(54) МЕХАНИЗМ ОРИЕНТАЦИИ И ФИКСАЦИИ ЭКРАНОВ И КОНУСОВ КИНЕСКОПОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ КРЕПЛЕНИЯ ГЕТТЕРА В БАЛЛОНЕ ЦВЕТНОГО КИНЕСКОПА И УСТРОЙСТВО ДЛЯ УСТАНОВКИ ГЕТТЕРА В КОЛБУ ЦВЕТНОГО КИНЕСКОПА | 1990 |
|
RU1732794C |
| Устройство для спуска и подъема объектов | 1982 |
|
SU1082751A1 |
| Сверлильный станок | 1985 |
|
SU1355369A1 |
| Устройство для обработки фасок стеклоизделий | 1975 |
|
SU618266A1 |
| Установка для аргонодуговой сварки поворотных стыков труб неплавящимся электродом с подачей присадочной проволоки | 1990 |
|
SU1776528A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ ШВОВ ТРУБ | 1989 |
|
SU1623421A1 |
| Способ монтажа ленточной взрывозащиты электронно-лучевой трубки и устройство для его осуществления | 1989 |
|
SU1732395A1 |
| Автомат для мерной резки маркировки и сматывания электромонтажных проводов | 1976 |
|
SU663010A1 |
| Устройство для растяжения движущейся мебельной ткани | 1976 |
|
SU705029A1 |
| Транспортное средство для перевозки газовых баллонов | 1989 |
|
SU1710395A2 |
1
Изобретение относится к производству баллонов кинескопов.
Известны механизмы ориентации и фиксации баллонов кинескопов, в которых ориентация баллонов кинескопов производится подпружиненными роликами. Каждый ролик имеет свою пружину. Обеспечить точность ориентации при такой конструкции невозможно. Поэтому данный механизм применяется лишь для предварительного базирования 1.
Известен также механизм ориентации и фиксации экранов кинескопов, содержащий три пары шарнирных упоров, каждый из которых закреплен на держателе, попарно соединенных между собой 2.
При этом каждая пара упоров приводится в действие от отдельного пневмопривода, что делает невозможным передачу на шарнирные упоры одинаковых усилий, а значит неизбежны перекосы и погрешности ориентации. Увеличению погрешности ориентации способствует также наличие различных по величине зазоров в кинематических парах. Известный механизм не обладает универсальностью, так как предназначен для ориентации только одного типоразмера экрана кинескопов и применяется в процессе контроля только одного параметра.
Цель изобретения - повышение точности ориентации и фиксации экранов и конусов кинескопов и регулирование усилия фиксации, а также обеспечение перестройки для контроля различных типоразмеров экранов и конусов и осуществление возможности контроля экранов и конусов по нескольким параметрам.
Поставленная цель достигается тем, что в механизме ориентации и фиксации экранов и конусов кинескопов, содержащем три пары шарнирных упоров, каждый из которых закреплен на держателе, попарно соединенных между собой, имеются канатики для соединения держателей между собой и t приводом а также устройство для регулирования усилий их натяжения, причем держатели шарнирных упоров выполнены в виде рычагов, при этом ведущие рычаги соединены канатиком, один конец которого соединен с приводом, а другой с устройством регулирования усилия натяжения, а попарное соединение рычагов осуществляется канатиками с расположенными на них устройствами регулирования усилия натяжения, дающими возможность их синхронного поворота во взаимно противоположных направлениях.
Рычаги снабжены планками с центрирующими штырями для фиксации переустанавливаемых шарнирных упоров.
Привод механизма и рычаги расположены за пределами рабочей зоны контролируемых экранов и конусов.
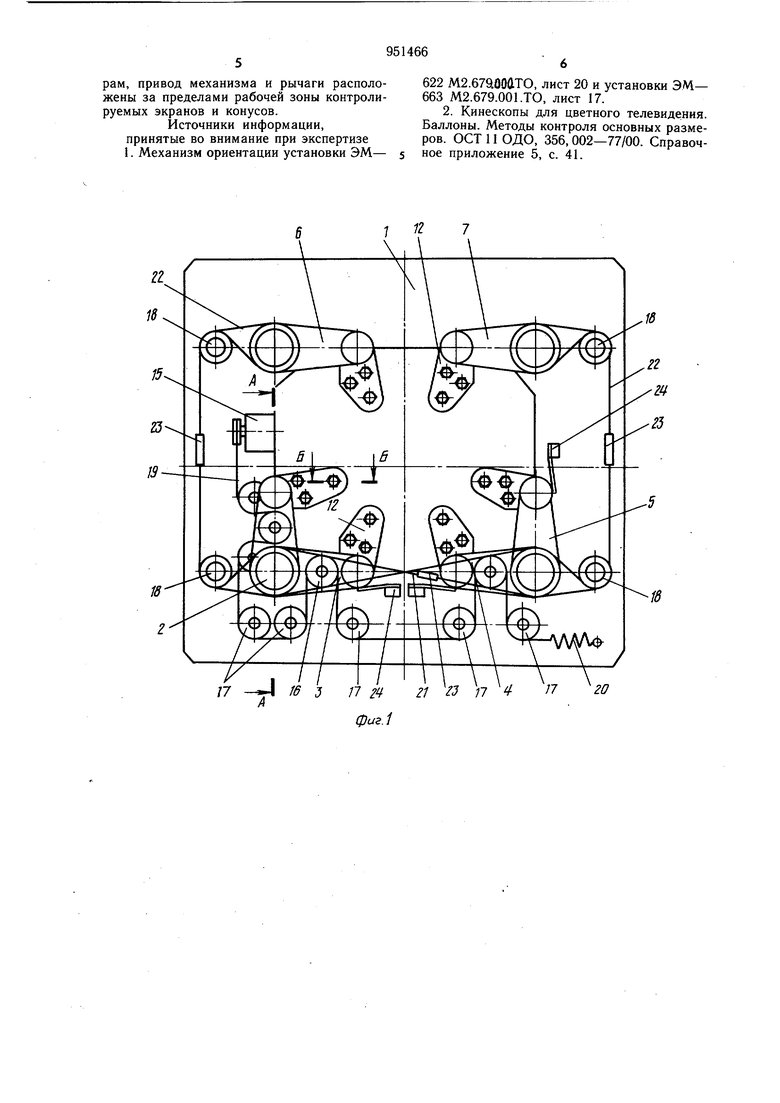
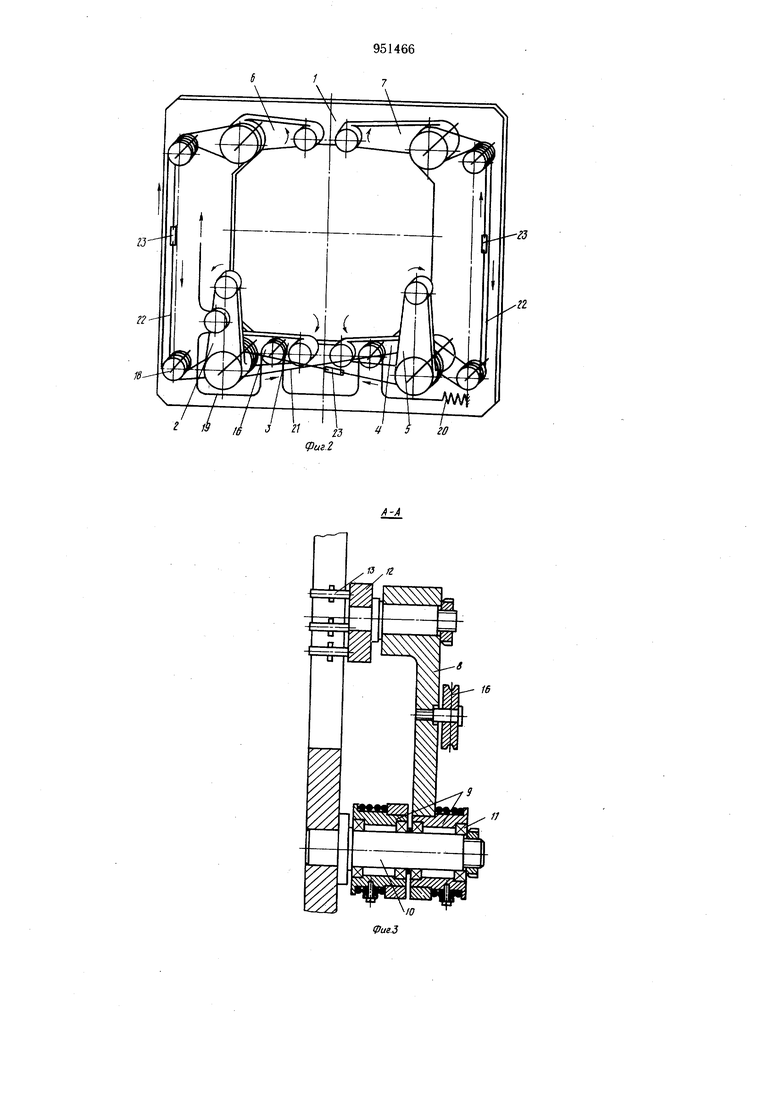
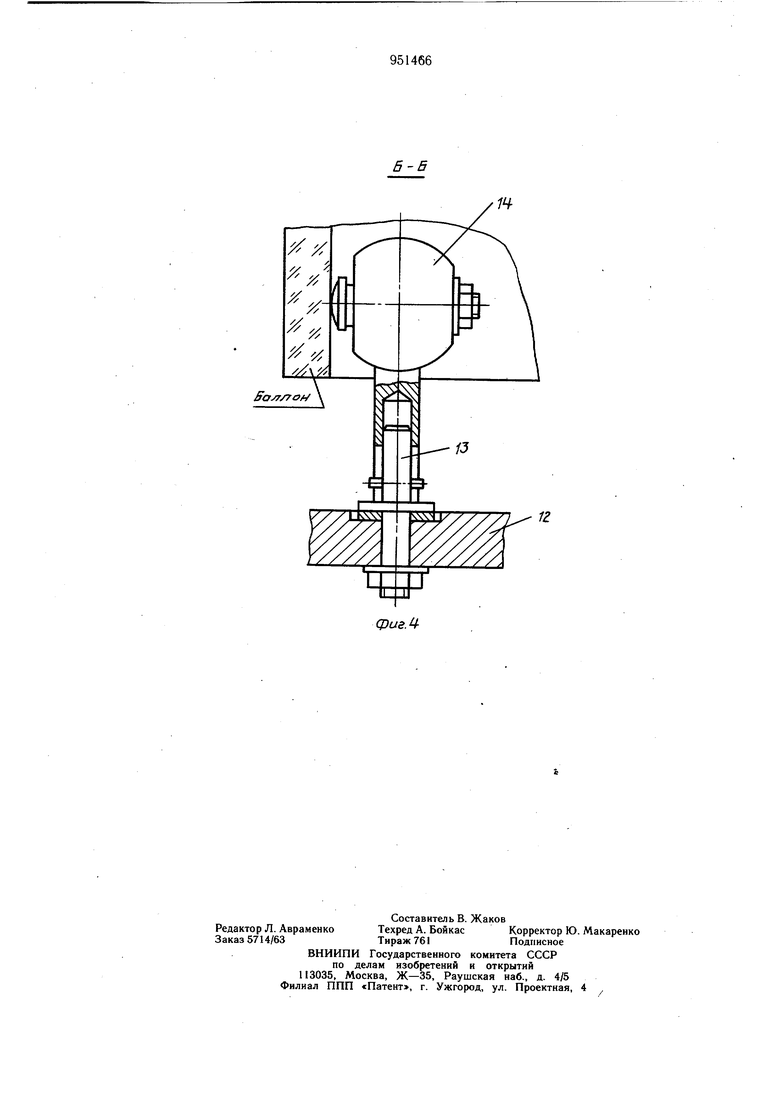
На фиг. 1 изображен предлагаемый механизм, общий вид; на фиг. 2 - кинематическая схема механизма; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1.
На основании 1 размещены три ведущих рычага 2, 3 и 4 и три ведомых рычага 5, 6 и 7. Ведущие и ведомые рычаги аналогичны по своей конструкции и состоят из корпуса 8, закрепленного на барабане 9, который установлен на неподвижной оси 10 и свободно вращается благодаря наличию подшипников 11. На других концах рычагов закреплены планки 12 с центрирующими щтырями 13 для фиксации переустанавливаемых шарнирных упоров 14. Все рычаги и электропривод 15 расположены за пределами рабочей зоны баллонов. На ведущих рычагах 2, 3 и 4 установлены три свободно вращающиеся ролика 16. На основании 1 установлены направляющие ролики 17 и сдвоенные ролики 18. Все они свободно вращаются на своих осях. Ведущие рычаги 2, 3 и 4 через ролики 16 соединены контактом 19 натяжения, который одним концом закреплен на барабане электропривода 15, а другим - к устройству 20 регулирования усилия натяжения. Ведущий 2 и ведомый 5 рычаги соединены между собой канатиком 21, ветви которого перекрещены и неподвижно закреплены на соответствующих барабанах 9. Ведущие и ведомые рычаги 3-7 через сдвоенные ролики 18 попарно соединены между собой канатиками 22, также неподвижно закрепленными на соответствую щих барабанах 9. Канатики натяжения снабжены устройствами 23 для регулирования натяжения. Каждая пара рычагов - ведущий и ведомый - снабжена пластинчатой пружиной 24 возвратного хода.
Электропривод приводится во вращение и натягивает канатик 19, который через ролик 16 одновременно и на одинаковую величину повернет ведущие рычаги 2, 3 и 4 в направлениях, противоположных относительно друг друга. Ведомые рычаги 5, 6 и 7 под действием усилий натяжения, возникаю1цих в ветвях канатиков 21 и 22, синхронно с ведущими рычагами 2, 3 и 4 повернутся во взаимное противоположных направлениях. При этом шарнирные упоры 14, размещенные на планках 12, осуществляют ориентацию и фиксацию баллонов.
Возврат ведущих рычагов 2, 3 и 4 и соединенных с ними ведовых рычагов 5, 6
и 7 в исходное положение осуществляется под действием трех пластинчатых пружин 24 при реверсе электропривода.
Перестройка механизма на другие типоразмеры баллонов производится перестановкой шарнирных упоров 14 на соответствующие установочные штыри 13.
Испытание опытного образца механизма ориентации и фиксации экранов и конусов цветных кинескопов показывают, что равномерность распределения погрешностей повыщается по сравнению с серийно выпускаемым механизмом базирования МЗ.739242 на 16,50/0.Предусмотренная в конструкции возможность перестройки на три типоразмера баллонов кинескопов с размерами по диагонали 51,61 и 67 см. позволяет создать одну установку взамен трех требуемых.
Вынесение узлов и деталей механизма за пределы рабочей зоны баллонов обеспечивает свободный доступ к контролируемым поверхностям, позволяет применять данный механизм не только в установках для контроля высоты и неперпендикулярности экрана, но и в установках контроля сферы, контроля положения фиксаторов, периметра экра нов и конусов кинескопов.
Формула изобретения
. Механизм ориентации и фиксации экранов и конусов кинескопов, содержащий три пары шарнирных упоров, каждый из которых закреплен на держателе, причем держатели попарно соединены между собой, отличающийся тем, что, с целью повыщения точности ориентации и фиксации экранов и конусов кинескопов и регулирования усилия фиксации, механизм снабжен канатиками для соединения держателей между собой и с приводом, а также устройствами для регулирования усилий их натяжения, причем держатели шарнирных упоров выпол нены в виде рычагов, при этом ведущие рычаги соединены канатиком, один конец которого соединен с приводом, а другой - с устройством регулирования усилия натяжения, а попарное соединение рычагов осуществляется канатиками с расположенными на них устройствами регулирования усилия натяжения для их синхронного поворота во взаимно противоположных направлениях.
3-. Механизм по пп. 1 и 2, отличающийся тем, что, с целью осуществления контроля экранов и конусов по нескольким параметрам, привод механизма и рычаги расположены за пределами рабочей зоны контролируемых экранов и конусов.
Источники информации, принятые во внимание при экспертизе 1. Механизм ориентации установки ЭМ-
622 M2.679100UTO, лист 20 и установки ЭМ- 663 М2.679.001.ТО, лист 17.
