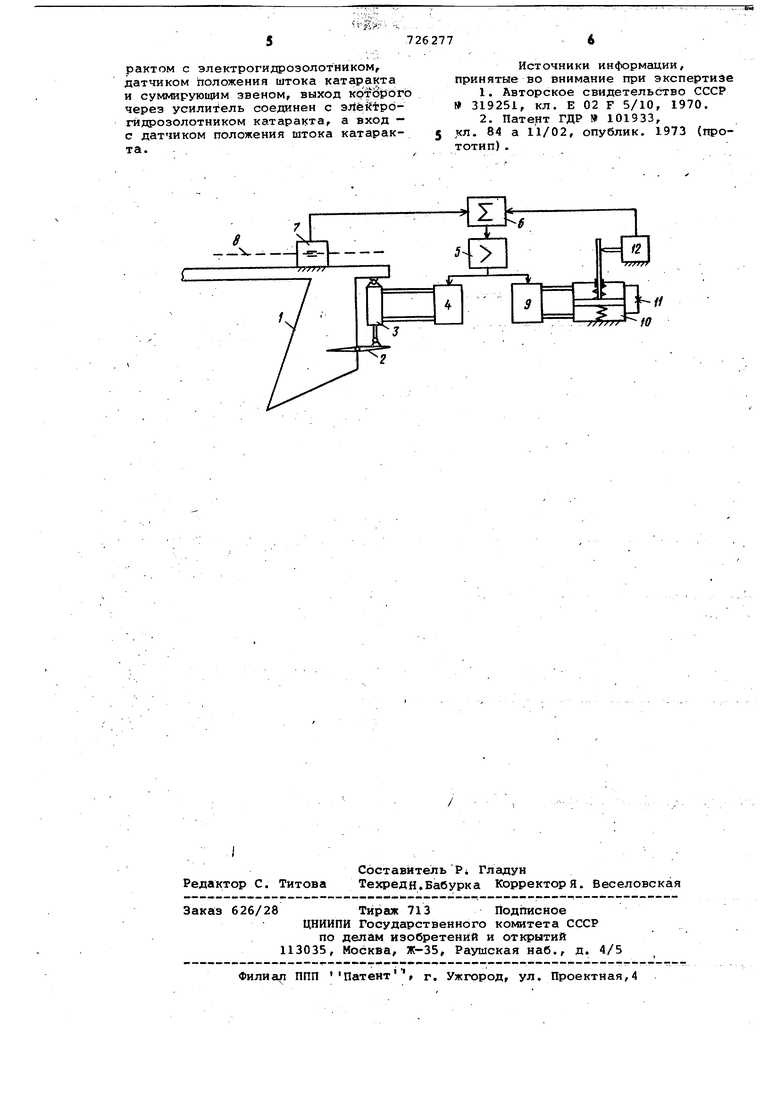
Изобретение относится к строитель ному и дорожному машиностроению, в частности к бестраншейным дреноукладчикам с ножевым рабочим органом пассивного типа, на котором шарнирно закреплены средства управления его высотным положением, например, в виде поворотных лопастей, обеспечивающих опору ножа на грунт и управляемых, например, с помощью гидроцилиндров. Оно может также относиться к машинам, например гусенич ым бетоноукладчикам, используемлм для.бетонирования дорожного полотна или ложа канала в тех условиях, когда эти машины оснащаются устройством автоматического управления. Автоматическое управление положением рабочего органа землеройной машины может осуществляться с помощью известных средств, например копирных. Известна копирная система управ ления, которая используется, например, на экскаваторе ЭТЦ-202 1. Эта система включает -датчик высотного по ложения, копир (натянутый трос, опти ческий луч или т.п.), усилитель и исполнительный гидроцилиндр с электр гидрозолотником. Применение таких систем для управления рабочими органами пассивного типа с поворотными лопастями делает процесс управления неустойчивым, а траекторию рабочего органа волнообразной со значительным размахом колебаний его высоты от среднего положения. Поэтому такие системы непригодны для устройств с поворотными лопастями. Известно устройство для управления положением рабочего органа землеройных мгшшн, включающее датчик полот жения рабочего органа, усилитель, электрогидрозолотник, гидроцилиндр управления и вспомогательный механизм, соединенный с рабочим органом 2. .Поскольку объект регулирования рабочий орган с поворотными лопастями и гидроцилиндр - как последовательно соединенные звенья системы регулирования обладают интегрирующими свойствами, то в целом система регулирования является астатической второго порядка. В результате возможен выход системы за пределы своей области устойчивости в рабочем режиме, и, как следствие, снижение точности управления. В таком устройстбе оттслонени е pa6o4e1 ti&f taf{ )i6 VeptyiK5am от требу ёмого положения, выходящее за пре , зоны нечувствительности, вызывает соотве ст вуюдай сйГгнал дат .чика. Этот сигнал, усиленный и преоб разованный сойтветствуюадими звеньями системы, вызывает .:оворот поворотных Шёме нтовв сторону ликШда1№Йво никшего отклонения. Поскольку сигнал датчика отличается от нуля вплотьдо ; выхода датчика на копирную ; линию, по§6р6тный элемент в момёнт исчезновения сигнала не занимает равновесного положения и рабочий 6р,ган отключаётся в обратнуй стбронх. Вследствие больших раэмахов пог - вьротных элёмёнТ(Эв движение рабочего органа происходит с большими отклоне ниями от копирной линий, что определяет низкую точность упр авЯения положением рабочего органа по высоте. Цель изобретения - повьшение нОйти упр:анления. :,,.„:.ГГ;;.;;:,Т:Г1;.,Г. Эта Цель достигается за ,счёт .. -vryro- что известное устройство снаб 1Ш№б №даайЛй ёеким катарактом с эЛектрогидрозолотником, датчиком - -}Голожё}1Ияшток а катаракта и, сумми -реющим звеном, выход которого через усилитель соединен с эЛектрогидрозолотником катаракта, а вход с датчиком положения штока катаракта. На чертеже изображена схема устройства для управления положением рабочего органа. Рабочий орган 1 дрёноукладчйка снабжен поворотными лопастями 2, с гидрбцилиндром 3 их поворбта, установленным между лопастя 2 й ножёвым рабочим органб 1. Тйдроцилйндр 3 сбёЯййен с электрогИ;пр;рзолотником 4, который в Ййбк)очё|: ё;Е(Ь связан ЭлектрическиС усилителем 5, вход S°. с выходом суммирующего jsiseWa б. .... ,;.,.™.I.,:V. На ножевом рабочем Органе 1 установлен датчик 7, йапрймёр, кЬпйрного типа, связанный с копирной линией 8 Выход датчйка 7ШГдйй ё-Г--с-Ш Ш-- из, Выгодой суммирующего звена 6. Выход усилителя 5 соединён также с элёктрогидрозолотником 9 гидравлического катаракта 10, имеющего дроссель 11. Второй вход суммирующего звена б связан с датчиком положений штока катаракта. Датчики 7 и 12 и катаракт 10 уета1МОвлёны неподвижно относитель но рабочего органа, что показано ... -. ...... r,.j.v:.,-.-.-.-:j«:- vi.v.,-,,c ,....ttsv i-ia--ss на чертеже штриховкой. Датчики 7 и 12 должны быть соеди нень с суммирующим звеном, следующего правила знаков: сигнал откло|Нениядатчика 7 от копирной линии должен , вызывать такое срабатывание золотника 9, которое создает на выходе дат чика 12 сигнал, имеющий знак, обратный знаку д-йствующего сигнала датчика 7. . Устройство работает следующим образом. 6 равновесном положении копирная иния 8 находится в зоне нечувствительности датч lica 7. Поворотная лопасть 2 занимает такое положение, при котором вертикальная проекция всех внешних сил, действующих на рабочий орган 1, равна нулю. Поршень катара.кта 10 находится в среднем положении, в котором обе его пружины 11агруженЫ симметрично . Выходные сигналы обоих датчиков 7 и 12 равнынулю. . При отклонении рабочего органа 1, а вместе с ним и датчика 7 от копирной линии , на выходе датчика возникнет сигнал, который, пройдя через звено 6 н усилитель 5, включит злектрогидрозолотник 4, и гидроцилиндр 3 .поворачивает лопасти 2, Что вызывает вертикальное перемещение ножа 1, направленное на устранение его отклонения от копирной линии 8.Одновременно с поворотом лопасти 2 включается злектрогидрозолотник 9 и приходит; в движение поршень катаракта 10. На выходе датчика 12 появится сигнал, знак которого противЬположен знаку СИffTaLna датчика 7; Сигнал на . входе усил.ителя 5 уменьшается, и поворот лопасти прекращается раньше, чем ошибка регулирования станет равной нулю. Движение рабочего органа продолжается в соответствии с достигнутым углом поворота лопастей, ошибка достигает нуля, а величина перерегулирования назначительна. Устройство может быть также,использовано идля управления положением рабоЧёго по направлению, например тхля управления по курсу автоматизированными машинами для бетонирования дорог, каналов и т.п. ; ЬбйЪдая более stacoKHSw хара ктерисгйкамйгто Ьчности, это устройство в то же время обеспечивает возможность повысить скорость рабочего процесса. Соответственно снижается себестоимостьработ, более эффективно используется парк машин, уменьшается потребность.в рабочей силе. Формула изобретения Устройство Для управления положением рабочего органа землеройных Машн, Включающее датчик положения рабочего органа, усилитель, электрогйдро90ло ник, гидроцилиндр управления и исполнительный механизм, соединенньЬ с рабочим органом, о т л ич а юте е с я тем, что, с целью повышения точности управления, устройство снабжено гидравлическим катарактом с электрогидрозолотником, датчиком положения штока катаракта и суммирующим эвеном, выход Kisfeicsorb через усилитель соединен с sjlefetpdгидрозолотником катаракта, а вход - с датчиком положения штока катаракта.
Источники ИНфОрМсЩИИ,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР 319251, кл. Е 02 F 5/10, 1970.
2.Патент ГДР 101933,
. 84 а 11/02, опублик. 1973 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Устройство для управления рабочим органом погрузочной машины с клиновым носком | 1981 |
|
SU1155690A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Система автоматической стабилизации поперечного наклона рабочего органа землеройной машины | 1980 |
|
SU899808A1 |
| Система автоматического управления землеройной машины | 1987 |
|
SU1509489A1 |
| Гидравлический привод ковша погрузчика | 1981 |
|
SU1006644A1 |
| Система автоматического управления рабочим процессом асфальтоукладчика | 1987 |
|
SU1491930A1 |
| Подвеска стрелы рабочего органа роторного экскаватора | 1988 |
|
SU1709022A1 |
| Устройство автоматического управления бестраншейного дреноукладчика | 1980 |
|
SU907177A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
