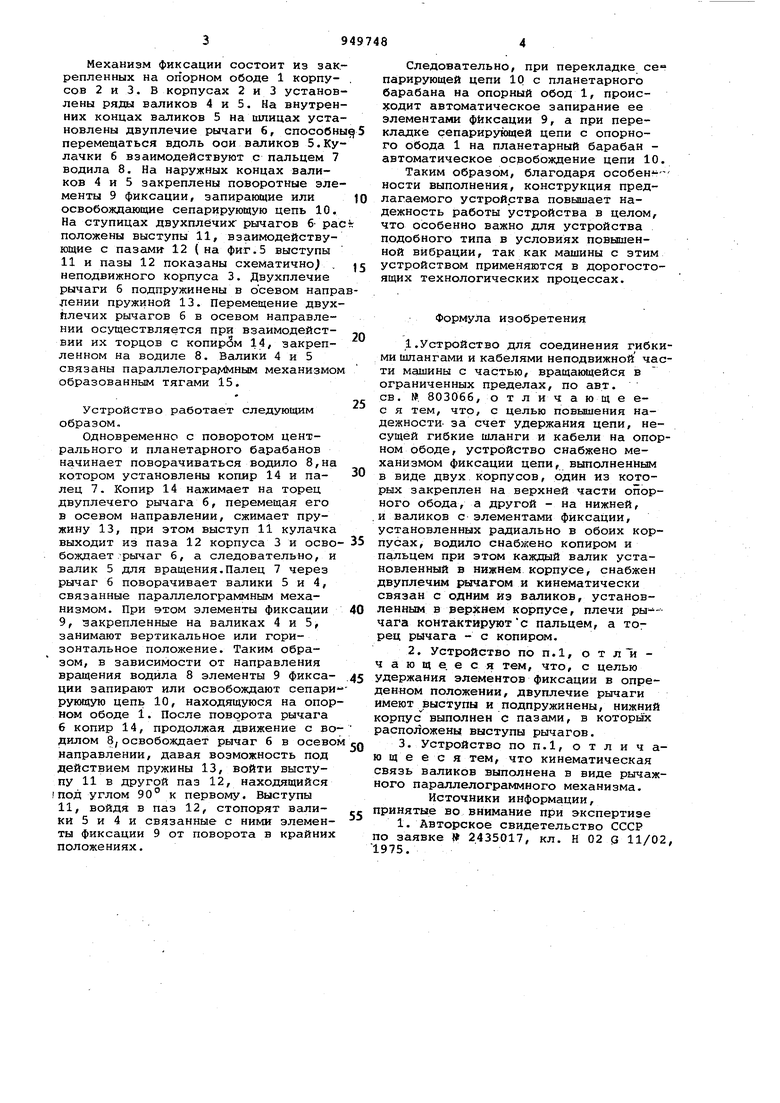
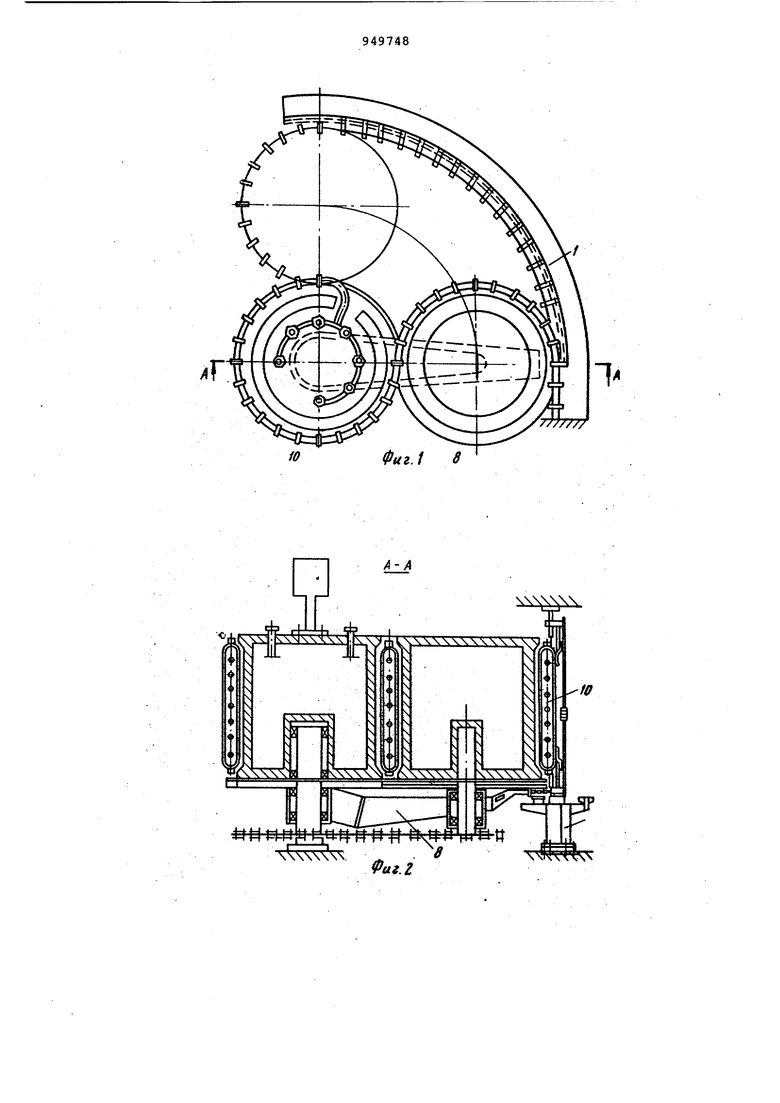
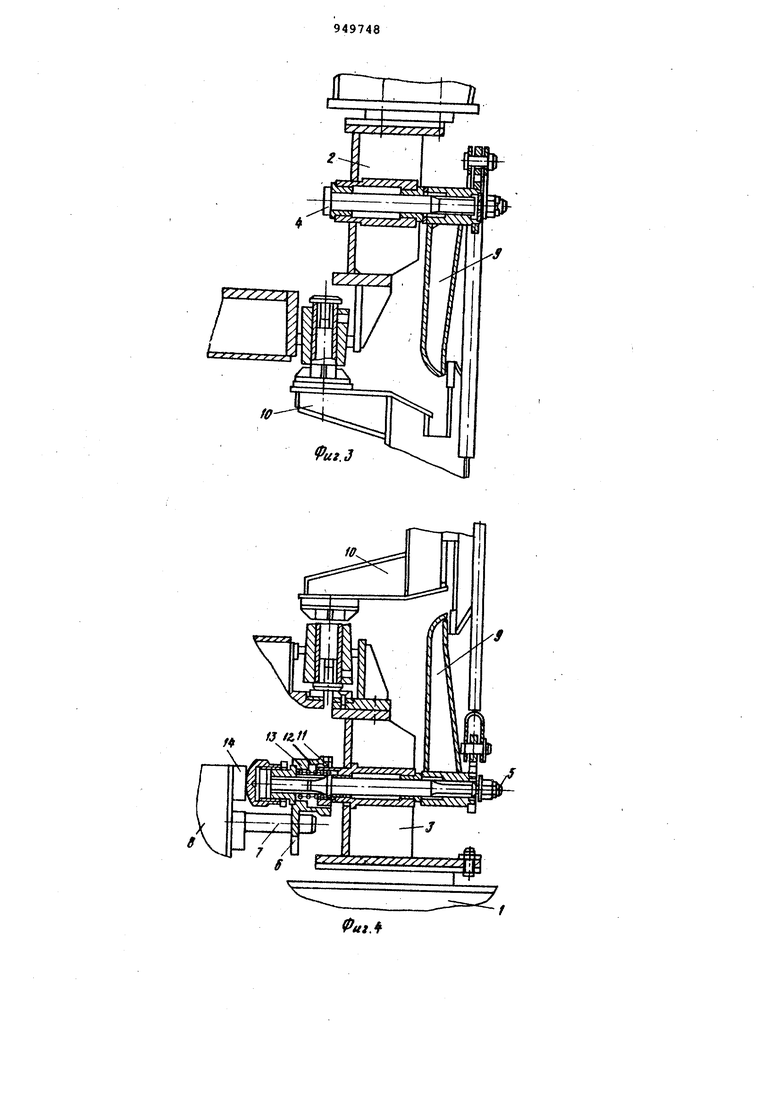
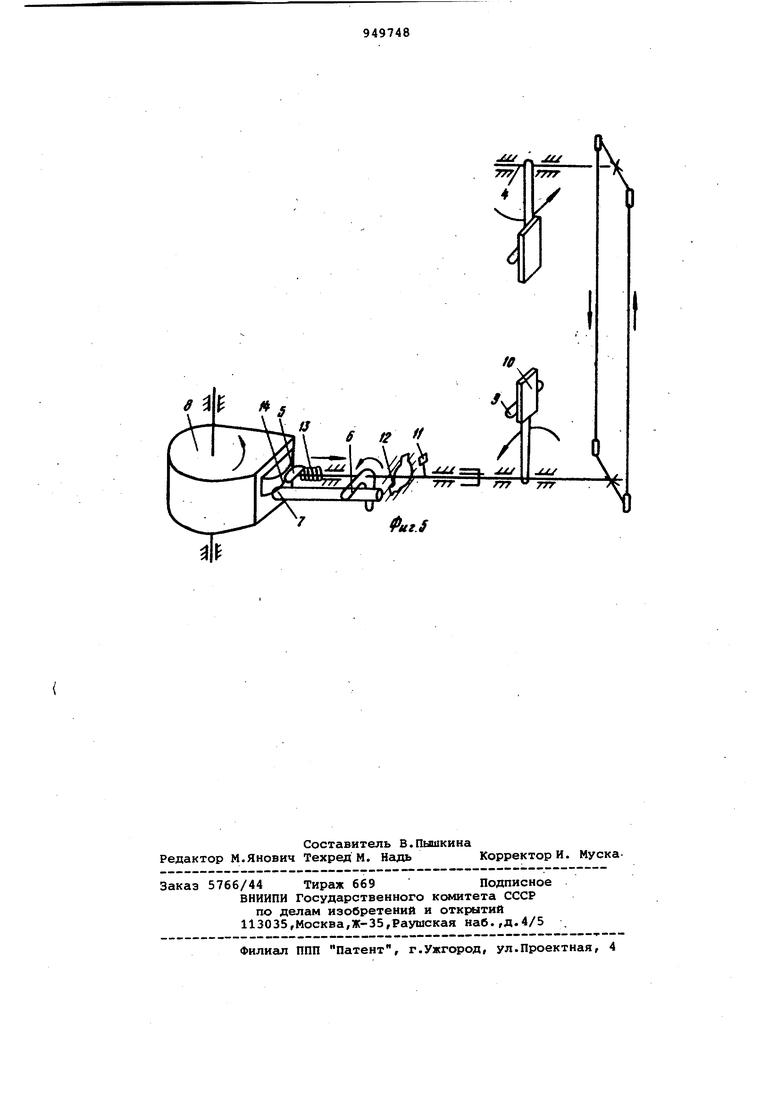
Механизм фиксации состоит из закрепленных на опорном ободе 1 корпусов 2 и 3. В корпусах 2 и 3 установлены ряды валиков 4 и 5. На внутренних концах валиков 5 на шлицах установлены двуплечие рычаги 6, способны перемещаться вдоль оси валиков 5.Кулачки 6 взаимодействуют с пальцем 7 водила 8. На наружных концах валиков 4 и 5 закреплены поворотные элементы 9 фиксации, запиракяцие или освобождающие сепарирующую цепь 10. На ступицах двухплечих рычагов б- рас положены выступы 11, взаимодействующие с пазами 12 ( на фиг.5 выступы 11 и пазы 12 показаны схематично) , неподвижного корпуса 3. Двухплечие рычаги б подпружинены в осевом напралении пружиной 13. Перемещение двухйлечих рычагов б в осевом направлении осуществляется при взаимодейстВИИ их торцов с копиром 14, закрепленном на водила 8. Валики 4 и 5 связаны пapaллeлoгpa flмным механизмом образованным тягами 15.
Устройство работает следующим образом.
Одновременно с поворотом центрального и планетарного барабанов начинает поворачиваться водило 8,на котором установлены копир 14 и палец 7. Копир 14 нажимает на торец двуплечего рычага б, перемещая его в осевом направлении, сжимает пружину 13, при этом выступ 11 кулачка выходит из паза 12 корпуса 3 и освобождает-рычаг 6, а следовательно, и валик 5 для вращения.Палец 7 через рычаг б поворачивает валики 5 и 4, связанные параллелограммным механизмом. При этом элементы фиксации 9, закрепленные на валиках 4 и 5, занимают вертикальное или горизонтальное положение. Таким образом, в зависимости от направления вращения водила 8 элементы 9 фиксации запирают или освобождают сепари рующую цепь 10, находящуюся на опорном ободе i. После поворота рычага б копир 14, продолжая движение с водилом 8,освобождает рычаг б в осевом направлении, давая возможность под действием пружины 13, войти выступу 11 в другой паз 12, находящийся под углом 90° к первому. Выступы 11, войдя в паз 12, стопорят валики 5 и 4 и связанные с ними элементы фиксации 9 от поворота в крайних положениях.
Следовательно, при перекладке се парирующей цепи 10 с планетарного барабана на опорный обод 1, проис3|содит автоматическое запирание ее элементами фиксации 9, а при перекладке сепарирукицей цепи с опорного обода 1 на планетарный барабан автоматическое освобождение цепи 10.
Таким образом, благодаря особен ности выполнения, конструкция предлагаемого устройства повышает надежность работы устройства в целом, что особенно важно для устройства подобного типа в условиях повышенной вибрации, так как машины с этим устройством применяются в дорогостоящих технологических процессах.
Формула изобретения
1.Устройство для соединения гибкими шлангами и кабелями Неподвижной части машины с частью, вращаницейся в ограниченных пределах, по авт. св. №. ЗОЗОбб, отличающеес я тем, что, с целью повышения надежностИ за счет удержания цепи, несущей гибкие шланги и кабели на опорном ободе, устройство снабжено механизмом фиксации цепи, выполненным в виде двух корпусов, один из которых закреплен на верхней части опорного обода, а другой - на нижней, .и валиков с элементами фиксации, установленных радиально в обоих корпусах, водило снабжено копиром и пальцем при этом каждый валик установленный в нижнем корпусе, снабжен двуплечим рычагом и кинематически связан с одним из валиков, установленным в верхнем корпусе, плечи ры-чага контактируютс пальцем, а торец рычага - с копиром.
2. Устройство ПОП.1, а ю щ е. е с я тем, что, с целью удержания элементов фиксации в опреденном положении, двуплечие рычаги имеют выступы и подпружинены, нижний корпус выполнен с пазами, в которьах расположены выступы рычагов.
3. Устройство ПОП.1, отличаю щ е е с я тем, что кинематическая связь валиков выполнена в виде рычажного параллелограммного механизма.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2435017, кл. Н 02 G 11/0 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для соединения гиб-КиМи шлАНгАМи и КАбЕляМи НЕпОд-ВижНОй чАСТи МАшиНы C чАСТью,ВРАщАющЕйСя B ОгРАНичЕННыХ пРЕ-дЕлАХ | 1976 |
|
SU803066A1 |
| Патрон бурового станка | 1981 |
|
SU950891A1 |
| СТАРТЕР ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2607435C2 |
| Устройство для подготовки радиоэлементов с осевыми выводами к монтажу | 1986 |
|
SU1370805A2 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ЦЕПИ | 2003 |
|
RU2257991C2 |
| Устройство для разделения грузов | 1978 |
|
SU768723A1 |
| ПУСКОВОЕ УСТРОЙСТВО | 1991 |
|
RU2048653C1 |
| Шаговый конвейер для перемещения деталей к рабочим позициям | 1984 |
|
SU1221096A1 |
| МЕХАНИЧЕСКИЙ РЕГУЛЯТОР | 1971 |
|
SU436335A1 |
| Устройство для базирования деталей | 1986 |
|
SU1366357A1 |
А-А
Vif
S 44VvWifi
в
Фаг. г
J f
Фиг.З
