1
Изобретение относится к автоматике, в частности к автоматизации электроннолучевых установок.
Известно устройство для управления электроннолучевым нагревом, сох ержащее два фазовращателя, сумматор, три усилителя и двусторонний ограничитель амплитуды сигнала. Синусоидальные напряжения, сдвинутые по фазе на ЭО , подаются через согласующие усилители на электромагнитную отклоняющую систему электронной пушки tl3
Наиболее близким к изобретению по своей технической сущностиявляется устройство для регулирования температуры,содержащее задатчик скорости, первый и второй блоки управления движением источника тепла и последовательно соединенные блок сканирования, датчик температурного поля, первый блок ключей, управляющие входы которого соединены с выходами первого блока управления ключами и первый блок памяти, а также второй блок ключей, управляющие входы которого соединены с выходами второго блока управления ключгили 123
Недостатком этого устройства является низкая точность.
Цель изобретения - повьпиение точности устройства.
Поставленная цель достигается тем, что в него введены интегратор, пороговый элемент, функциональный преобразователь и последовательно соединенные вычислитель, второй блок памяти и блок сумматоров, причем второй выход ; блока сканирования соеди0нен со входом первого блока управления ключами,К выходу первого блока памяти подключен вход вычислителя, другие в-ходы блока сумматоров соединены с выходами задатчика скорости,
5 а выходы через второй блок ключей с первым входом интегратора, выход которого соединен со входом функционального преобразователя и входом порогового элемента, выход поро0гового элемента.подключен ко второму входу интегратора, а выходы функционального преобразователя соединены со входами второго блока управления ключами и со входами перг5вого и второго блоков управления движением источника тепла, а также , тем, что функциональный преобразо- , ватель содержит последовательно соединенные блок вычислени) кривизны траектории и интегральный преобразовутель, выход которогю через синусHiiifi преобразователь подключен ко . ьхолу первого блока интегрирования, а чирез косинусный преобразователь ко входу второго блока интегрирования, причем вход блока вычисления кривизны траектории связан со входо Функционального преобразователя, а ииходы первого и второго блоков интегрирования связаны с выходами функционального преобразователя.
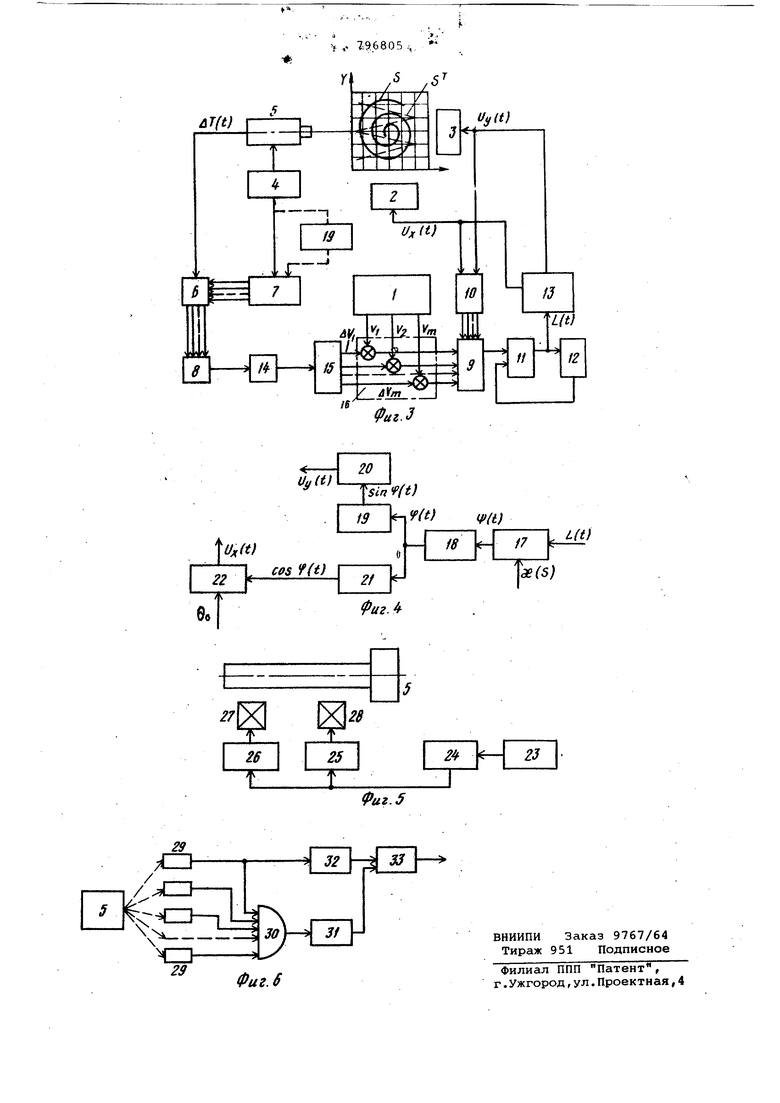
На фиг. 1 показан принцип построения функционального преобразователя для получения сигналов управления движением источника тепла; на фиг. 2 - принцип получения отклоняющих напряжений сигналов управления движением источника тепла с использс9ванием функции кривизны траектории; . 3 - структурная схема устройства для регулирования температуры; на фиг. 4 - структурная схема функционального преобразователя с использованием функции кривизны траектории движения; на фиг.5 структурная схема блока сканировани на фиг. 6 - структурная схема блока сканирования датчиком температурног поля, выполненным в виде оптико-механического сканирующего пирометра.
Устройство для регулирования температуры (см.фиг.З) содержит задатчик 1 скорости, первый 2 и второй 3 блоки управления движением источника тепла и последовательно соединенные блок 4 сканирования, датчик 5 температурного поля, первый блок 6 ключей, управляющие входы которого соединены с выходами первого блока
7управления ключами, и первый блок
8памяти, Е торой блок 9 ключей, управляющие входы которого соединены с выходами второго блока 10 управления ключами, интегратор 11, пороговый элемент 12, функциональный преобразователь 13 и последовательно соединенные вычислитель 14, второй блок 15 памяти и блок 16 сумматоров, причем второй выход блока 4 сканирования соединен со входом первого блока 7 управления ключами, к выходу первого блока 8 памяти подключен вход вычислителя 14, другие входы блока 16 сумматоров соединены с выходами задатчика 1 скорости, а выходы через второй бло
9ключей - с первым входом интегратора 11, выход которого соединен со входом функционального преобразователя 13 и входом порогового элемента 12, выход порогового элемента 12 подключен ко второму входу интегратора 11, а выходы функционального преобразователя 13 соединены со входами второго блока 10 управления ключами и со входами первого 2 и втрого 3 блоков управления движением источника тепла.
Функциональный преоьра-юватель 13 Гcм.фиг.4 содержит последовательно соединенные блок 17 вычисления кривизны траектории и интегральный пре.образователь 18, выход которого через синусный преобразователь 19 подключен ко входу первого блока 20 интегрирования, а через косинусный преобразователь 21 - ко входу второго блока 22 интегрирования, причем входом функционального преобразователя 13 является вход блока 17 вычисления кривизны траектории, а выходами - выходы первого 20 и второго 22 блоков интегрирования.
Блок 4. сканирования (см.фиг.5) в случае использования в качестве датчика 5 температурного поля передающей телевизионной трубки содержит генератор 23 пилообразного напряжения, обеспечивающий периодич ность движения пятна съема инфор-. мации, перестраиваемый функциональный преобразователь 24, на котором можно программировать скорость движения пятна на отдельных участках траектории и который подсоединен своим выходом ко входам нелинейных преобразователей 2 и 26, обеспечивающих нужную траекторию движения пятна съема информации системы 27 и 28 сканирования датчика температурного поля, подключенные к выходам нелинейных преобразователей 25 и 26.
Блок 4 сканирования датчиком 5 температурного поля, выполненным в виде оптико-механического пирометра (см. фиг. б), содержит оптико-механический сканирующий пирометр, ячейки 29 синхронизации, предназначенные для вьщачи сигналов координат пятна съема информации в зоне нагрева, схему 30 ИЛИ, входы которой соединены с выходами ячеек синхронизации , а выход - со входом первого счетчика 31, второй счетчик 32, вход которого соединен с выходом ячейки . синхронизации, соответствующей начальной точке траектории, согласующий блок 33, входы которого соединены с выходами счетчиков 31 и 32, а выходной сигнал используется для управления первым блоком 7 управления ключами. Состав блока 33 определяется типом используемых в блоках и 32 электрических сигналов
Сущность изобретения заключается в следующем.
По поверхности объекта по заданно траектории S с заранее определенней скоростью vTt) движется электронный пучок. С помощью сканирующего датчика 5 температурного поля, пятно съема информации которого проходит по некоторой траектории S по поверхности объекта (причем эта траектори ;МОжет не совпадать с траекторией движения электронного пучка), измеряется температура на поверхности объекта. Поверхность нагрева условноразбивают на п участков. Каждому участку поверхности нагрева соответствует своя ячейка памяти в первом блоке б памяти. Температура тех участков, по которым проходит траектория пптна съема информации, записывается в соответствующих ячейках памяти. Далее информация, записанная в первом блоке 6 памяти, в соответствии с выбранным алгоритмом обрабатывается таким образом, что формируется сигнал коррекции скорости для тех участков поверхности нагрева , по которым проходит траектория движения электронного пучка. Сигнал коррекции скорости пучка для каждого из участков складывается с сигналом, соответствующим заранее определенной скорости движения пучка по траектории и поступающим из задатчика 1 скорости. Таким образом, получают сигнал, соответствующий скорректированной скорости движения пучка на каждом из участков его траектории. Далее путем интегрирования из полученного сигнала формируют периодический во времени сигнал,L(t) соответствующий закону движения пучка вдоль траектории: L(t)kS(t).
Здесь L(t) - величина тока или напряжения сигнала с выхода интегратора в момент t ; S(t) - положение центра электронного пучка на траектории (путь, пройденный электронным пучком вдоль траектории) в момент t;K - коэффициент пропорциональности.,
Далее сигнал L(t) преобразуется в отклоняющие напряжения или токи, которые затем подаются в первый 2 и второй 3 блоки управления движением источника тепла.
Преобразование сигнала t(t) в Зтклоняющие напряжения или токи осуществляется с помощью функционального преобразователя 13, который строится следующим образом. Траектория движения источника тепла разбивается на гп равных по длине участковbS. Участки траектории между точками делений 5.„. S.Sj заменяются отрезками прямых (см.фиг.1 а).
Каждой точке Si , 1 ,2,..т,соответствуют напряжения Стоки) в блоках 2 и 3 управления движением источника тепла:
)( (vW(к4 )
коэффициенты прол Х л XI и у; - крордипорциональности, ., наты точки, Sj,. Если
() - размах периодического сиг нала L(t) , то велич1 на (lj,j-t) делится на m равных частей ftkL i Функциональный преобразователь 13
строится так, чтобы напряжения на его входе о, I,,,, (.,„1 соответствовали напряжениям на выходе функцион льного преобразователя 13 и и -Ux-..U (аналогично и, и и и) по оси у фиг. 16. Тогда, разделив сигнал L(t) на два канала и, осуществляя в каждом канале функциональное преобразование Uj, f..(L) и (..f.. (L) получим движение электронного пучка
по ломаной траектории, близкой к
заданной.
Функциональное преоеэразование сигнала L(t) в напряжения или токи отклонения в блоках 2 и 3 управления движением источника тепла можно выполнить также исходя из известных формул дифференциальной геометрии (см. фиг.2).
и --У-х (S)(S)
1
Uv,(s)(a)(,
где s
x(S)Joo6SJ(5}dS о
vf(6)Jsin1(.S}d& о
nb)--fH$)dS
Здесь x(S) - кривизна траектории в точке Sf
QO - угол наклона вектора касательной, проходящей через начальную точку траектории и оси х
о и УО координаты начала траектории.
Оси координат х и у всегда можно выбрать так, что s I п (или
СОЗЭд 0) и 0
Тогда окончательно получаем
( (S)cos6,
(
)cos©j,
Следовательно, преобразуя, сигнал в последовательности сигналов:
1,н(1)--х.,
2.)-f%(t) .(
Ъ. XCt)-.fU9(f) (C)fU4)(t)
4. (t)-coaeo Uj, ,:if{t)co60o
получаем движение источника тепла вдоль заданной траектории. Датчик 5 температурного поля (фиг.З) просматривает участки зоны нагрева
по траектории S , задаваемой блоком сканирования датчика 4, в котором также программируется скорость движения пятна съема температуры вдоль траектории S . Выдаваемые блоком 4 сканирования координаты пятна съема информации одновременно подаются на вход первого блока
7управления ключами, который вызывает последовательное срабатывание ключей первого блока б ключей и запись текущих значений температуры fiTtf) в соответствующие ячейки первого блока 8 памяти.
Таким образом, в первом блоке
8памяти получается дискретное отображение температурного поля вдоль траектории съема информации. Содержимое я1еек первого блока 8 памяти перерабатывается по определенному алгоритму в вычислителе 14, из которого выдаются величины напряжения коррекции скорости пучка, запоминаемые в ячейках второго блока 15 памяти. Каждое из корректирующих напряжений суммируется в блоке 16 .сумматоров с исходными напряжениями задатчика 1 скорости и результат суммирования подается через соответствующие ключи второго блока 9 ключей, управляемого вто1;5ым блоком 10 управления ключами на вход интегратора 11. При отсутствии корректирующих сигналов
на входе интегратора 11, напряжение на его выходе изменяется пилообразно причем размах пилы определяется параметрами порогового элемента 18, включенного.в обратную связь интегратора 11. В качестве опорного напряжения порогового элемента 12 используется его собственное выходное напряжение, (формированное на иитеграюре 11 напряжение подается на вход функционального преобразователя 13, функция преобразования которого определяется видом траектории перемещения пучка. Выходы функционального преобразователя 13 подключены соответственно ко первого 2 и второго 3 блоков управления движением источника тепла, обеспечивающим пространственное перемещение источника 18 тепла по зоне нагрева.
В зависимости от типа датчика 5 температурного поля, выбранная структура блока 4 сканирования нуждается в дополнительном элементе синхронизации для сопряжения с блоком 7 управления ключами.
Для случая управления сканированием датчика 5 температурного поля, выполненного на основе передающей телевизионной трубки, сигнал, вырабатываемый генератором 23 пилообразного напряжения в блоке сканирования (см. фиг. 5), используется в качестве входного управляющего напряжения перестраиваемого функционального преобразователя 24, на котором программируется скорость передвижения пятна съема в зоне нагрена. Выходной сигнал перестраиваемого функционального преобразовате.пя 24 подается через нелинейные преобразоJ ватели 25 и 26 на отклоняющие катушки 27 и 28 сканирующего датчика 5 температурного поля.
Если,датчик 5 температурного поля выполняется в виде оптико-механичесд кого сканирующего пирометра, то синхронизация-координаты пятна съема S и номера включаемого ключа первого, блока ключей осуществляется блоком 4 сканирования, работающим следующим образом (см.фиг.6).
5 Каждая ячейка 29 синхронизации например, фотодатчик или магнитный датчик), соответствует определенному положению пятна съема информации. рПри движении пятна съема информации
0 соответствующие ячейки 29 синхронизации выдают импульс напряжения. Все ячейки 29 синхронизации подключены через элемент 30 ИЛИ ко входу счетчика 31, на котором подсчитывается номер проходимого пятнам съема участка по одной из координат. Кроме того, первая из ячеек 29 синхронизации подключена ко входу второго счетчика 32, подсчитывающего номер Участка по
о другой координате.
. Выходы счетчиков 31 и 32 подключены ко входам согласующего блока 33, выходной сигнал которого используется в качестве входного сигнала первого
, блока 7 управления ключами.
Технико-экономическая эффективность изобретения состоит в сокращении брака за счет уменьшения количества наплывов и трещин на периферии слитка и улучшения структуры и однородности распределения примесей и легирующих компонентов по всему объему переплавляемого металла..
изобретения
Формула
1.Устройство для регулирования температуры, содержащее задатчик скорости, иервый и второй блоки
л управления движением источника уепла и последовательно соединенные блок сканирования, датчик температурного поля, первый блок ключей, управляющие входы которого соединены с выходами первого блока управления
5 ключами и первый блок памяти, а также второй блок ключей, управляющие входы которого соединены с выходами второго блока управления ключами, отличающееся тем, что, с
О целью повышения точности устройства, в него введены интегратор, пороговый элемент, функциональный преобразователь и последовательно соединенные вычислитель, второй блок памяти и блок сумматоров, причем второй выход
блока сканирования соединен со входом первого блока управления ключами, к выходу первого блока памяти подключен вход вычислителя, другие входы блока сумматоров соединены с выходами эадатчика скорости, а выходы через второй блок ключей - с первым входом интегратора, выход которого соединен со входом функционального преобразователя и входом порогово го элемента, выход порогового элемента подключен ко второму входу интегратора , а выходы функционального преобразователя соединены со входами второго блока управления ключами и со входами первого и второго блоков управления движением источника тепла.
2.Устройство по п.1, отличающееся тем, что функциональный преобразователь содержит
последовательно соединенные блок вычисления кривизны траектории и интегральный преобразователь, выход которого через синусный преобразователь подключен ко входу первого блока интегрирования, а через косинусный преобразователь - ко входу второго блока интегрирования, причём вход блока вычисления кривизны траектории связан со входом функционального преобразователя, а выходы первого и второго блоков интегрирования связаны с выходами Функционального преобразователя.
Источники информации, принятые, во внимание при экспертизе
5
1.Патент США 3390222, кл. 13-31, 1968. ,
2.Авторское свидетельство СССР 482029, кл. Н 05 В 7/00, 1973 (прототип),

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для лучевого нагрева | 1978 |
|
SU949646A1 |
| Устройство управления рабочим циклом при врезном шлифовании | 1986 |
|
SU1400865A1 |
| Устройство для контроля температуры заготовок перед прокаткой | 1990 |
|
SU1763062A1 |
| Способ автоматического контроля температуры поверхности слитка при непрерывной разливке и устройство для его осуществления | 1988 |
|
SU1576228A1 |
| Способ регулирования тока адаптивного электропривода | 1986 |
|
SU1372571A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МАТЕРИАЛОВ | 2009 |
|
RU2392612C1 |
| Устройство для управления процессом электроннолучевого нагрева | 1973 |
|
SU482029A1 |
| Измеритель среднеквадратического значения напряжения одиночного импульса случайной формы и длительности | 1987 |
|
SU1429054A1 |
| Частотный дискриминатор | 1988 |
|
SU1676078A2 |
| Устройство для распознавания сигналов | 1983 |
|
SU1101853A1 |
Tft)
6o
Фиг.З
u г/if/
pTs;
Фиг. 4
«2.