37301
колебаний динамической составпяющ-эй сил упругости.
ИЕЭТЬЮ настоящего изобретения является снижение динамической и ограничение ста тической составляющей сил упругости независимо друг от друга.
Это достигается тем, что измеряк-т скорость вращения ведомого вала привода и пропорционально ей задают скорость холостого кода двигателя, являюшугсюя ю параметром, влияющим на силу упрупх ти трансмиссии, с учетом коэффициента пропорциональности между скоростью вращения ведомого вала привода и скоросзпью холостого хода двигателя., 15
Кроме того, с целью компенсашш инерционности привода и системы управления им, корректируют задаваемую скорость холостого хода двигателя в зависимости от скорости вращения ведомого вала.20
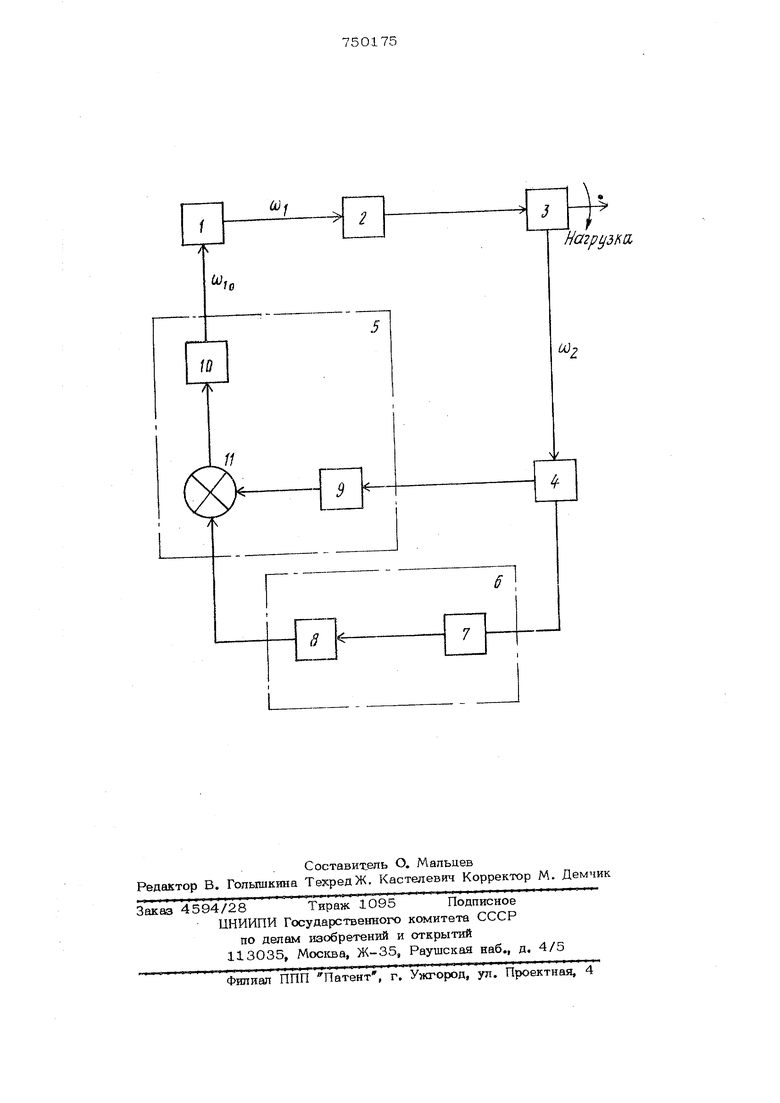
На чертеже дана структурная cx.eisfa пр1шода.
Двигатель 1, посредством трансмиссии. 2, связан с ведомым валом 3 привода, воспринимающим нагрузку, и снабжен двг- 25 чиком 4 угловой скорости, сигнал с кото рого подается на регулятор скорости вращения двигателя 5 и корректирующее устройство 6. Корректирующее устройство 6 может содержать дифференшгрующое 30 устройство 7 и усилитель 8, а регулятор скорости вращения двигателя 5 - усилитель 9, исполнительное устройство 1О и сумйирующее устройство 11, вход.которо го связан с выходами усилителей 8 и 9, 35 а выход - с исполнительным устройством 10.
При реализации предложенного способа измеряют скорость вращения ведомо:го вала 3 привода и пропоршюнально ей за- 40 дают скорость холостого хода двигатЕШЯ 1. При этом учитывают коэффициент пропорциональности между скоростью врЕщения ведомого вала 3 привода и скоростью хоsocToro хода двигателя 1, чем задают 45 величину статическ 3й составляющей сил упругости в трансмиссии 2, необходи1У ую Ш1Я преодоления статического момента нагрузки.
Лля компенсации инерционности приво - so да и системы управлений им в корректирующем устройстве 6 корректируют задаваемую скорость холостого хода. двига теля 1 в зависимости от скорости вращения ведомого вала 3.55
Действительно, если двигатель 1 имеет е абсолютно жесткую М9ханргческ5 ю ха54
рактеристику, то етю момент на валу можно представтъ как
(-,).(1)
где k - псх;тоянная велич1та
(jj - ф ш:т1иеска:я угловая скорость
двигателя 1: Ш - угловая скорость холостого хода двигателя 1. При реализации способа задают
(2;
KU7.,
UJ
ло
и.)„ угловая скорость вращения ведомого вала 3
К - коэффициент пропорциональности, которого определяется требуемым скольжением двигателя S , необходимым для соэдан;нг определенного статического момента на валу дрзигателя 6.
;з)
,-,
Тогда, принимая во в1П мание, что в статическом из оыражеиия (1) полу аем
ЬЛ-А(1 fj(4)
то есть статический момент на валу двигателя 1, и, следовательно, статическая составляющая сил упругости пропорциональны соотношению скоростей вращения ведач-гого вала 3 привода и скорости холостОго хода двигателя 1.
CimTea корректирующег-о устройства может быть приведен либо частотньпч1и методами по теории автоматического регулирования, либо на основе теории опт5 мального управления для любых систем автоматического управления любыми типами приводов.
Например, для частотноуправляемого асинхронного электропривода выражение для скорректированного сигнала выглядит следующ1п 1 образом
(7)
( (- р uj , где ускорение скорости вращения ведомого вала 3 привода - пос1Ч янная, зависящая от параметров электромеханической системы двигатель исполнительны механизм.
Тогда, реализация предлагаемого спо соба для гашения колебаний сил упругости в трансмиссии 2 при управлении двигателем 1 предполагает измерение скорости вращения ведомого вала 3 привода и пропорционально ей задают скорость холостого хода двигателя 1, являющуюся параме-РpOMf влияющим на силу упругости транс57501
миссии, с учетом коэффициента пропорциональности к между скоростью вращетгия ведомого вала 3 привода и скоростью холостого хода двигателя, при этом выходной сигнал усилителя 9 подают наj суммирующее устройство В корректирующем устройстве 6, посредством дифференщфования сигнала с датчика 4 скорости в дифференцирующем устройстве 7 и умножения на заданный коэффициент (В) io в усилителе 8, формир уется корректирующий сигнал, который поступает на суммирующее устройство 11.
Выходной сигнал суммирующего устройства 11 поступает на исполнительное 15 устройство 10 (при частотном управлении асинхронным двигателем - преобразователь частоты) регулятора скорости вращения двигателя 5, посредством чего задают скорость холостого кода двигате;1я UJ,Q , 20
При возрастании нагрузки на ведомый вал 3 привода, вызывающей, за счет деформации трансмиссии 2, уменьшение его скорости вращения, снижают скорость холостого двигателя 1, а при падении на 25 грузки, вызывающей, за счеГуманьшения деформации трансмиссии 2,ув еличение скорости вращения ведомого ала привода 3, увеличивают скорость холостого : хода двигателя 1.30
Таким образом, происходит задание скорости холостого кода двигателя 1 скоростью вращения ведомого вала 3 привода, Задание скорости холостого хода двигателя 1 скоростью вращения исполнительного органа приводит к слежению фактической скорости двигателя 1 за скоростью ведомого вала привода 3, что приводит к . снижению амплитуды динамической состав-40
756
лятошей сил упругости и срыву автоколебаний в системе пр1шода.
Формула из обретения
1.Способ гашения колебаний сил упругости в приводе, заключающийся в том, что изменяют параметр, влияк щий на силу упругости трансмиссии ведомого вала пр1шода в зависимости
от его скорости, о т л и ч а ющ и и с я тем, 4TOj с целью снижения динамической и ограничения статической составляющих сил упругости независимо друг от друга, измеряют скорость вращения ведомого вала привода и пропорШioнaльнo ей задают скорость холостого хода двигателя, являющуюся параметром, влияющим на сипу упругости трансмиссии с учетом коэффициента аропоршюнальности между скоростью вращения ведомого вала пр1гоода и скоростью .холостого хода дв1 гателя.
2.Способ гашения колебаний по п. 1, отлич ающийся тем, .что, с целью компенсации инерционности привода и системы управления им, ,коррект1фуют задаваемую скорость холостого хода дв1 гателя в зависимости от скорости вращ&ния ведомого вала.
Источники информации, принятые во внимание при экспертизе
1,Докукин А. В. и др. Методы и средства снижения динамических нагрузок . в приводах выемочных машин. Горные машины и автоматика, 1962, № 2, с. 110,
2.Авторское свгщетельстцо СССР № 168965, кл. F 01Т) 17/1О, 1965 (прототип).
UJ,
Ha2pydl L
z
3
