k ОПРОКИДЫВАТЕЛЬ ШАХТНЫХ ВАГОНЕТОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Опрокидыватель шахтных вагонеток | 1980 |
|
SU893773A1 |
| Канатный толкатель для вагонеток | 1980 |
|
SU1020288A1 |
| Опрокибыватель | 1975 |
|
SU611840A1 |
| ШАХТНЫЙ ЕМКОСТНЫЙ КОНВЕЙЕР | 1995 |
|
RU2102603C1 |
| УСТРОЙСТВО ДЛЯ НАКАТЫВАНИЯ ВАГОНЕТОК | 1972 |
|
SU351778A1 |
| КОНВЕЙЕР ВЕРТИКАЛЬНЫХ СТВОЛОВ ШАХТ | 2003 |
|
RU2266249C2 |
| УСТАНОВКА ДЛЯ РАЗГРУЗКИ НЕРАСЦЕПЛЕННЫХ СОСТАВОВ | 1966 |
|
SU180130A1 |
| Орокидыватель шахтных вагонеток | 1974 |
|
SU563507A1 |
| Опрокидыватель шахтных вагонеток | 1984 |
|
SU1175834A1 |
| Боковой опрокидыватель для шахтных вагонеток | 1947 |
|
SU79994A1 |
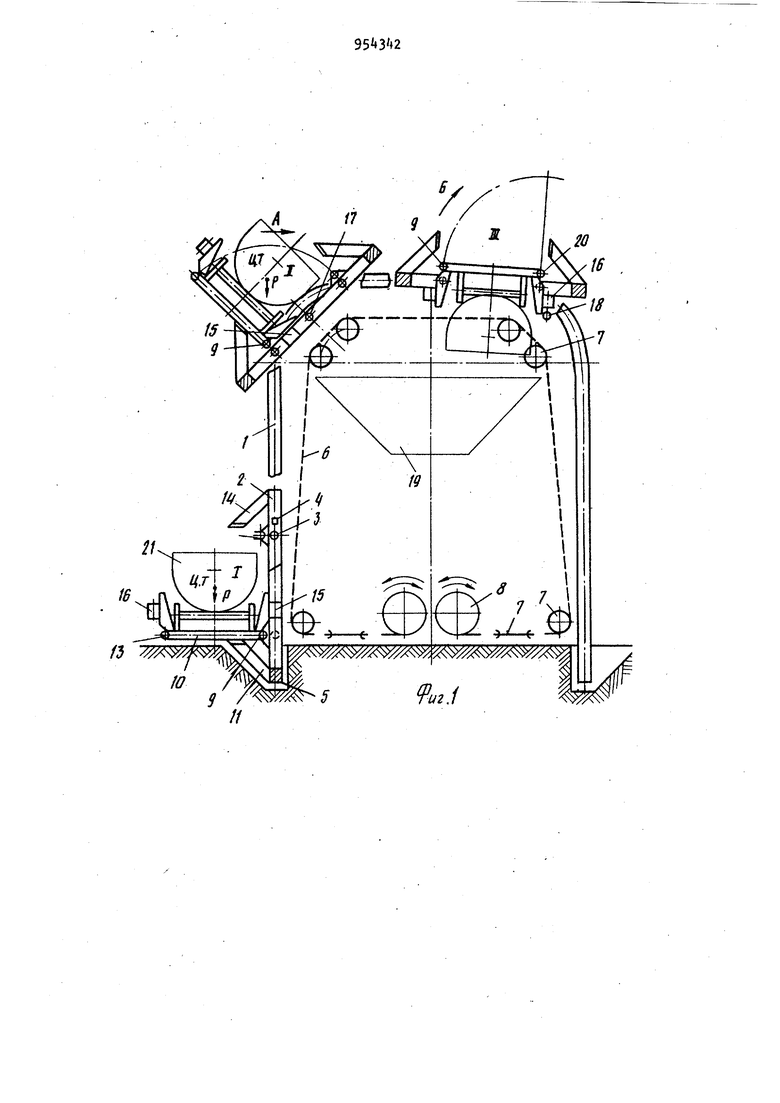
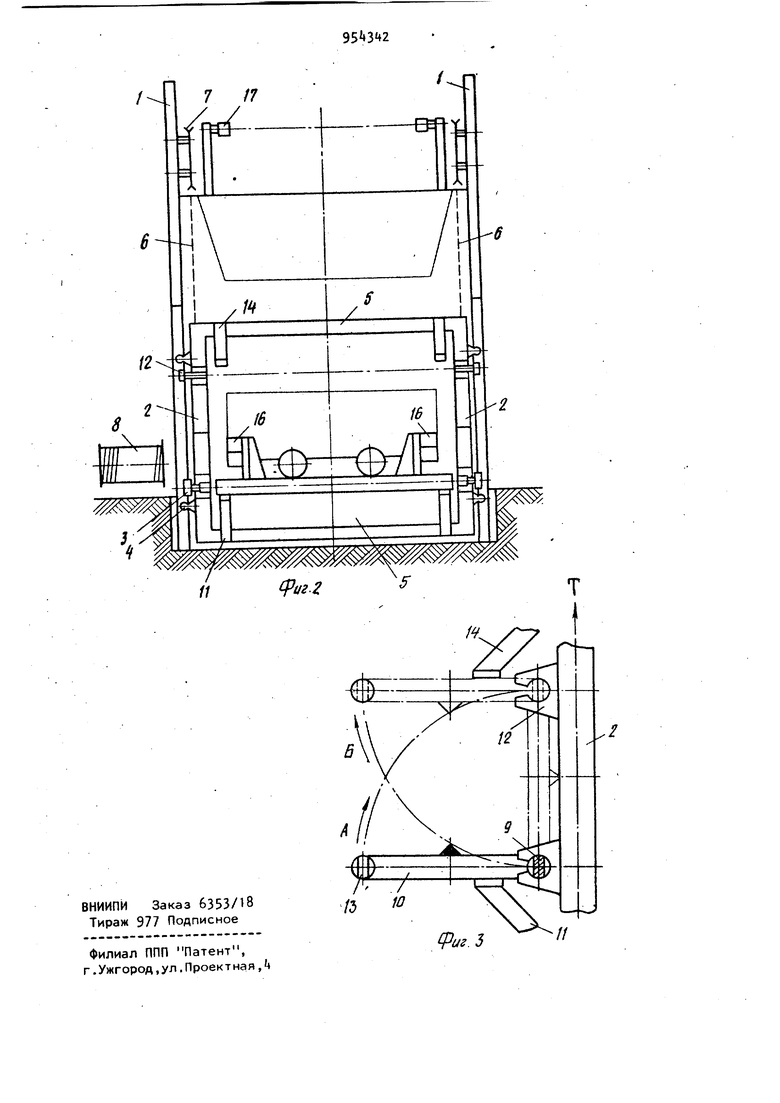
Изобретение относится к устройствам для разгрузки транспортируемой в вагонетках породы на поверхности шахт угольной и горнорудной промышленности Известен опрокидыватель шахтных вагонеток, содержащий криволинейные, направляющие, соединенные гибким тяговым органом, каретки с катками, установленными в упомянутых направляющих, платформу для вагонеток, шарнирно закрепленную на каретках l . Недостатками известного опрокидывателя являются сложность системы кри волинейных направляющих на несущей конструкции и увеличенный монтажный габарит его по высоте, обусловленный нерациональной, траекторией вращательного движения платформы над бункером, что, в свою очередь, вызвано отделенным расположением оси вращения платфо мы от направляющих. Кроме того, связь между разнесенными на длину вагонетки каретками посредством только их шармирных соединений с платформой не обеспечивает плавности хода кареток по направляющим при возникновении под действием случайных неравномерностей внешних сил и сил сопротивления движению кареток, так как наличие технологических зазоров в шарнирных соединениях не препятствует возникновению переносов подвижной системы, которые увеличивают, в свою очередь, неравномерность сил сопротивления и защемляют шарнирные соединения, что приводит в конечном счете к росту динамических усилий и рывкам подвижной системы. Цель изобретения - повышение надежности работы опрокидывателя. Поставленная цель достигается тем, что платформа снабжена прямоугольными направляющими, вертикально расположенными на ее боковых сторонах, и отклоняющими роликами, закрепленными на криволинейных направляющих и взаимодействующими с прямоугольны(и1 направляющими. С целью уменьшения его габарита по высоте путем обеспечения рациональной траектории движения платформы над бункером он может быть снабжен дополнительными разъемными шарнирами , ответные элементы которых размещены со ответственно на каретках и платформе. Для повышения плавности хода платформы по направляющим каретки могут быть соединены поперечными балками, образующими совместно D-образную раму размеры которой больше размеров платформы с вагонеткой. На фиг. 1 изображен предлагаемый опрокидыватель в плоскости, параллель ной траектории движения.кареток с платформой; нафиг. 2 - то же, со стороны платформы в исходном положени вид сбоку; на фиг. 3 два фиксирован ных положения платформы, которые она принимает относительно кареток в тече ние цикла работы опрокидывателя. Опрокидыватель состоит из двух вер тикальных параллельно установленных н расстоянии, большем длины вагонетки, несущих конструкцию арочной формы направляющих 1 ,между которыми располагаются две каретки. 2, снабженные катками 3 и 4 со взаимно перпендикулярными осями для удержания кареток 2 в направляющих 1. Каретки 2 жестко связаны между собой .поперечными балками 5 и образуют вместе с ними D-образную раму с окно К кареткам 2 в их средних точках прикреплены соответственно две замкнутые петли гибких тяговых органов 6 образующих с помощью системы блоков исходную форму петель, близкую к тра ектории движения точек закрепления :их на каретках 2. Привор, тяговых органов 6 осуществляется лебедкой 8. С каретками 2 при помощи двух соосных шарниров 9 связана платформа- ТО, в исходном положении(фиг. 1, положение l) опирающаяся на консольные выступы 11 кареток 2, Каретки 2 и платформа 10 дополни тельно снабжены симметрично расположенными элементами 12 и 13 кинематических пар шарнирного разъемного соединения, идентичными элементам шарниров 9. Каретки 2 содержат также си метрично расположенные консольные вы ступы. Н, идентичные выступам 11. На платформе 10 жестко закреплены с обеих сторон прямоугольные направляющие 15 и 16, а на несущей конструк ции направляющих 1 - ролики 17 и 18 по обеим сторонам бункера 19, которые в парах с направляющими 15 и 1б могут образовывать кулисные механизмы с центром вращения направляющих соответственно в шарнирах 9 или 20. Опрокидыватель работает следующим образом. В исходном положении (фиг. 1, положение I) на платформу 10 устанавливается и закрепляется груженая вагонетка 2J. Включается лебедка 8 и под действием тягового усилия Т каретки с платформой начинают подъем по прямолинейному участку направляющих 1. При входе кареток 2 в криволинейный участок направляющих 1 и по мере наклона кареток 2 линия действия силы тяжести Р платформы 10 с грузом приближается к центру шарнира 9 и в положении 11 подвижной системы наступает момент неустойчивого равновесия платформы 10. В этом положении или несколько ранее его направляющая 15 в своем движении с платформой 10 достигает ролика 17 и касается его, образуя в паре с ним кулисный механизм с центром вращения в шарнире 9. При дальнейшем движении кареток 2 с платформой 10 вправо по фиг. 1 от положения II платформа 10 при участии образованного кулисного механизма совершает дополнительное движение - вращение по часовой стрелке А относительно кареток 2 с цейтром вращения в шарнире 9. Эта фаза движения заключается с выходом кареток 2 на горизонтальный участок направляющих 1 над бункером 19. При этом платформа 10 с вагонеткой 21 оказывается в перевернутом на 180 положении относительно исходного. Груз из вагонеток 21 высыпается в бункер 19. Это положение на фиг. 1 не показано, но оно симметрично изображенному положению III относительно вертикальной оси симметрии арки направляющих 1. В указанных симметричных положениях и в промежутке между ними платформа 10 опирается на ка ретки через оба сомкнутых шарнира 9 и 20. Далее в зависимости от направления тягового усилия Т совершается третья фаза движения системы - возврат платформы в исходное положение относительно кареток (положение 11, а затем 1 при реверсировании привода тяговых органов) или при сохранении третьего направления движения - переход подвижной системы последовательно в положения, сим матричные изображенным положениям II и t относительно вертикальной оси сим метрии (фиг. 1). Как это видно из фиг. 1-3, конструкция и кинематика оп рокидывателя полностью симметричны от носительно направления движения, а пр должение вращения платформы 10 из положения III при сохранении направлени движения кареток 2 осуществляется теперь вокруг центра шарнира 20 по направлению, обозначенному стрелками Б на фиг. 1 и 3. За счет упрощения несущей конструк ции опрокидывателя повышается надежность его работы и уменьшаются габариты его по высоте, а за счет уменьшения динамических усилий в гибких тяговых органах снижается энергоемкость привода. Ожидаемый экономический эффект составит 30-50 тыс. руб. в год на один опрокидыватель. Формула изобретения 1. Опрокидыватель шахтных вагонеток, содержащий криволинейные направляющие, соединенные гибким тяговым ор ганом, каретки с катками, установлен ными в упомянутых направляющих, платформу для вагонеток, шарнирно закрепленную на каретках, отличающийся тем, .что, с целью повышения надежности работы, платформа снаб ена прямоугольными направляющими, вертикально расположенными на ее боковых сторонах, и отклоняющими роликами, закрепленными на криволинейных направляющих и взаимодействующими с прямоугольными направляющими. 2. Опрокидыватель по п. 1, о т личающийся тем, что, с целью уменьшения его габарита по высоте путем обеспечения рациональной траектории движения платформы над бункером, он снабжен дополнительными разъемными шарнирами, ответные элементы которых размещены соответственно на каретках и на платформе. 3. Опрокидыватель по пп. 1 и 2, отличающийся тем, что, с целью повышения плавности хода платформы по направляющим, каретки соединены поперечными балками, образующими совместно D -образную раму , размеры которой больше размеров платформы с вагонеткой. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке К 2913262/11, кл. В 65 G 67/38, I6.0i.80.
