11
Изобретение относится к горнорудной промышленности, преимущественно к угольной, и можрт быть использовано при созлании автоматизации горных машин, в частности диагности- рования предельных искривлений конвейерного ставя струговой установки.
UeJib изобретения - упрощение диагностировании.
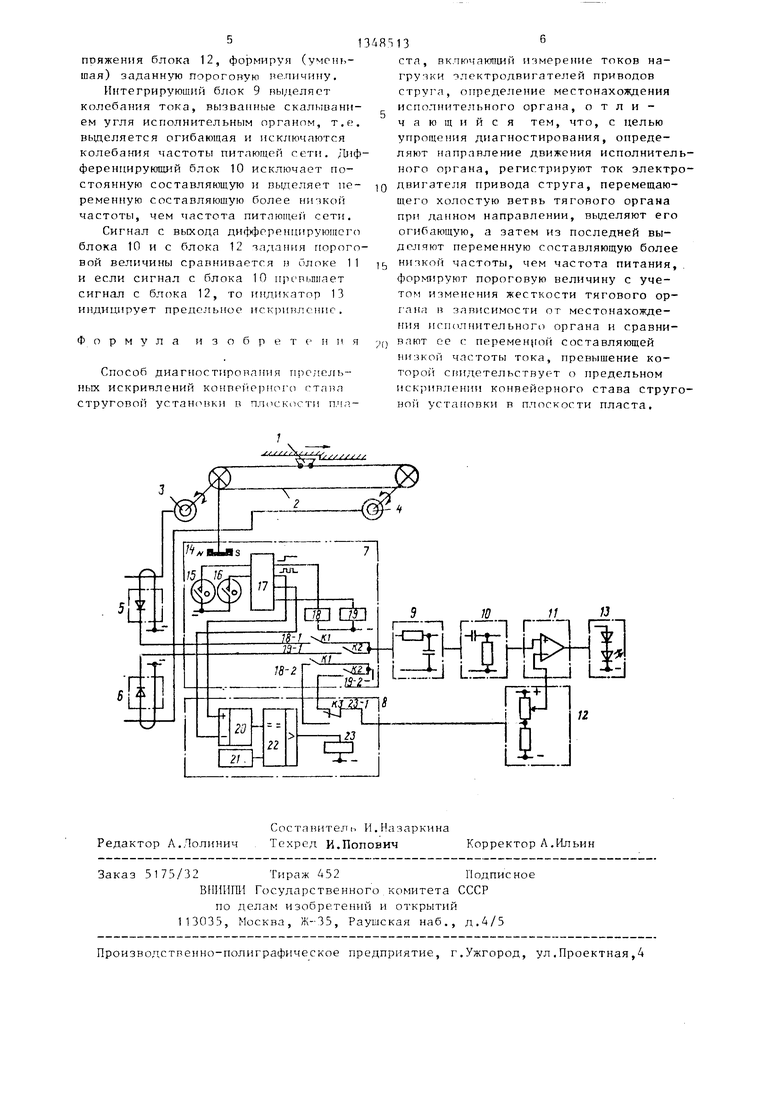
На чертеже представлена схема устройства .
Схема содержит исполнительный орган 1, который перемещается по напраляющей конвейерного става тяговым ор ганом 2, имеющим два периода с электродвигателями 3 и 4 датчики 5 и 6 тока, соединенные с блоком 7 определения направления движения исполнительного органа 1, соединенного с блоком 8 определения местонахождения исполнительного органа. Блок 7 определения направления движения исполнительного органа соединен через последовательно соединенные интегрирую щпй блок 9 и дифференцирующий блок 1 с первым входом блока 11 сравнения, второй вход которого соединен с блоком 12 задания пороговой величины, соединенного с блоком 8 определения местонахождения исполнительного органа, выход блока 11 сравнения подключен к индикатору 13.
В тех случаях, когда струги работают не по мягким сильно отжатым углям, а производят разрушение достаточно монолитного забоя угля резанием, нагрузки на исполнительном органе этих машин, определяемые сопро- тивлением горных пород резанию и си- лами трения, характеризуются резкими непериодическими изменениями.
Вследствие малой жесткости трансмиссии и пульсирующего характера сил внещнего сопротивления на исполни- тельном органе выемочных машин (чередование пиковых нагрузок разных величин) неравномерность движения системы привода будет существенной.
Упругость и инерционность системы вызывают появление автоколебательного процесса.
Струговые установки наряду с общими признаками автоколебательных систем обладают также некоторыми специфическими особенностями. Во-первых, автоколебания не являются строго периодическими, так как регулирующий элемент - пики сил внешнего сопро132
тивления - принимает в процессе работы различные случайные значения. Во- вторых, амплитуды и экстремальные скорости движения системы будут,как и периоды движения,неодинаковыми. Таким образом, автоколебательный процесс определяет нагрузку в системе этой машины и законы ее движения.
Если для упрощения принять, что движение струга происходит только вдоль лавы, а скорость движения привода постоянна и равна V, то для первого периода деформация составляющих схему элементов будет пропорциональна их податливости.
Отсюда скорость X и перемещение X струга в первом периоде будут определяться податливостью системы и забоя и скоростью движения привода
V
-L
с
(м/с).
X
V
(м).
где С - коэффициент жесткости системы, к Г / м; а; - коэффициент жесткости забоя
в этот момент, кГ/м. Усилия в системе в этом периоде будут изменяться согласно выражению
Q
35
F F,
+ С, V-t,
F. - некоторое усилие, сущест- вовавгкее в системе в начале первого периода, кГ; СI - результирующая податливость забоя и системы
Р Caj С + г
(кГ/м).
50
55
Усилия, возникающие в системе, распределяются между приводами струга: основным, перемещающ11м рабочую ветвь с исполнительным органом, и вспомогательным, перемещающим холостую ветвь тягового органа.
В установившемся режиме усилия, воспринимаемые основным приводом, превышают величину усилий на вспомогательном электроприводе. Это определяется различными значениями резуль- тируюшей податливости системы, где переменной величиной является коэффициент жесткости системы С.
3
Увеличение жесткости системы приводит к увеличению усилий на всиомо- г ательном электроприводе.
НаиГ50111,ший интерес представляет изменение жесткости системы вследс-t - вие появления искривления в плоскост пласта, как результата действия не- скольких факторов (различной толци- ны снимаемой стружки угля из-за раз- личной крепости последнего, отставания приводов, имеющего место по ор га низ а IJJ1 он но-техническим причинам, различного усилия прижима струга к забою по длине лавы и др.).
Можно сделать заключение, что имеющаяся зависимость, устанавливающая связь между моментом на выходном валу, а следовательно, и током нагрузки вспомогательного электропривода струговой установки и искривлением ее конвейерного става, может быть положена в основу оценки наличия предельного искривления конвейерного става.
Под предельным понимается искривление конвейерного става струговой установки со стрелой прогиба равной 1,5 м на 100 м длины става.
Измеряя токи нагрузки электродви- гателей струга, определяя направление, регистрируя ток электродвигателя привода струга, перемещающего холостую ветвь тягового органа при данном направлении, выделяя его огибаю- щую, а затем из нее выделяя переменную составляющую более низкой частоты, чем частота питания, определяя местонахождение исполнительного органа, формируя пороговую величину с учетом изменения жесткости тягового органа в зависимости от местонахождения исполнительного органа и сравнивая ее с переменной составляющей
низкой частоты тока и в случае превышения последней можно диагностироват предельное искривление конвейерного става струговой установки. Этот способ реализуется системой, представленной на чертеже.
После запуска приводов сигналы с датчиков 5 и 6, пропорциональные токам электродвигателей ЗиЛ приводов струговой установки, подаются на блок 7 определения направления движения, который содержит постоянный магнит 14, механически связанный с приводной звездочкой струга, пространственно распределенные два маг
5
0 5
О д
5
п
5
13нитоупрпвляемых Koiri-пк га 15 и 16 и лот ический блок 17. Наличие двух контактов (герконов) дает НОЧМОЖНОСТЕ, по очере/1ности их сраПатр шпния и отпускания имет1 информацию не только о пройденном стругом пути, но и направлентш перемещения.
При перемещении магнита последний поочередно воздействует на первый ио направлению перемещения контакт 15, который при достижении постоянным магнитом 14 определенного положения включается и остается в этом состоянии до тех пор, пока не сработает BTopoii контакт 16. После этог о сначала отключается первый контакт 15, а затем - второй контакт 16. При изменении направления движения исполнительно г о органа порядок включений (отключений) контактов изменяется на обратный. В зависимости от последовательности замыкания и размыкания контактов 15 и 16 (при дшсжении вперед первым зпм.1кается контакт 15, затем 16, разм1)7кается 15, затем 16; при движении назад перным зам1,1каст- ся 16 затем 15, рлзмтлкается 16, за- затем 15), блок 17 ныдпет на выходах сигнал направления движения (в первом случае срабатывает реле 18, во втором - реле 19) и импульсньи сиг- нал на блок 8 опрелеленля местонахождения исполнительного органа.
При движешш вперед (к приводу с электродвигателем 4) обратную (холостую) ветвь тягового органа перемещает привод с электродвигателем 3, поэтому сигнал к интегрирующему блоку 9 пропускается от датчика 5. При движении назад - к интегрирующему блоку 9 пропускается сигнал от датчика 6.
Блок 8 определения местонахождения исполнительного органа содержит реверсивньп1 счетчик 20, блок 21 задания точек по д:птне лавы (соответствующих чисел) и блока 22 сравнения, на выходе .которого срабатывает реле 23, если число в счетчике 20 больше заданного блоком 21.
С увеличением расстояния от исполнительного органа (струга) до привода, перемещающего обратную ветвь тягового органа, выходные контакты реле 18-2, 19-2 и 23-1, устройства контроля местонахождения струга шунтируют через определенные участк1; лавы один из резисторов делителя напряжения блока 12, формируя (умеш,- шая) заданную пороговую пе.пичину,
Интегриругоший блок 9 пыцеляст колебания тока, вызванные скалыиани- ем угля исполнительным органом, т.е. выделяется огибающая и иск:1ючаготся колебания частоты питающей сети. Лиф- ференпирунлций блок 10 исключает постоянную составляющую и выделяет пе- ремен ую составляюшую более низкой частоты, чем частота питпюще сети.
Сигнал с вькода дифференцирующего блока 10 и с блока 12 задания пороговой величины сравнивается в блоке 11 и если сигнал с блока 10 прс пьшгает сигнал с блока 12, то индикатор 13 индицирует предельное искривление.
Формула изобретения
Способ диагностирования предельных искривлений KOHBefiepHoro стпва струговой установки в плискости п.ча48S136
ста, включаюттшй измерение токов нагрузки тлектродвигателей приводов струга, определе)ие местонахождения исполнительного органа, отличающийся тем, что, с целью упрощения диагностирования, определяют направление движения исполнительного органа, регистрируют ток электро1Q двигателя привода струга, перемещающего холостую ветвь тягового органа при данном направлении, выделяют его огибающую, а затем из последней выделяют переменную составляющую более
15 низкой частоты, чем частота питания, формируют пороговую величину с учетом изменения жесткости тягового органа в зависимости от местонахождения исг1(шнительног1) органа и сравни;iQ вают се с перемен(гой составляющей низкой частоты тока, превышение которой свидетельствует о предельном иск1М1влении конвейерного става струговой установки в плоскости пласта.
7
wxxkxj- jf j
5 1 гЫч1
Lrr±Ll Lz±hJ Lh i Ljj
ю
1} ;j
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ремонта тяговой цепи стругового исполнительного органа | 1988 |
|
SU1620625A1 |
| Струговая установка | 1983 |
|
SU1137198A1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС С ДОБЫЧЕЙ ИСКОПАЕМОГО КРУПНЫМИ БЛОКАМИ И ДОСТАВКОЙ ЭСКАЛАТОРАМИ | 2008 |
|
RU2398107C2 |
| СПОСОБ ПРОФЕССОРА КАРИМАНА ПОДЗЕМНОЙ РАЗРАБОТКИ ПЛАСТОВЫХ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ВЫЕМКОЙ ИХ БЛОКАМИ И ТРАНСПОРТИРОВКОЙ ЭСКАЛАТОРАМИ | 2008 |
|
RU2383736C2 |
| СПОСОБ ПРОФЕССОРА КАРИМАНА ПОДЗЕМНОЙ РАЗРАБОТКИ ИСКОПАЕМЫХ КРУПНЫМИ БЛОКАМИ | 2011 |
|
RU2459078C1 |
| Углевыемочная машина | 1979 |
|
SU859631A1 |
| Струговая установка | 1984 |
|
SU1214921A1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС ПРОФЕССОРА КАРИМАНА ДЛЯ ДОБЫЧИ ИСКОПАЕМОГО КРУПНЫМИ БЛОКАМИ | 2011 |
|
RU2463450C1 |
| СТРУГОВЫЙ КОМПЛЕКС, СЕКЦИЯ КРЕПИ, УСТАНОВКА СТРУГОВАЯ, БАЗА СТРУГОВАЯ, ПРИВОД СТРУГА, ПЕРЕГРУЖАТЕЛЬ УКОРОЧЕННЫЙ, КРЕПЬ СОПРЯЖЕНИЯ, МАНИПУЛЯТОР ПЕРЕДВИЖНОЙ | 1999 |
|
RU2163970C1 |
| Струговая установка | 1977 |
|
SU734417A1 |
Изобретение относится к горнорудной пром-ти и м.б. использовано при создании автоматизации горных машин. Цель изобретения - упрощение диагностирования. Измеряют токи нагрузки электродвигателей приводов струга. Определяют местонахождение и направление движения исполнительного органа. Регистрируют ток электродвигателя привода струга, перемешаю- шего холостую ветвь тягового органа при данном направлении. Выделяют его огибаюшую. Затем за последней выделяют перемелную составляющую более низкой частоты, чем частота питания. Формируют пороговую величину с учетом изменения жесткости тягового органа в зависимости от местонахождения исполнительного органа. Сравнивают ее с переменной составляющей низкой частоты тока, превышение которой свидетельствует о предельном искривлении конвейерного става струговой установки в плоскости пласта. В тех случаях, когда струги работают не по мягким сильно отжатым углям, а производят разрушение монолитного забоя, нагрузки на исполнительном органе характеризуются резкими непериодическими изменениями. 1 ил. (Л со 4 00 ел
Составител ь И.Назаркина Редактор А.Лолинич Техред И.Попович Корректор А.Ильин
Заказ 5175/32 Тираж 452Подписное
ВНИППИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,А
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СЛ1Е1ЦЕНИЯ БАЗЫ ОЧИСТНОГО КОМПЛЕКСА | 0 |
|
SU350956A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| СИСТЕМА ВЫРАВНИВАНИЯ ИСКРИВЛЕННОЙ ЛИНИИ ЗАБОЯ СТРУГОВОЙ ЛАВЫ | 0 |
|
SU350948A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
