(54) ВЫНОСНАЯ ОПОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Выносная опора | 2019 |
|
RU2726507C1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| БАРОМЕТРИЧЕСКИЙ ДВИГАТЕЛЬ В.С.ГРИГОРЧУКА | 1997 |
|
RU2116505C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| МОТОРНОЕ СУДНО В.С.ГРИГОРЧУКА | 1997 |
|
RU2112695C1 |
| ВЫНОСНАЯ ОПОРА ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2005 |
|
RU2304079C1 |
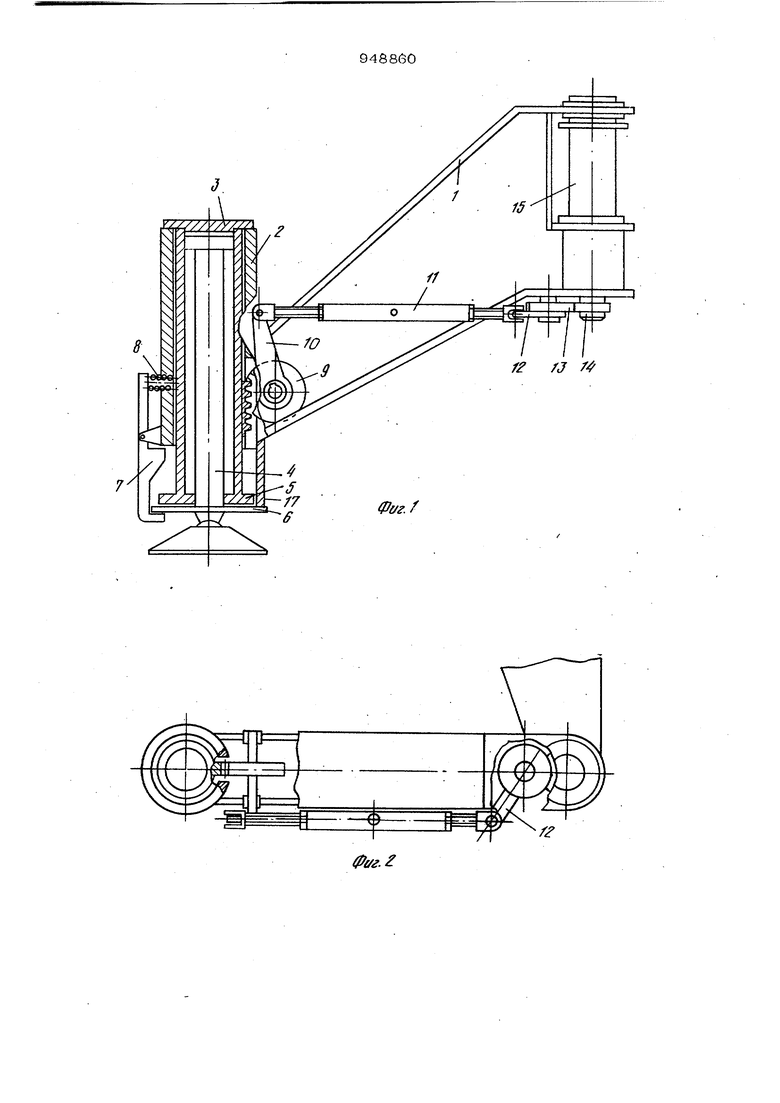
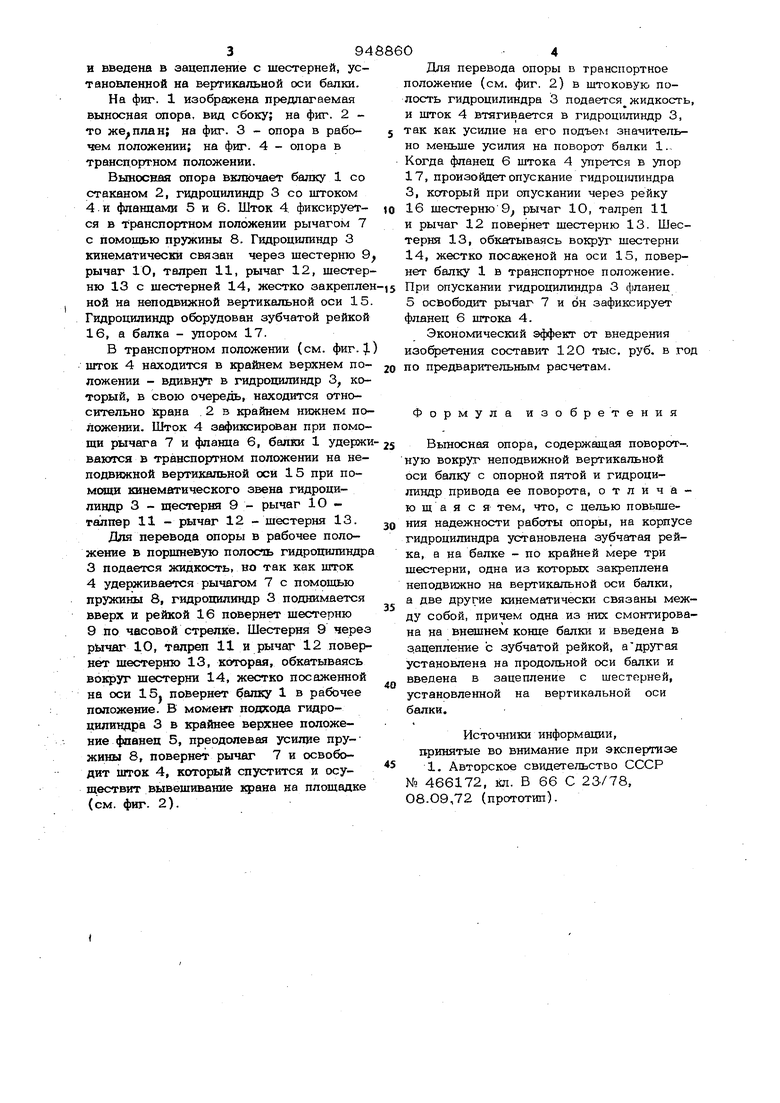
Изобретение относится к выносным опорам самоходных грузоподъемных машин, например стреловых самоходных кранов. Известна выносная опора, содержащая поворотнуЬ вокруг вертикальной резьбово оси балку. На резьбовой оси смонтирована гайка, шарнирно соединенная с корпусом гидроцилиндра, шток которого взаимодействует -с одним плечом двуплечего рычага, шарнирно установленного на корпус балки, другое плечо кото|эого связано со штангой опорной пяты, причем она снабжена устройством, создающим дополнительное сопротивление гидроцилиндру. Это устройство вьшолнено в виде закрепленной внутри балки подпружиненной щтан ги, проходящей через укрепленный в подвижной секции балки кронштейн Щ Недостатком известного устройства является то, что последовательность oneраций поворота опоры и выдвижение или подъем опоры пятой зависят от жесткости пружин, при уменьшении, в результате старения, жесткости пружин или при появлении дополнительных сопротивлений повороту в шарнире опоры или в резьбовой гайке вначале произойдет перемещение выдвижной секции, а не rtoBopor опоры, что нарушит очередность работы элементов опор, и не позволит установить на них кран. Конструкция опоры окажется неработоспособной, т.е. недостаточно надежной в работе. Цель изобретения - повышение надежности опоры в работе. Цель достигается тем, что на корпусе гидроципиндра установлена зубчатая рейка, а на блоке - по крайней мере три шестерик, одна из которьк закренлена неподвижно на вёртикапьнйй оси балки, а две другие кинематически связаны между собой, причем одна из них смонтирована на внешнем конце балки и введена в зацепление с зубчатой рейкой, а другая установлена на продольной оси балки. и введена в зацепление с шестерней, установленной на вертикальной оси балки. На фиг. 1 изображена предлагаемая выносная сшора, вид сбоку; на фиг. 2 то же план; на фиг. 3 - опора в рабочем положении; на фиг. 4 - опора в транспортном положении. Выносная опора включает балку 1 со стаканом 2, гидроцилиндр 3 со штоком 4.и фланцами 5 и 6. Шток 4. фиксируется в транспортном положении рычагом 7 с помощью пружины 8. Гидроцилиндр 3 кинематически связан через шестерню 9 рычаг 1О, талреп 11, рычаг 12, шестер ню 13 с шестерней 14, жестко закреплен ной на неподвижной вертикальной оси 15 Гидроцилиндр оборудован зубчатой рейкой 16, а балка - упором 17. В транспортном положении (см. фиг.. шток 4 находится в крайнем верхнем положенин - вдивнут в гидроцилиндр 3, который, в свою очередь, находится относительно крана 2 в крайнем нижнем положении. Шток 4 зафиксирован при помоши рычага 7 и фланца 6, балки 1 удержи ваются в транспортном положении на неподвижной вертикальной оси 15 при пометци кинематического звена гидроцилиндр 3 - щестерня 9 - рычаг 1О талпер 11 - рычаг 12 - шестерня 13. Для перевода опоры в рабочее положение в поршневую полость гидрошшиндра 3подается жидкость, но так как шток 4удерживается рычагом 7 с помощью пружины 8, гидродилиндр 3 поднимается вверх и рейкой 16 повернет шестерню 9 по часовой стрелке. Шестерня 9 через рычаг 10, талреп 11 и рычаг 12 повернет шестерню 13, которая, обкатываясь вокруг шестерни 14, жестко посаженной на оси 15j повернет балку 1 в рабочее положение. В момент подхода гидроцилиндра 3 в крайнее верхнее положение фпанец 5, преодолевая усилие пружины 8, повернет рычаг 7 и освободит шток 4, который спустится и осуществит вывешивание крана на площадке (см. фиг. 2). Для перевода опоры в транспортное положение (см. фиг. 2) в штоковую полость гидроцилиндра 3 подается жидкость, и шток 4 втягивается в гидроцилиндр 3, так как усилие на его подъем значительно меньше усилия на поворот балки 1. Когда фланец 6 штока 4 упрется в упор 17, произойдет опускание гидроцилиндра 3, который при опускании через рейку 16 шестерню 9 рычаг 10, талреп 11 и рычаг 12 повернет шестерню 13. Шестерня 13, обкатываясь вокруг шестерни 14, жестко посаженой на оси 15, повернет балку 1 в транспортное положение. При опускании гидроцилиндра 3 фланец 5 освободит рычаг 7 и он зафиксирует фланец 6 штока 4. Экономический эффект от внедрения изобретения составит 120 тыс, руб. в год по предварительным расчетам, Формула изобретения Вьшосная опора, содержащая поворот-. ую вокруг неподвижной вертикальной оси балку с опорной пятой и гидроцилиндр привода ее поворота, о т л и ч а ю ш а я с я тем, что, с целью повьшгения надежности работы опоры, на корпусе гидроцилиндра установлена зубчатая рейка, а на балке - по крайней мере три шестерни, одна из которых закреплена неподвижно на вертикальной оси балки, а две другие кинематически связаны между собой, причем одна из них смонтирована на внешнем конце балки и введена в зацепление с зубчатой рейкой, адругая установлена на продольной оси балки и введена в зацепление с шестернеи, установленной на вертикальной оси балки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 466172, кп. В 66 С 23У78. 08.09,72 (прототип).
