Обычно л.1я П()1руз 1ч г/;я ij liopo;ил ;:рмме: я:сгг рязиьк .
l- :iK{-cr;, г:( псп(}.1 :ЗО1М1 п:я д.1я )rp 3Ki: пг)ро;:,1 } г.юпогрузоч 1Ь;; МИШИН, н;;пр: ор, р:;б() ()p:;:i ;;M и lu:; лпух распо 1О кеи:1ЫХ ::а iiaKToiiJif;; раме л;и, гкХП ЧгКЯн.их ;i,:i:f Keifne от криношнппых ()-5 и HiM pepbiniii) 3;i; pniiiiia:o;i iiv м (,()1пмх yroii, па п})И(:Мпы: KOi/iseikp, с KOTOjX) oii зателг nciH-;iaerc i на поре рузочи.Н1 комиеПе;) );чмер, типа (%1оЗ).(;и;ак() к таких Aiaiuniax без узелнicHHsf габаритов рабочего) органа кмьзя ПОЛУЧИТЬ на, KOiHc загребгиоinc;: .laHbi в MfjNicuT ее 1;нел|) i
|Г(;1);) У;-;,. Н{Ч)бхО Л; л: i ,е Л Л: ра6(ii,i MaiiiHiibi на i()rpy3i e .
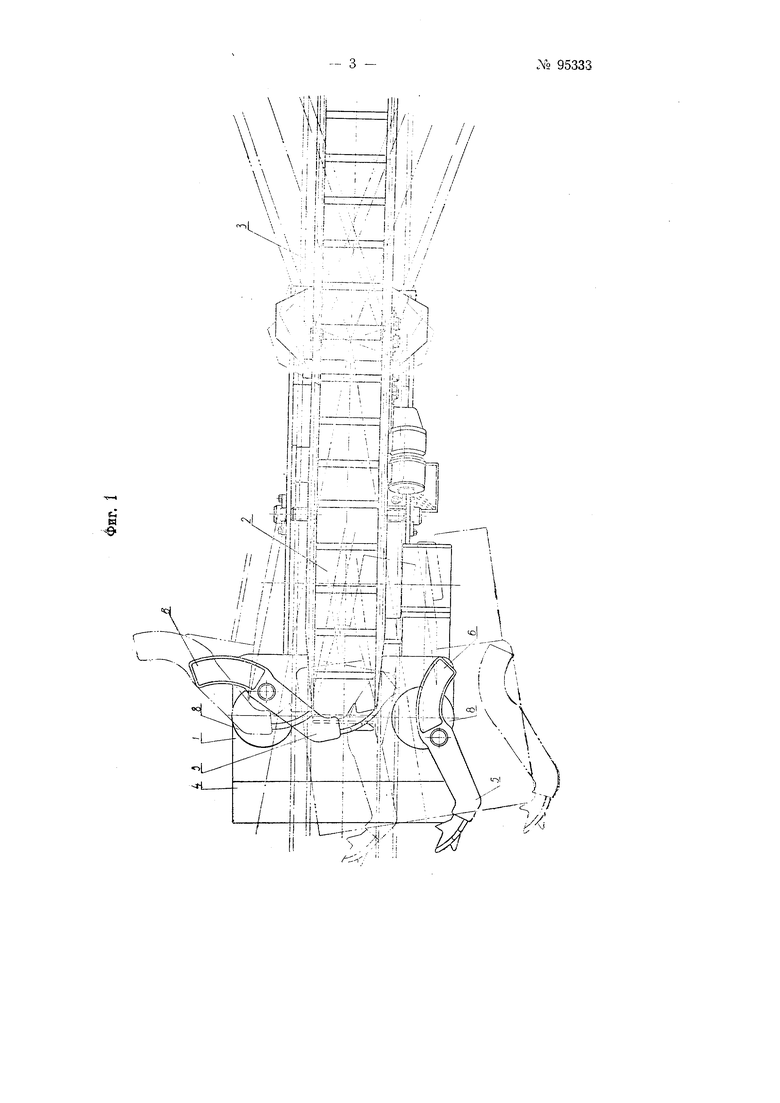
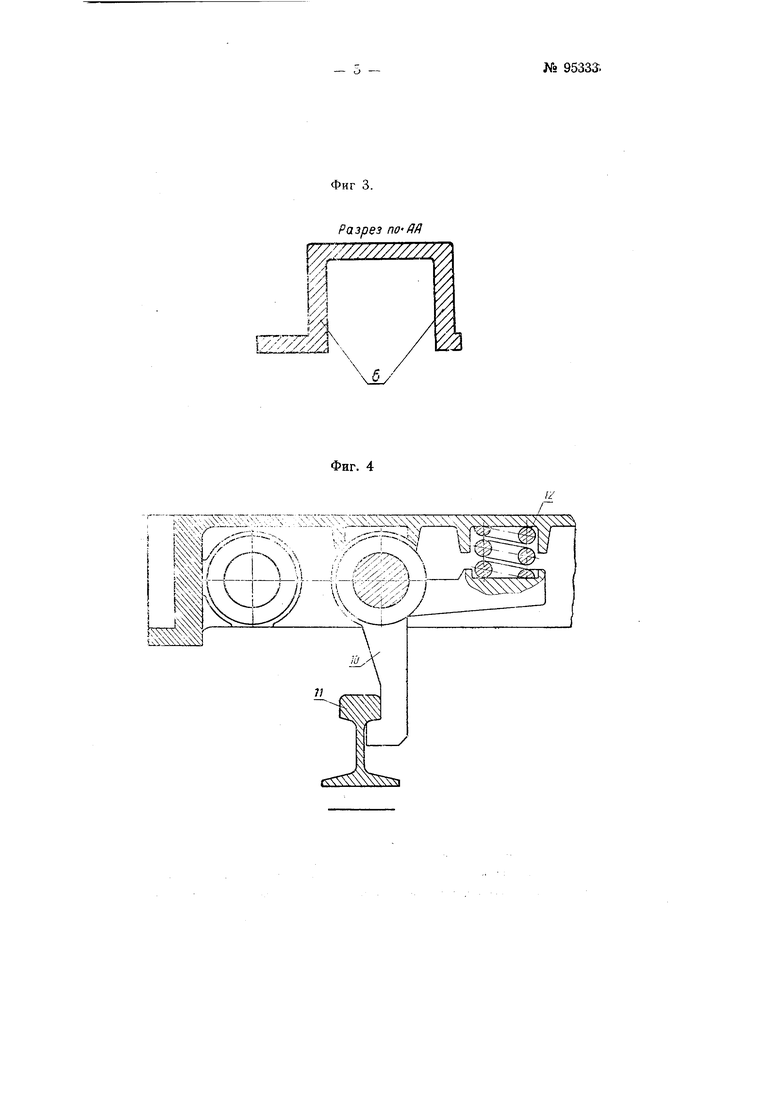
f oHHCbHsacMOH машине л.чя поi)y:iKii уг.1я и поролы в горнзоитальнглх . нак.)1х в,1работ-ках, HMcvoiHr-ii рабо(пГ| орган ; пиле раеьч),7Г)же1Н1ых па наклонно )aiMe .таг;. но/ ча1О цнх лвиженнс- от крн1;о ; ип1Н)1х механизмов, необхолнмос уси.Ше на конце загребаюшеГ .ланы п .vroMOiiT ее внелрения в поролу достигастся тем, что ка/клая лапа снаб:-1 ена пазом, спу/каншм лля 1-,занмоле1 1Ствня е ненолви/кным на.гьн,ем, летанов.тенным на наклон)ioii ралге. Благоларя этому созлаMaiHiii a. iii,; ег ер-х.Л ла ir бочмн opiai; :-;aHJiun-i, внд и CROp:: : ;ia Coia. -разрез но .1.1 на ipi-ir. 2; i:a (. 4 - нопереч ;;,:; разО;::е: ;;:;- КЯ ;:0|-|1 -зоч ая лан1Нiia ;;)ел.гав.1яет .,-обоп lUjieNieiHaioHUioci: ре-л,еа . м;- которой л:о1;т1 рованы: ;)абоч;;; oiraH /, ,.кр( -;. конлеЛе; 2 и персгп зоч;н тП е -:| -б|чОВЬ Л ко иенеп .
РабочнП (ioraH / ;; :ее: :;ai-:;io г 0 -ViMx -/. ) .:п;ЧПоП iepe iei;iai4Ti- i лве ...а;, . Кал-:,;ая лапа J еяабже1Га ..ooTii,:-iTR ao iern
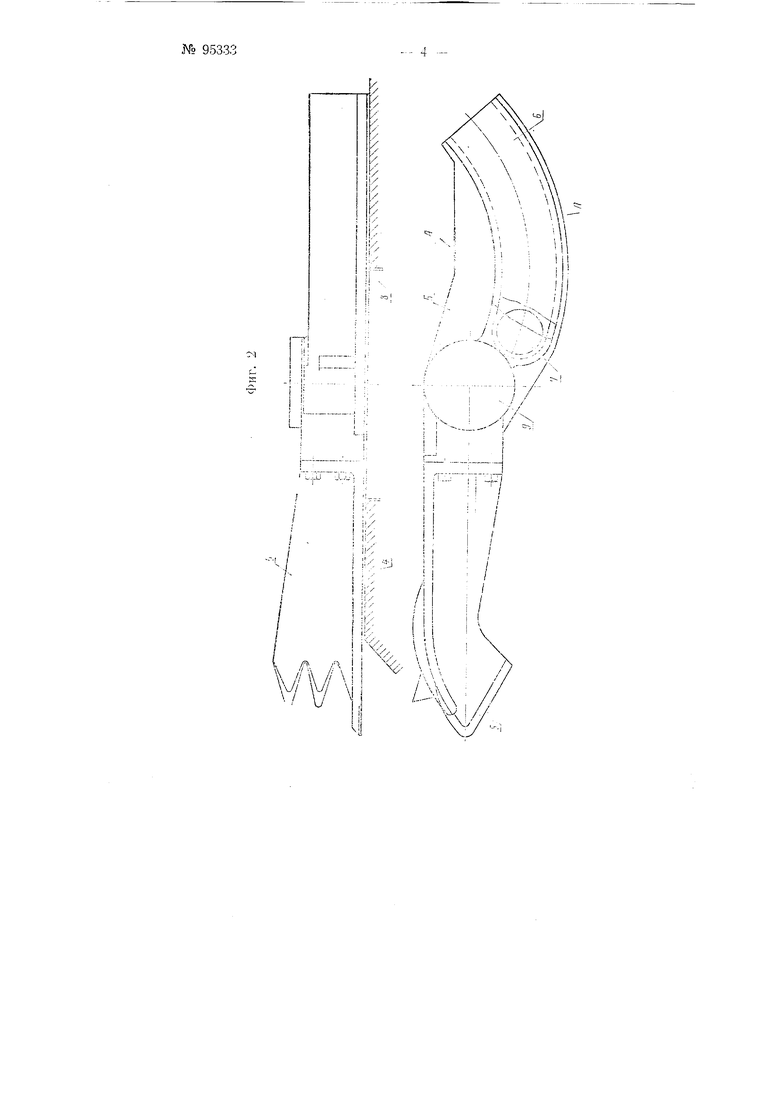
iIpO(., и l(Or; nbili ПХО1ЛТ НеГК лвкжнм) палец /. етанов1е ПЦ::н в . В| Ж -{О1: .онло : лпнпцны. Ланы 5 по..)т лвн/кенне от кривонн-шов. При нраи1ен;н; лрмвопппнюго л:ска - naccTosnHie от точки зпкренлекия 9 .лап1.1 5 па кппвогиипе ло гтепояп1 лнон огторм пальна 7 ненрерыв1 о меняется, т. е. но,лучается рычаг е переменным н.зечом, совершаюиин лвиженкя, обеепечивающие получение па конце .лапы 5 заланных и нeoб.xoлii гыx л.1Я практическоГ| работы ruj гюроде законов движения, скоростс 1 ускорений. В частности, достигается получение минимальной скорости конца лапы при внедрении и забирании породы II максимальной-ири xo.-iociOM ходе лапы. Переменное плечо лапы, увеличиваюпхееся к моменту внедрения лапы в породу и зачериьншния породы, позволяет при тех же параметрах механизма значительно 5елиЧ1гть усилие иа конце загребгиощеи лапы 5, но сравнению с сн;п-;ем иа .тапе нзвестпых .мангим (иаиример. С-153). Этим обеспечив;;ется г-озможность иримеиеиия оппсываемоГ; погрузочной мапп- пы на погру ке породы.
Достоинством рабочего ор -г1иа маПП1НЫ, лапа которого нглпо.шсиа и виде рычага с nepeMeniHiiM во время работы плечом, является также г озможность при необходимо ширине описываемой концом лапы 1сривой получить удлииеине ее рабочей части. Этнм обеспечивается возможность, помимо правильного зачерпываиия породы, производить ее доставку на длину, устанавливаемую условиями работы в наклонных выработках, где необходимо не просто бросить материал на наклонную раму, но и доставить его, во избежапие скатывания к забою, пепосредственно до конвейера маширгы.
Вследствие отсутствия уступов нл раме 4 лапы 5 движутся по ней без зазоров, в которые мог бы попасть погружаемый материал, чем предотвращается заклинивание твердых пород в механизме рабочего органа.
Рабочий орган /, т. е. нак.тонная рама 4 вместе с лапами 5, может быть при ПОМ01ЦИ гидравлических
устройс1в повернут (показано пунктиром на фиг. ) в обе CTOpoiHJ (например, по 10-25° на сторону). Таким же образом может быть повернут перегрузочный конвейер 3 (показа ю иунктиром на фи|-. 1). Возможность нор.орота в обе стороны :5абочего opian / и KOHBeiiepa позволяет производит погрузку yi, ;1.1И
пород1)1 в 5агоиетки ;Ho6oii . а также на доставочный ipaucnop ер в oaiionyjeBbix д ПХ 1уто; ых выработках.
Т) к отде.)х с.лучаях при работе загребаюнщх .;ап -5 срав 1 -1тельно бо.чЫ)П1е боковь е уси,:ия, 11ызь ва -; П1ие поперепп -е переЛ1е цеиия машинь;. оспр1-; имаются угловыми If) (фиг. 4), которые взаимодействуя с рельсом // (ранее чем реборда, колеса), с помопп ю 1ружи П11 12 застав.ляют вернуться в исходное по.ложение I тем самь.м предохра 1яют ее от спо.тзання с |)ельсов.
Пред м е т и з о б р
i 1 я
Магпи а д.мя погрузки угля и норОхТ.ы в горизонтадгьных и наклонных выработках с использованием рабочего органа в виде двух расноложепных на пакло1пюй раме лап, получ.аюдих движение от кривогпипньгх меха тизмов. и приемного и перегрузочного конвейеров, отличаю а я с я тем, что каждая лапа снабжена пазом для взаимодействия с пепо.а,вижным пальцем, установ.гтепным в наклонной раме, с пелып получепия во время работы пере.менного плеча лапы, увеличивающегося в момент внедрения последней в уголь или породу.
f-,
BtlU-lCliii // ;/ .
.Л
Фиг 3.
Разрез поДД
///////////////
г.
г
-чбу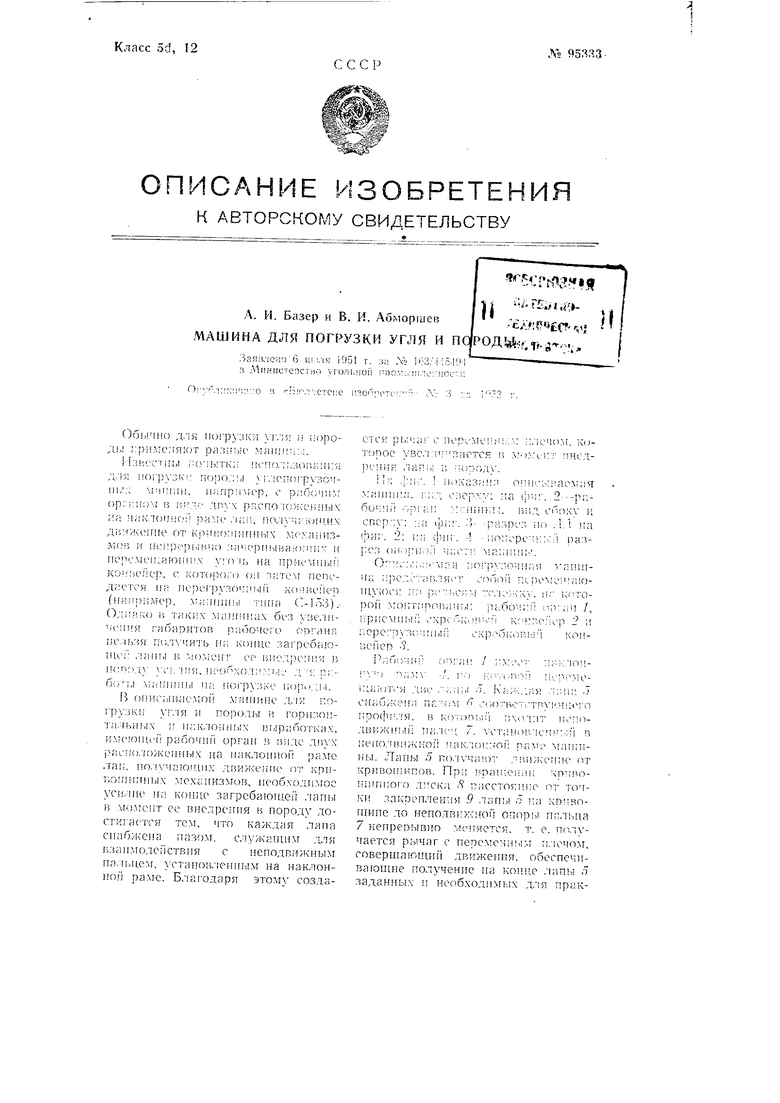

| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочный орган горной машины | 1977 |
|
SU748015A1 |
| Террасер | 1967 |
|
SU295294A1 |
| Культиватор | 1950 |
|
SU86636A1 |
| ПОГРУЗОЧНАЯ МАШИНА НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1967 |
|
SU196020A1 |
| Сортировочно-пакетирующая линия длинномерных изделий | 1986 |
|
SU1493325A1 |
| Вертикальная машина для проходки шурфов | 1951 |
|
SU94633A1 |
| Погрузочный орган горной машины | 1983 |
|
SU1145161A1 |
| Исполнительный орган фронтального агрегата | 1988 |
|
SU1528906A1 |
| Электрическая модель плоского механизма с низшими вращательными парами | 1953 |
|
SU103054A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 2014 |
|
RU2560013C1 |