Изобретение относится к машиностроению и может быть использовано в механизмах для реверсирования движения.
Известен винтовой механизм, содержа1ций корпус, размещенные в нем два параллельных ходовых винта, кинематически связанных зубчатой передачей с возможностью противоположного вращейия, полугайку, взаимо действующую с винтами, и кулачки 1
Недостатке указанного механизма является пауза в передаче движения с винтов на ролик в момент реверсирования при малых оборотах винтов, так как профиль кулачков и их расположение увеличивают время перехода полугайки с одного винта на другой.
Целью изобретения является расширение технологических возможностей передачи в момент реверсирования при малых оборотах винтов.
Указанная цель достигается тем, что винтовой механизм, содержащий корпус,, размещенные в нем два параллельных ходовых винта, кинематически связанных зубчатой передачей с возможностью противоположного вращения, полугайку, взаимодействуювдую с винтами, и кулачки, снабжен двумя скоб€1ми, один конец каж;дой из которых расположен в каретке, а другой - в соответствующей полости полугайки, а каждый кула- чок выполнен в виде линейки, профиль которой образован прямым и наклонным участками, параллельными аналогичным участкам другой линейки и смещенными на длину прямого участка, и которая имеет паз с размещенной в нем пружиной, прижимающей скобу к профилю линейки.
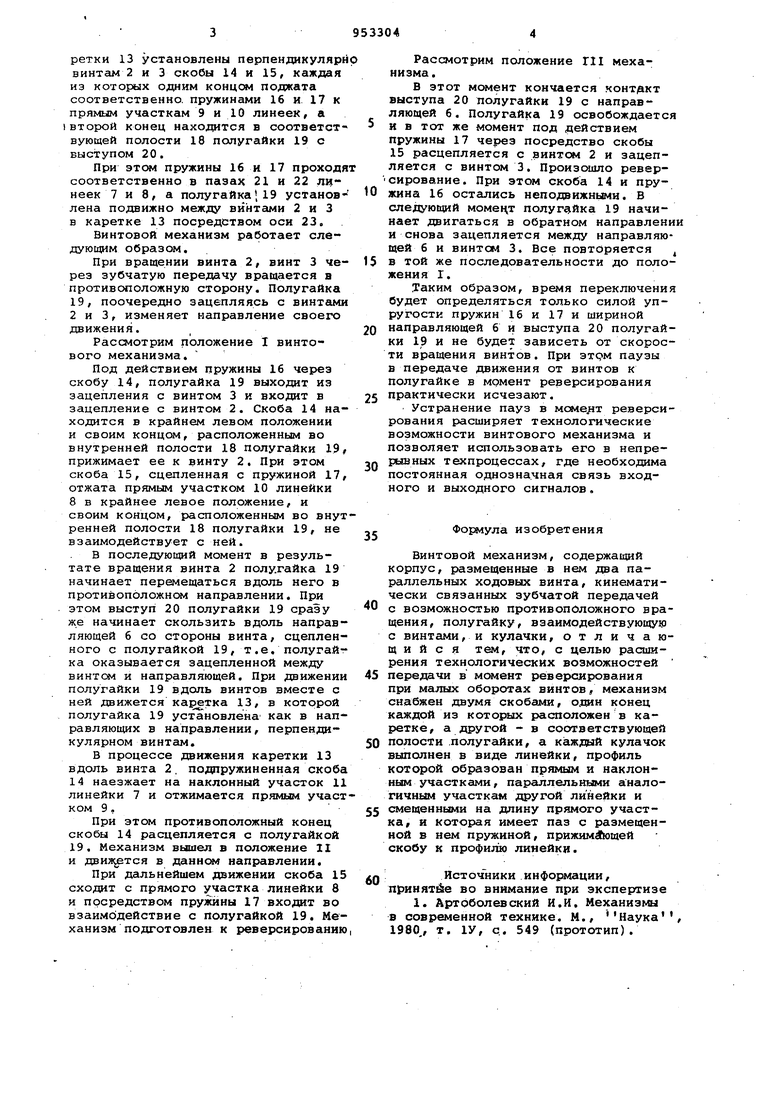
На фиг.1 изображен винтовой механизм, план (1, 111 - положения механизма после переключения, 1.1 положение механизма в процессе установившегося движения) ; на фиг.2 разрез А-А на фиг.1.
Винтовой механизм содержит корпус 1 с расположенными в нем параллельными ходовыми винтами 2 и 3, связанными зубчатой передачей, выполненной в виде зубчатых колес 4 и 5. В корпусе 1 закреплены направляющая 6 и линейки 7 и 8, профили которых образованы прямыми участками 9 и 10 и наклонными участками 11 и 12. Линейки 7 и 8 служат одновременно направляющими дпя каретки 13. В пазах каретки 13 установлены перпендикулярно винтам 2 и 3 скобы 14 и 15, каждая из которых одним концом поджата соответственно, пружинами 16 и 17 к прямым участкам 9 и 10 линеек, а второй конец находится в соответствующей полости 18 полугайки 19 с выступом 20.
При этом пружины 16 и 17 проходят соответственно в пазах 21 и 22 лн неек 7 и 8, а полугайка,19 установлена подвижно между винтами 2 и 3 в каретке 13 посредством оси 23,
Винтовой механизм работает следующим образом.
При вращении винта 2, винт 3 через зубчатую передачу вращается в ротивоположную сторону. Полугайка 19, поочередно зацепляясь с винтами 2 и 3, изменяет направление своего движения.
Рассмотрим положение I винтового механизма.
Под действием пружины 16 через скобу 14, полугайка 19 выходит из зацепления с винтом 3 и входит в зацепление с винтом 2. Скоба 14 наодится в крайнем левом положении своим концом, расположенным во внутренней полости 18 полугайки 19, прижимает ее к винту 2. При этом скоба 15, сцепленная с пружиной 17, отжата прямым участком 10 линейки 8 в крайнее левое положение, и своим концом, расположенным во внутренней полости 18 полугайки 19, не взаимодействует с ней.
В последующий момент в результате вращения винта 2 полу.гайка 19 начинает перемещаться вдоль него в ротивоположном направлении. При этом выступ 20 полугайки 19 сразу е начинает скользить вдоль направяющей 6 со стороны винта, сцепленного с полугайкой 19, т.е. полугайка оказывается зацепленной между винтсм и направляющей. При движении полугайки 19 вдоль винтов вместе с ней движется 13, в которой полугайка 19 установлена как в нап равляющих в направлении, перпендикулярном винтам.
В процессе движения каретки 13 вдоль винта 2. подпружиненная скоба 14 наезжает на наклонный участок 11 линейки 7 и отжимается прямым участком 9 ,
При этом противоположный конец скобы 14 расцепляется с полугайкой 19. Механизм вышел в положение II и в данном направлении.
При дальнейшем движении скоба 15 сходит с прямого участка линейки 8 и посредством пружины 17 входит во взаимодействие с полугайкой 19. Механизм подготовлен к реверсированию.
Рассмотрим положение Г11 механизма.
В этот моме.ит кончается контдкт выступа 20 полугайки 19 с направляющей 6. Полугайка 19 освобождается
и в тот же момент под действием пружины 17 через посредство скобы 15 расцепляется с винтом 2 и зацепляется с винтом 3. Произсшло реверсирование. При этом скоба 14 и пружина 16 остались неподвижнь01и. В следующий момецт полугайка 19 начинает двигаться в обратном направлении и снова зацепляется между направляющей 6 и винтом 3. Все повторяется
в той же последовательности до положения I.
Таким образом, время переключения будет определяться только силой упругости пружин 16 и 17 и шириной
направляющей 6 и выступа 20 полугайки 19 и не будет зависеть от скорости вращения винтов. При этрм паузы в передаче движения от винтов к полугайке в мрмент реверсирования
практически исчезают.
Устранение пауз в MOMejiT реверсирования расширяет технологические возможности винтового механизма и позволяет использовать его в непрерывных техпроцессах, где необходима постоянная однозначная связь входного и выходного сигналов.
Формула изобретения
Винтовой механизм, содержащий корпус, размещенные в нем два параллельных ходовых винта, кинематически связанных зубчатой передачей
с возможностью противоположного вращения, полугайку, взаимодействующую с винтами, и кулачки, отличающийся тем, что, с целью расширения технологических возможностей
ередачи в мсжент реверсирования при малых оборотах винтов, механизм снабжен двумя скобами, один конец каждой из которых расположен в каретке, а другой - в соответствующей
полости полугайки, а каждый кулачок вшюлнен в виде линейки, профиль которой образован прямым и наклонным участками, параллельными аналогичным участкам другой линейки и
смещенными на длину прямого участка, и которая имеет паз с размещенной в нем пружиной, прижим щей скобу к профилю линейки.
Источ ники информации,
принятие во внимание при экспертизе
1. Артоболевский И.И. Механизмы в современной технике. М., Наука 1980, т. 1У, с. 549 (прототип).
1
4
Фиг.1