СЗ) МЕХАНИЧЕСКИЙ ИНТЕГРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для графического интегрирования | 1980 |
|
SU951324A1 |
| Интегратор | 1938 |
|
SU56663A2 |
| Кулисно-рычажный механизм интеграфа Мамырина | 1988 |
|
SU1539796A1 |
| Интегрирующее устройство | 1975 |
|
SU710047A1 |
| Прибор для вычерчивания кривых второго порядка | 1980 |
|
SU925682A1 |
| Прибор для воспроизведения кривых | 1986 |
|
SU1362670A1 |
| Механизм для преобразования окружности в кривые 3-го и 4-го порядка | 1980 |
|
SU901067A1 |
| Чертежный прибор | 1980 |
|
SU895723A1 |
| Прибор для вычерчивания аксонометрических проекций | 1983 |
|
SU1094760A1 |
| Прибор для построения панорамной перспективы | 1974 |
|
SU517520A1 |
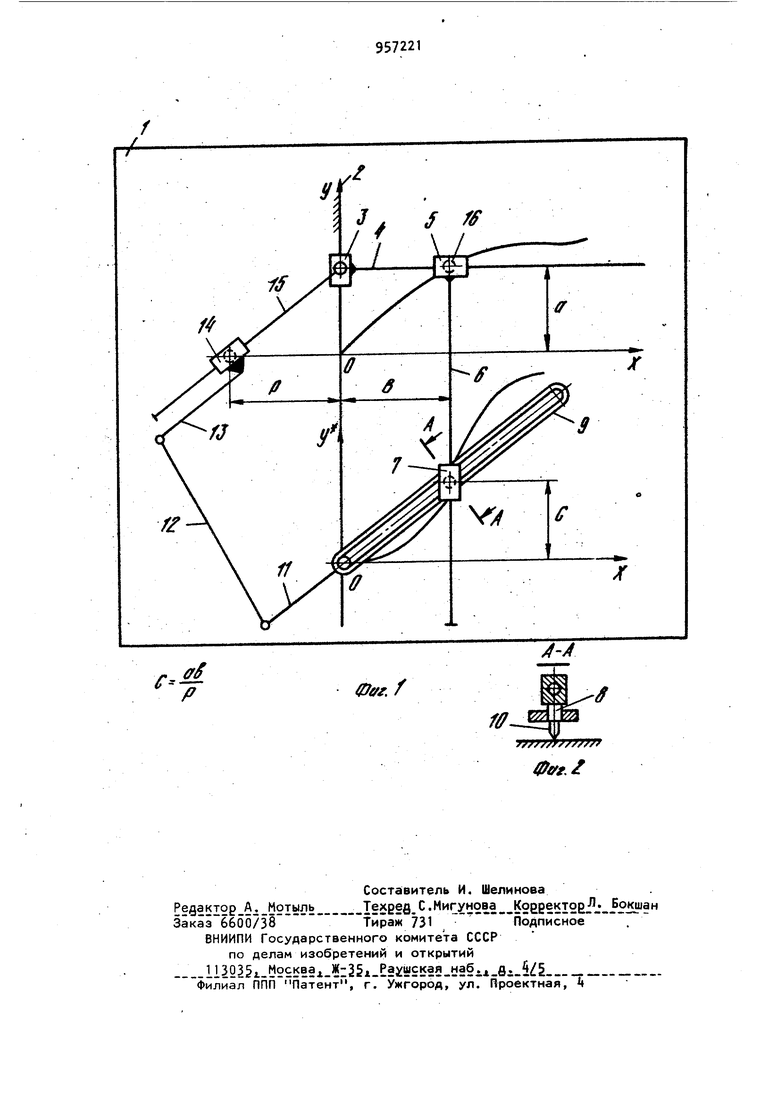
Изобретение относится к механическим вычислительным средствам и может быть использовано для интегрирования дифференцирования функций вида F(x) Ах(х). Известны механизмы для графическо го дифференцирования и интегрировани содержащие планшет и укрепленную на нем первую направляющую с первой кареткой, которая движется по направляющей с помощью ножевогО колеса, ко торое вращается вокруг оси второй каретки, движущейся по второй направ ляющей, перпендикулярной первой йаправпяющей, третью каретку, которая движется по второй каретке параллель но первой направляющей, кулису, связанную шарнирно с ножевым колесом и третьей кареткой 1 и 2. Недостатками известных механизмов являются низкая точность, обусловлен ная постоянством масштаба решения задач, и неудобство в практическом исЛользоваиии, Цель изобретения повышение удобства в эксплуатации и повышение точ-; ности за счет обеспечения возможности изменения масштаба. Указанная цель достигается тем, что в механический интегратор, содержащий планшет и укрепленную на нем по оси У первую направляющую с первой кареткой, на которой неподвиж но закреплена перпендикулярно первой направляющей вторая направляющая с второй кареткой, при этом на второй каретке закреплен обводнойк штифт и третья направляющая, перпендикулярно второй направляющей, с третьей карет кой, на которой закреплен второй обводной штифт, дополнительно введены направляющая планка, параллелограммный механизм, кулиса и поворотная втулка, причем третья каретка снабжена пальцем, .который входит в паз аправлящей планки, образуя с ней поступательную кинематическую пару, направляющая планка шарнирно прикреплена к планшету в начале кОордйнат искомой функции и жестко соединена с звеном параллелограммного механизма, связанным посредством смежного звена с прртивоположным.звеном, жестко закрепленным на направляющей втулке, установленной шарнирно на планшете на оси X слева от начала координат, через направляющую втулку, пропущена кулиса, шарнирно связанная с первой кареткой. На фиг. 1 представлена схема интегратора, вид в плане; на фиг. 2 разрез А-А фиг. 1 (соединение обводного шрифта с направляющей ,планкой), Интегратор содержит планшет 1, на котором неподвижно установлена первая направляющая 2 с первой кареткой 3, на каретке 3 неподвижно установле на вторая направляющая k перпендикулярно первой направляющей с второй кареткой 5, на которой неподвижно установлена третья направляющая 6 перпендикулярно второй направляющей с третьей кареткой, снабженной пальцем 8, который входит в паз направляющей планки 9, внутри пальца 8 закреплен первый обводной штифт 10. Направляющая планка 9 закреплена шарнирно на планшете 1 и жестко соединена с рычагом 11 параллелограммно го механизма, состоящего из .звеньев 11-13. Звено 13 параллелограммного меха низма жестко закреплено на поворотно втулке Т, шарнирно закрепленной на планшете на продолжение оси X слева от начала координат. Через поворотную втулку 14 пропущена кулиса 15, шарнирно закрепленная на первой каретке 3. Вторая каретка 5 снабжена вторым обводным штифтом 16. При обводе заданной кривой Y f ( рбводным штифтом 16 обводной штифр 1 вычерчивает кривую Y Ах (Х)0 При обводе заданной кривой обводным штифтом 10 обводной штифт 16 выFfxlчерчивает кривую Y Ах Из чертежа ясно, что Y x.tgd x i (ху) 1х.(х) Ах(х). Меняя угол установки направляющей планки, получаем - -« у x-tgd,; . Т у Ptgct; if X:tgci/ . tgdi у p-tgcsL p-tgd ((, .е. изменяя расстояние Р и угол накона направляющей планки мы получаем озможность менять коэффициент А -.tg сС в широких пределах. p-tgd Таким образом, предлагаемый интегратор удобнее в эксплуатации по сравнению с известными и позволяет решать задачи с более высокой точнЬСтью. формула изобретения Механический интегратор, содержащий планшет и .укрепленную на нем по оси Y первую направляющую с первой кёреткой, на которой неподвижно закрепена перпендикулярно первой направляющей вторая направляющая с второй кареткой, при этом на второй каретке закреплен обводной шрифт и третья направляющая, перпендикулярно второй направляющей, с третьей кареткой, на которой закреплен второй обводной штифт, отличающийся тем, что, с целью повышения точности за . счет обеспечения возможности изменения масштабаг решения задач и повышения удобства в эксплуатации, он содержит направляющую планку, параллелограммньгй механизм, кулису и поворотную втулку, причем третья каретка снабжена пальцем, который вxoдиt Ё паз направляющей планки, образуя с ней поступательную кинематическую пару, направляющая планка шарнирно прикреплена к планшету в начале координат искомой функции ижестко соединена со. звеном параллелограммного механизма, связанным посредством смежного звена с противоположным зве-. ном, жестко закрепленным на направляющей втулке, установленной на планшете на оси X слева от начала координат, через направляющую втулку пропущена кулиса, шарнирно связанная с первой кареткой. Источники информации, принятые во внимание при экспертизе, 1.Авторское свидетельство СССР If 710047, кл. G 06 G 3/08, 1975. 2.Артоболевский И.И. Механизмы в современной технике. Т.П. М., Наука, 1979, с. 323.
ffs
/-/
Ф&г, f
0fff,l
