работу известной системы характеризует с одной стороны, низкая точность дозирования энергии в зависимости от пути разгона ползуна, а, с другой, нестабильность работы системы при отклю чении давления при контроле по скорости ползуна в силу образования ра;зрывов . струи рабочей жидкости. Цель изобретения - повышение точности и стабильности дозирования энергии удара. Цепь достигается тем, что система ГИДРОВИНТОВЫМ ПРЕССОМ управления снабжена датчиками перемещения ползуна и прохождения им заданной точки прекращения: разгона, логической схемой, соединенной с выходами этих датчиков и выходом блока сравнения скоростей. Причем логическая схема содержит средства для определения направления перемещения привода датчика конца хода приближения, а упомянутый привод вьтолнен в виде шагового двигателя. Кроме того, Логическая схема управления содержит кольцевой коммутатор и три элемента И, один из которых соединен своими входами с датчиком перемещения ползуна и датчиком прохржпе1шя Ползуном- заданной точки прекреодения разгона, второй эпемент И своими входами - с датчиком перемещения ползуна и ьлокоМ сравнения скоростей, третий элемент своими входами - с блоком сравнения скоростей и датчиком прохождения ползуном заданной точки прекраще.иия разгсша, и содержат два элемента запрет, запрещающие входы которых соединены с йыходом третьего элемента И, а другие входы соответственно р в.ыходом первого и второго элемента И .Выходы элементов запрет соединены с кольцевым коммутатором. На фиг. 1 представлена функциональная схема системы управления; на фиг. 2логическая часть. Система управления содержит гидровинтовой пресс 1, состоящий из гидроцилиндра 2, винта 3, маховика 4 и ползуна 5 газогидравлический аккумулятор б и гидронасос 7, сообщены с управляемым золотником 8, и между собой посредством обратного клапана 9, и схему управления 10, состоящую из датчика скорости 1 связаннох-о механической передачей с ползуном njaecca, задатчика скорости 12 и блока сравнения скоростей 13, входы которого соединены с упомянутыми датчиками, а один из выходов - с управляемым золотником 8. Кроме этого, схема управления 10 содержит датчик 14 точки конца хода приближения с приводом 15 его перемещения, датчик 16 перемещения ползуна и датчик 17 заданной точки прекращения разгона. Датчики 16 и 17 соединены с входами логической схемы управления 18 еще на один вход которой подан сигнал с блока 13 сравнения чжоростей. Выход логической схемы 18 соединен с приво дом 15. Кроме этого, сигнал с датчика 14 подан на электроуправляемый золотник 8.. Логическая схема 18 включает три логических элемента И 19-21. Элемент 1 соединен своими входами с датчиком 16 перемещения ползуна и датчиком 17 прохождения ползуном заданной точки прекращения разгона, элемент 2О своими входами - с датчиком 16 и блоком 13 сравнения скоростей. Элемент 21 соединен своими входами с блоком сравнения скоростей 13 и датчиком 17. Кроме этого, имеются два логических элемента запрет 22, запрещающие входы которых соединены с выходом элемента 21, а дру гие входы соответственно - с вьосодбм л гических элементов 19 и 20, при этом В1 1ходы элементов запрет. 22 соединены с кольцевым коммутатором 23, Ойушестйляющим управление шаговьш двигателем 15 привода перемещения датчика 14 Система работает следующий образом. При включении хода приближения осуществляют подачу рабочей жидкости в цйлнпндр 2 от насоса 7 посредством уп7464 равляемого золотника 8. При этом ползун 5 перемещается с постоянной скоростью до момента срабатывания датчика 14 конца хода приближения. При срабатьюанйи датчика 14 сигнал с него поступает на управляемый золотник 8, который производит переключение питания гидроцилиндра с насоса на гидроаккумулятор. 6. В результате этого начинается ход разгона : ползуна, в процессе которого скорость постоянно нарастает. При движении ползуна пресса сигнал от датчика скорости 11 поступает на вход блока сравнения скоростей, а сигнал с датчика 16 перемещения ползуна на логическую схему управления 18. При достижении ползуном скорости заданной задатчиком 12.сигнал от блока сравнения скоростей 13 поступает на золотник 8, который переключается, и разгон прекращается. Дальнейшее движение ползуна до соударения с обрабатываемой заготовкбй будет происходить по инерции. При работе системы управления могут быть следующие вариантьк скорость ползуна достигается раньше, чем это необходимо. В этом случае сигнал с датчика скорости ползуна, достигнув равенства с сигналом задатчика 12, вызовет появление сигнала на выходах блока сравнения скоростей 13. Один из них, как указывалось, отключает разгон, а другой поступает на логическую схему управления 18, где попадает на входы логических элементов И 20 и 21. Одновременно с этим сигнал от датчика перемещения 16 поступает на входы элементов И 19 и 2О. В результате этого на обоих входах элемента 20 появляются сигналы, что обеспечивает прохождение импульсного сигнала от датчика 16 перемещения ползуна на выход элемента 20. Сигнал с выхода элемента 2 О поступает на вход элемента запрет 22. На запрещающем входе элемента запрет 22 сигнала нет, как как си вь5 абатьшается в том случае, если на вход элемента И .21 поступают одновременно сигналы огг блока сравнений .скоростей 13 и датчика 17 точки прекращения разгона, т.е. при достижении скорости в заданный момент. В связи с этим элемент запрет 22 пропускает импульсный сигнал на вход кольцевого коммутатора 23, который коммутирует импульсы по обмоткам шагового двигателя 15, он вращается и перемещает датчик 14 в сторону увеличенчя хода приближения. Это 6ynet происхо дить до момента срабатьшания датчика 1 При срабатыващш его на входах элемен та 21 появляются оба сигнала и на выходе также появляется сигнал, который приводит элемент запрет 22 в закрытое состояние. Прохождение импульсов на кольцевой коммутатор прекращается и перемещение датчика 14 приостанавливается в точке, обеспечивающей совпадение момента достижения заданной скорости с заданной у точкой, определяемой датчиком 17, в очередном цикле работы пресса. Скорость ползуна достигается позже, чем это необходимо. В этом случае на логическую схему 1 поступает сначала сигнал с датчика 17. Поступив на вход элемента И 19, еж раз решает прохождение импульсов от датчика перемещения 16 на вход элемента запре 22. В связи с тем, что скорость не достигла к этому моменту заданной величины, сигнал от блока сравнения скоростей 13 отсутствует, в связи с чем на запрещающие входы схем запрет 22 . сигнал не подается. В результате импульсы проходят на втсфой вход кольцевого коммутатора, что обеспечивает вращение двигателя 15 в сторону, противоположную предыдущему. Движение продолжается до момента дости жения ползуном заданной скорости. При этом сигнал от блока сравнения 13 посту пает на вход элемента И 21, а сигнал от датчика 17 поступает ранее, в результате чего на запрещающий вход его.поступает сигнал и прохождение импульсов прекращается, двигатель останавливается в положении, когда датчик 14 обес печит в очередном цикле совпадение момента достижения заданной скорости при прохождении ползуном заданной точки. Скорость ползуна достигается в заданной точке прекращения разгона. В этом случае сигналы от блока сравнения скоростей 13 и датчика 17 точки прекращения разгона поступают на элемент 21 И одновременно. В результате чего на входы элемента запрет 22 сразу поступает запрещающий сигнал и прохождения импульсов от датчика 16 на входы кольцевого коммутатора не происходит. В связи с этим коррекции положе ния датчика 14 в этом случае не нройо:Ходит, так как заданная скорость ползу1на достигается в заданной точке, Кроме этого, система управления обеспечивает автоматическую установку датчика 14 уже при первом цикле работы пресса, если заведено установить датчик 14 в положение, обеспечивающее путь разгона больший, чём это необходимо, например с исходного положения ползуна. Таким образом, система управления может быть использована для управления гидровинтовьши прессами с обеспечением стабильности энергии удара и усилия деформации при изменении факторов, влияющих на их отклонение, что обеспечивает более высокое качество заготовок. Экономнческий эффект от применения системы управления обуславливается повышением качества и стабильности штамповки. Формула изобрет.ения 1. Система управления гидровинтовьпл прессом, содержащая управляемый золот связьшающий насос И аккумулятор гидроцйлшдром ползуна пресса, датчик прохождения ползуном точки конца хода приближения с приводом его перемещения, соединшньй с управляемым золотником Датчик и задатчик скорости ползуна соединенные с блоком сравнения скоростей, о т л и ч а ю щ а я с я тем, что, с целью- повышения стабильности и точности дозирования энергии удара , она снабжена датчиками перемещения ползуна и прохождения ползуном заданной точки . прекращения разгсжа, логической , соединённой с вьйодами этих датчиков и выходом блока срёвнения скс остей. 2.Система по п. 1, о т л и ч°а юш а я о я тем, что она снабжена средствами определения направления переме.щения привода датчика кояца хода приближения, при этом упомянутый привод вьшолнен в виде шагового двигателя. 3.Система по п. .2, о т л и ч а а я с я тем, что логическая схема управления снабжена кольцевым коммутатором и тремя элементами И, один из которых. соед{шен своими входами с . датчиком перемещения ползуна и датчиком прсжбждения ползуном задшшой точки прекращения разгона, второй элемент И соединен своими входами с датчиком перемещения ползуна и блоком сравнения скоростей, третий элемент соединен свовмн входами с блоком сравнения скоростей и датчиком прохождения ползунсм эаданнойточки прекращения разгона, и вы- - i;.J; ; : 74 полней в виде двух элементов запрет, Ш1гфмшоШ1ё еэсдш г кбторы с выходом третьего элемента И, а другие вжъды соотвётственйо с выходом первого и второго элементов И, при этом вьисоды элементов запр т соединены с кольцевым коммутатором. 6 Источники информации, принятые во внимание при экспертизе 1, Бочаров Ю, А. и др. Экпериментальное исследование гидровинтового пресс-молота модели Ф2738 усилием 630 Т.е. - Кузнечно-штамповошое производство, 1974, № 1О, с.. 27-30.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидровинтовым прессом | 1977 |
|
SU901052A1 |
| Система управления гидровинтовымпРЕСС-МОлОТОМ | 1976 |
|
SU795968A2 |
| Система управления гидровинтовым пресс-молотом | 1975 |
|
SU695844A1 |
| Гидровинтовой пресс-молот | 1980 |
|
SU1022774A2 |
| Гидровинтовой пресс-молот с двусторонним ударом по заготовке | 1974 |
|
SU695758A2 |
| Устройство для управления вентильнымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU843121A1 |
| Система управления прессом | 1978 |
|
SU791556A1 |
| Устройство для управления шаговым двигателем | 1981 |
|
SU1015335A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРОГРАММНОГО | 1973 |
|
SU384092A1 |