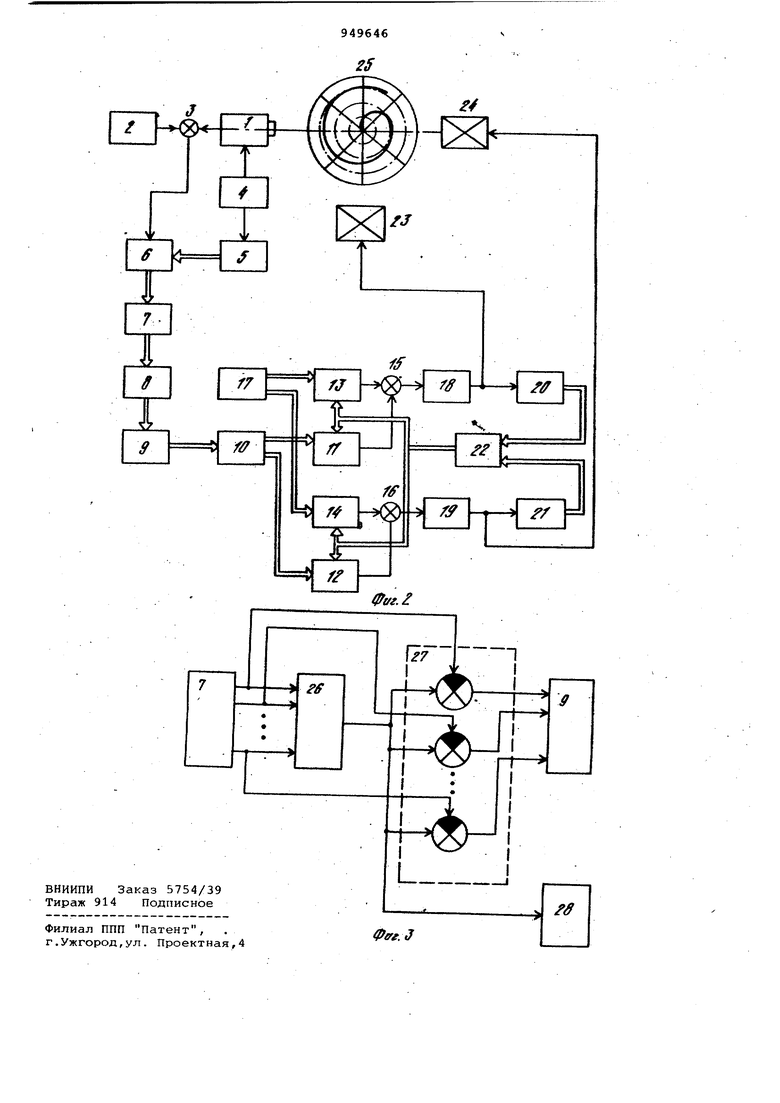
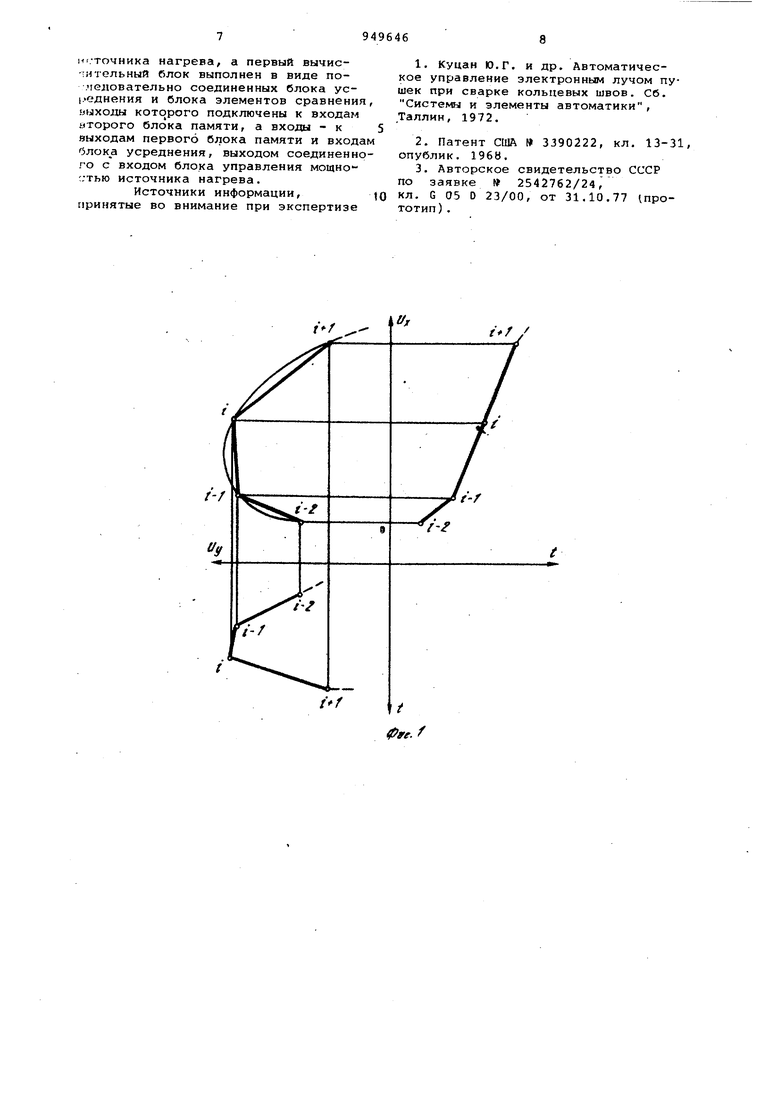
входы которого подсоединены к выходам пороговых элементов, входами св занных с выходами соответствующих интеграторов и входами соответствую щих блоков управления движением источника нагрева., а выход задатчика с ставляющих скорости движения источника нагрева подключен к другим вхо третьего и четвертого коммутаторов, выходами связанных с первыми входам сумматоров, вторые входы которых соединены с выходами первого и втор го коммутаторов, .а выходы - со входами интеграторов. С целью расширения области приме нения, устройство содержит блок уп равления мощностью источника нагрева, а первый вычислительный блок вы полнен в виде последовательно соеди ненных блока усреднения и бЛока эле ментов сравнения, выхода которого подключены ко входам второго блока памяти, а входы - к выходам первого блока памяти и входам блока усреднения , выходом соединенного со входом блока управления мощностью источниканагрева. Сигналы управления движением источника энергии (луча) формируют параллельно по двум ортогональным осям Для этого заданную траекторию движения источника энергии аппроксимируют конечным числом линейных отрезков и определяют- проекции каждого из участков на ортогональные оси. Пропорционально величине этих проекций задают ортогональные составляющие скорости движения источника. Сигнал Коррекции скорости для каждого из участков траектории разделяШ; на два сигнала, соатветствующих составляющим коррекции по каждой оси, iaтем эти. сигналы суммируют с сигналами, соответствующими ортогональным составляющим заданной скорости движения источника энергии, после чего интегрируют суммарные сигналы. В случае периодического движения источника энергии по поверхности нагрева целесообразно изменять мощность источника энергии пропорциоНсшьно усредненному на всех элементарных участках сигналу,; соответствующему разности заданной и измеренной температур. При этом сигнал, соответствующий величине коррекции скорости движения источника.энергии на элементарных участках, формируют по сигналу разности между сигналом, соответстзвующим разности заданной и измеренной температур и сигналом, соответствующим среднему значению этих разно.стных сигналов. На фиг. 1 представлен принцип управления движением источника энергии по траектории, аппроксимируемой отрезками прямых на фиг. 2 - функциональная схема устройства управления, движением источника энергии) на фиг. 3 - функциональная схема устройства управления для случая периодического движения источника. Устройство содержит датчик 1 .температурного поля, задатчик 2 температурного поля, элемент 3 сравнения, предназначенный для определения разности измеренной- и заданной темпера-тур, блок 4 управления сканированием, который предназначен для задания траектории движения источника и для управления блоком 5 управления ключами, блок 6 ключей, соединенный информационным входом с выходом элемента сравнения, управляющими входами - с выходами блока управления ключами, а .выходом - со входами первого блока 7 памяти, предназначенного для запоминания сигналов разности заданной и измеренной температур) первый вычислительный блок «, второй блок 9, памяти,, соединенный своим выходом со входом второго вычис.лительного блока 10, который, предназначен для разделения сигнала коррекции на два «сигнала коррекции состав.пяющих скорости по осям; первый 11, второй 12, третий 13 и четвертый 14 блоки коммутаторов, первые два из которых своими информационными входами соединены с выходс1ми блока 10, по которым формируется сигнал коррекции скорости по ортогональным осям, и предназначены для коммути эования сигналов, соответствующих составляющим коррекции скорости по . осям на первые входы первого 15 и второго 16 сумматоров, а два других коммутатора предназначены для коммутирования сигналов, соответствующих ортогональным составляющим заранее заданной скорости, на вторые входы сумматоров и соединены своими входами с первым и вторым выходами задатчика 17 составляющих скорости движения , а выходами - со вторыми входами первого и второго сумматоров} первый 18 и второй 19 интегратор, которые предназначены для интегрирования результирующих сигналов с сумматоров, для чего их входы подключены к выхо-, дам соответственно первого и второго сумматоров; первый 20 и второй 21 пороговые элементы, каждый из которых соединен входом с выходом соответствующего интегратора, а выходом СО входом блока 22 синхронизации и предназначен для фиксации отрезков разбиения траектории, блок 22. предназначен для синхронизации работы коммутатором, выход его подключен одновременно к управляющим входам всех четырех коммутаторов; два блока 23 и 24 управления движением источника нагрева (по ортогональным осям) развертывающие луч в плоскости 25. Работа устройства заключается в следующем. Датчик 1 просматривает участки зоны нагрева по некоторой траектории, задаваемой блоком 4, в котором также программируется скорость движения пятна съема температуры вдоль траектории. Вьщаваемые блокЬм 4 коор динаты пятна съема информации одновременно подаются на входы блока 5, который вызывает последовательное ср батывание ключей блока 6 и запись разности измеренной и заданной температур, которая вычисляется в блоке 3 в соответствующие ячейки блока 7. Таким образом, в памяти-блока получается дискретное отображение о клонения температурного поля нагрев емой поверхности от заданного темпе ратурного поля. Содержимое памяти бл ка 7 перерабатывается по определенному алгоритму блока Ь, на выходе которого сигналы коррекции скорости движения источника на каждом участке траектории, запоминаемые в ячейках блока.9 памяти. В блоке 10 коррекции скорости на каждом участке разделяется на ортогональные составляющие и далее сигналы управления движением источника формируют параллельно по двум каналам для блоков управления движением источника по ортогональным осям. Сигналы составляющих коррекций по ортогональным осям последовательно коммутируются через коммутаторы 11 и-12 на входы сумматоров 15 и Ib а сигналы ортогональных составляющих заданной скорости от блока задания составляющих скорости 17 синхронно коммутируются через блоки 13 и 14 на другие входы сумматора. Суммарные сигналы в обоих каналах интегрируются блоками 18 и 19 и пода ются соответственно на блоки управления движением источника по ортогональным осям 23 и 24. Сигнгшы с выходов интеграторов подаются также на блоки пороговых элементов 20 и 21, где квантуются по уровню в соответствии с разбиением траектории на отрезки, и затем выходные сигналы пороговых элементов используются для управления блоком 22 синхронизации. В соответствии с управляющими сигналами от пороговых элементов в блоке синхронизации производится последовательное переключение управ ляющих сигналов на управляющих входах коммутаторов 11 -. 14, что соответствует движению источника энер гии по отрезкам ломаной, аппроксими рующей заданную траекторию. Функциональная схема устройства управления в случае периодического движения источника энергии (фиг.З; содержит блок 2Ь усреднения сигналов I разности измеренной и заданной температур) , блок 27 элементов сравнения, которые предназначены для определения разности между сигналом, соответствующим разности заданной и измеренной температур,, и сигналом, соответствующим среднему значению этой разности, а также блок 28 управления мощностью источника нагрева, предназначенный для изменения мо.зности источника энергии в соответствии с усредненным сигналом, получаемым на выходеблока 2Ь. Формула изобретения 1. Устройство для лучевого нагрева, содержащее блок управления сканированием, первым выходом подключенный к управляющему входу датчика температурного, поля, выход которого связан с первым входом элемента сравнения, вторым входом связанным с задатчиком температурного поля, а выходом - с входом блока ключей, выходом подключенного к входу последовательно соединенных первого блока Памяти, первого вычислительного блочка и второго блока памяти, а управляющим входом - с выходом блока управления ключами, вход которого связан с вторым выходом блока управления сканированием, а та-кже сумматоры, интеграторы, пороговые элементы, блок синхронизации и блоки управления движением источника нагрева, отличающееся тем, что, с целью упрощения устройства, они содержит первый, второй, третий и четвертый коммутаторы, задатчик составляющих скорости движения источника нагрева и BTopol вычислительный блок, вход которого подключен к выходу второго блока памяти,- а выходы - к одним, входам первого и второго коммутаторов, другие входы которых соединены с соответствующими входами третьего и четвертого коммутаторов и выходом блока синхронизации, входы которого подсоединены к выходам пороговых элементов, входами связанных с выходами соответствующих интеграторов и входами соответствующих блоков управления движением источника нагрева, а выход зсщатчика составляющих скорости движения источника нагрева подключен к другим входам третьего и четвертого коммутаторов, выходами связанных с первыми входами сумматоров , вторые ёходы которых соединены с выходами первогои второго коммутаторов , а выходы - с входами интеграторов. , . 2. Устройство ПОП.1, oтли-r чaющeecя тем, что, с целью расширения области применения, оно содержит блок управления мощностью .
иг.точника нагрева, а первый вычис- ительный блок выполнен в виде по.чедовательно соединенных блока ус|.еднения и блока элементов сравнения, йыходы которого подключены к входам аторого блока памяти, а входы - к 5 выходам первого блока памяти и входам усреднения, выходом соединенного с входом блока управления мощно;;тью источника нагрева.
Источники информации, fg принятые во внимание при экспертизе
1.Куцан Ю,Г. и др. Автоматическое управление электронным лучом пушек при сварке кольцевых швов. Сб. Системы и элементы автоматики, Таллин, 1972.
2.Патент США 3390222, кл. 13-31 опублик. 1968,
3.Авторское свидетельство СССР по заявке № 2542762/24,
кл. G 05 D 23/00, от 31.10.77 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регулирования температуры | 1977 |
|
SU796805A1 |
| Анализатор сигнала тактовой синхронизации | 1990 |
|
SU1781834A2 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство для распознавания образов | 1980 |
|
SU1043691A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| Анализатор сигнала тактовой синхронизации | 1988 |
|
SU1587656A1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРИЧЕСКОЙ РАЗВЕДКИ | 1987 |
|
RU2018884C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Анализатор спектра | 1984 |
|
SU1237987A1 |