(54) ГИДРОСИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ШПАЛОПОДБИВОЧНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема управления шпалоподбивочным рабочим органом | 1984 |
|
SU1204657A1 |
| ГИДРОСИСТЕМА ПОДБИВОЧНОГО БЛОКА ШПАЛОПОДБИВОЧНОЙ МАШИНЫ | 1991 |
|
RU2023784C1 |
| Гидросистема подбивочного блока шпалоподбивочной машины | 1986 |
|
SU1359390A1 |
| Гидросистема подбивочного блока шпалоподбивочной машины | 1990 |
|
SU1735471A1 |
| ШПАЛОПОДБИВОЧНЫЙ АГРЕГАТ | 2001 |
|
RU2194109C1 |
| ГИДРОСИСТЕМА ПОДБИВОЧНОГО БЛОКА ШПАЛОПОДБИВОЧНОЙ МАШИНЫ | 1990 |
|
RU2011726C1 |
| Гидросистема подбивочных блоков шпалоподбивочной машины | 1985 |
|
SU1303645A1 |
| Гидросистема подбивочного блока шпалоподбивочной машины | 1978 |
|
SU751877A1 |
| ГИДРОСИСТЕМА УПРАВЛЕНИЯ ШПАЛОПОДБИВОЧНЫМ РАБОЧИМ ОРГАНОМ | 1996 |
|
RU2088719C1 |
| Шпалоподбивочный агрегат | 1989 |
|
SU1703762A1 |

1
Изобретение относится к устройствам для строительства -и ремонта железнодорожного пути, в частности к гидросистемам управления подъемом и опусканием рабочего органа шпалоподбивочной машины.
Известна гидросистема управления рабочим органом шпалоподбивочной машины, содержащая силовой цилиндр подъема и опускания рабочего органа, связанный трубопроводами через гидрораспределитель с насосом 1.
Гидросистема не обеспечивает остановку рабочего органа в промежуточных положениях, что приводит к лишним затратам времени в цикле и снижает производительность шпалоподбивочной Машины.
Известна также гидросистема управления рабочим органом шпалоподбивочной машины, содержащая силовой цилиндр подъема и опускания рабочего органа двустороннего действия-, гидрораспределитель, емкость для рабочего тела и насос, причем полости указа1шого цилиндра соединены с насосом через гидрораспределитель (21.
Однако при ограниченной подаче насоса увеличение скорости опускания рабочего органа невозможно, так как скорость оиускашш 0
V
5,
где О - подача насоса;
S площадь гидроциландра.
Для увеличения скорости опускания необходимо увеличешю подата нгсоса и, следовательно, его мощности. Данное, устройство поз10воляет опускать рабочий орган с постоянной скоростью в воздухе и при внедрении в балласт.
Цель изобретения - расширите функциональных возможностей путем увеличения д{1алазона режимов работы силового цилиндра.
15
Для I достижения дели гидросистема снабжена реле давления, связанным с бесштоковой полостью силового цилиндра, и дополнительным гидрораспредипителем, соединенным трубопро20водами с парораспределителем, и насосом .
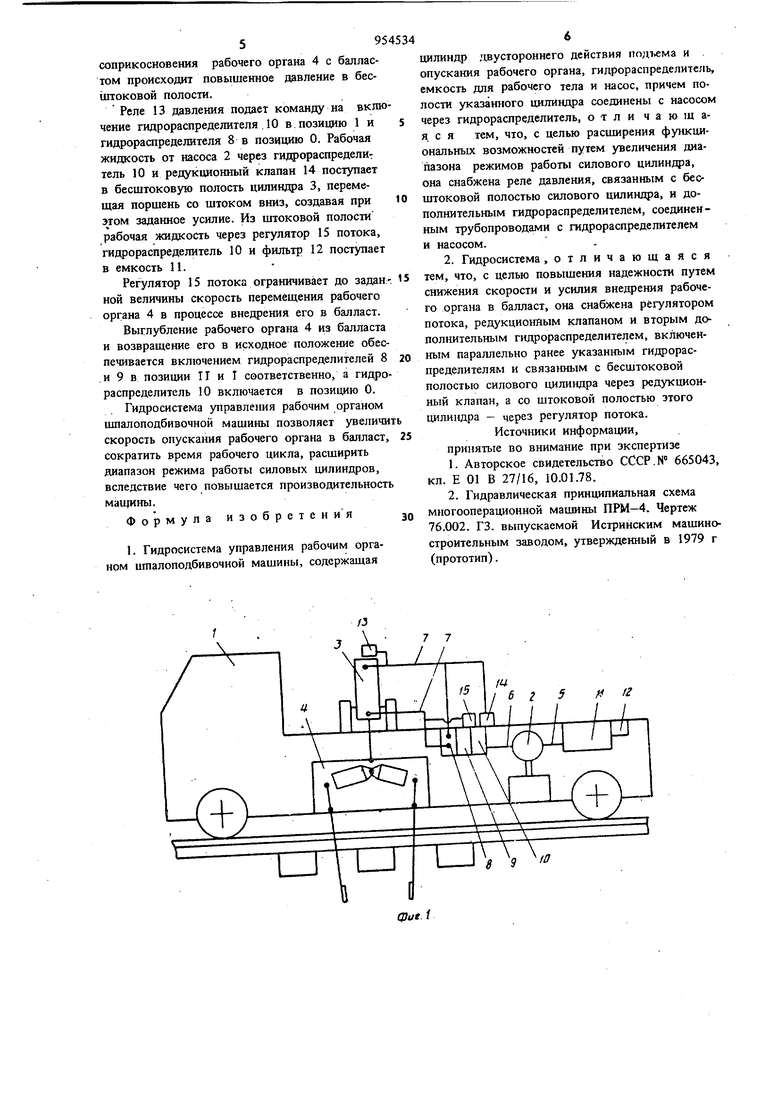
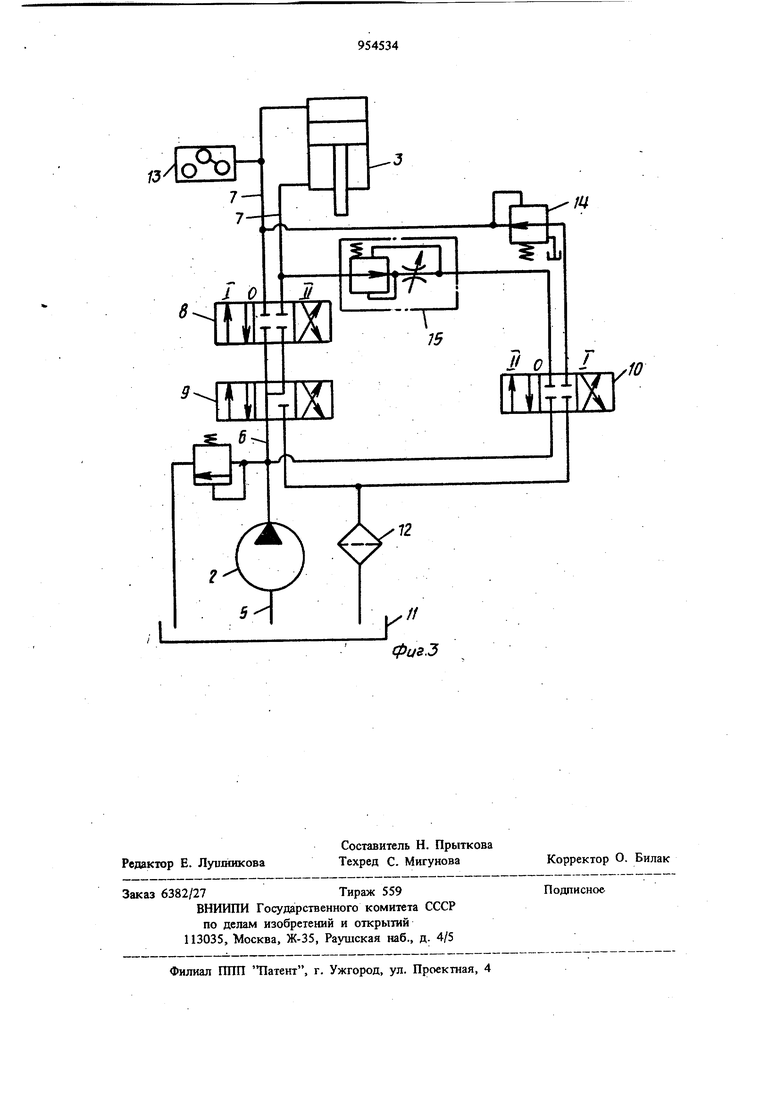
Кроме этого, с целью повышения надежности путем снижения скоросги и усиления 3954 при внедрении рабочего оргаиа в балласт, гидросистема снабжена регулятором потока, редукционным клапаном и вторым дополнительным гидрораспределителем, включенным параллельно ранее указанным гадрораспределигелям и связанным с бесштоковой полостью силового цилиндра через рёдукцийнный клапан а со ШТОКОБОЙ полостью этого цилиндра - через регулятор потока. На фиг. 1 изображена шпалоподбивочная машина, общий вид; на фиг. 2 - гидравлическая схйма управления рабочим органом, выполненнъ л в виде подбоек; на фиг. 3 - то же, в виде виброплит. Шпалоподбивочная машина содержит раму 1, установленную на ходовые тележки, на которой смоктированы насос 2, силовой цилиндр 3 подъема и опускания рабочего органа 4, труббпроводы 5-7, гидрораспределитель 8, ДОПОЛНИТЕЛЬНЫЙ. п-{дрорг спредеяитель 9, второй дополни сгыгый гадрораспределитель 10, включенный параллельно с гидрораспределителями 8 и 9, лмкость 11, фильтр 12, реле 15 давления, редукщга ный клапан 14 и регулятор 15 потока В процессе уплотнения балласта межд) шпалами подбойки-рабочего органа 4 заглубляются в балласт при выдвижении штока силовог цилиндра 3. Выглубление подбоек из балласта производится этим же цилиндром 3. После вы глублегош подбоек происходит переезд машины к следующей шпале. Емкость И посредством трубопровода 5 соединена с насосом. 2, который трубопроводом 6 соединен с дополнительным гидрорасфеделителем 9, который в нейтральном положении соединяет отводы с шсосом. Отводы дополш- тельно гидрораспредепителя 9 соединены последовательно с напорным и сливным отверстиями гидрораспределителя 8, а выходные отверстия - трубопроводами 7 с полостями сило вого цилиндра 3. В трубопровод, соединяющий гидрораспределитель 8 с бесштоковой полостью, включено реле 13 давления,. При остановке машины над шлалой, которую надо подбить, гидрораспределитель 8 находится в нейтральной позиции (0), обеспечивая запирание полостей цилиндра 3, тем самым фиксируя рабочий орган 4 в исходном положении. Для опускания органа 4 гидоораспределитель 8 включается в позиции 1, при этом обешечивается соединение обеи,х полостей силового цилиндра 3 с насосом Рабочая жидкость от насоса 2 поступает в гндрораспредрлитель 9, соединяется с жидкость из штоковой полости цилиндра 3 и поступает в бесштоковую полость цилиндра. Это позволяе развивать скорость штока, значительно больи1ую чем при подаче рабочей жидкости от насоса прямо в бссштоковуте полость, а из штоковой полости спивать в емкость 11. При соприкосновении подбоек с балластом озрастает усилие на штоке цилиндра 3, препяттвующее их внедрению в балласт, что вызывает овышение давления в бесштоковой полости илиндра 3. На это повышение давления реагирует реле 3 давления и подает команду на включение ополнительного гидрораспределителя 9 в озицию 1. Скорость погружения подбоек замедляется, о при этом возрастает усилие на штоке, ействующее вниз, так как в позиции 1 гидрораспределитель 9 соединяет бесштоковую полость цилиндра 3 с насосом 2, а штоковую полость со сливом. Следовательно, усилие F на штоке со стороны рабочей жидкости будет F pSn где р - давление в поршневой полости; площадь поршня. Это усилие больше усилия, которое было в процессе опускания рабочего органа до соприкосновения с балластом, так как тогда оно определялось РП П РШТ и)ТП где Pf - давление бесштоковой полости; р - давление в штоковой полости; luirT площадь поршня; fY площадь штоковой полости. Г5«)гя Sn - SIUT, где S(UT- площайь штока). Использование данной схемы привода позволяет увеличить скорость опускания рабочего органа из исходного рабочего положения до соприкосновения с балластом, а следовательно, сократить время цикла. Выглубление рабочего органа с подбойками достигается включением гидрораспредели гелей, 8 и 9 в позицию ТГ. При использовании вместо подбоек поверхностных уплотнителей (виброгшит), кроме быстрого опускания рабочего органа из исходного положе ния до соприкосновения с балластом, необходимо обеспечивать ограничен- ные усилие прижатия уплотнителя к балласту и скорость его погружения в балласт. Из схемы, приведенной на фиг. 3, видно, что параллельно гидрораспределителям 8 и 9 установлен гидрораспределитель 10, выходы из которого соединены с цилиндром f, причем с бесштоковой полостью цилиндра он соеш1нен через редукционный клапан 14, который понижает давление в бесштоковой полости до заданного значения, а со штоковой полостью через регулятор потока 15, который ограничивает поток, вытекающий из бесштоковой полости , до заданной величины. . При включении гндрораспределителя 8 в позициио 1 происходит подача рабочей жидкости от насоса 2 и штоковой полости цилиндра 3 в бесштоковую полость цилиндра 3. После 59 соприкосновения рабочего органа 4 с балластом происходит повышенное давление в бесштоковой полости. Реле 13 давления подает команду на вклю чение гидрораспределителя , 10 в.позицию 1 и гидрораспределителя 8 в позицию 0. Рабочая жидкость от насоса 2 через гидрораспределитель 10 и редукционный клапан 14 поступает в бесштоковую полость цилиндра 3, перемещая поршень со штоком вниз, создавая при этом заданное усилие. Из штоковой полости .рабочая жидкость через регулятор 15 потока гидрораспределитель 10 и фильтр 12 поступает в емкость 11.. Регулятор 15 потока ограничивает до задан НОИ величины скорость перемещения рабочего органа 4 в процессе внедрения его в балласт Выглубление рабочего органа 4 из балласта и возвращение его в исходное положение обеспещ1вается включением гидрораспределителей 8 и 9 в позиции TI и I соответственно, а гидрораспределитель 10 включается в позицию О Гидросистема управления рабочим органом Щпалоподбивочной машины позволяет увеличит скорость опускания рабочего органа в балласт сократить время рабочего цикла, расширить диапазон режима работы силовых цилиндров вследствие чего.повышается производительность мащины. Формула изобретения 1. Гидросистема управления рабочим органом цшалоподбивочной машины, содержащая
г //
д-V
8 9 /
О
фиг. i л пМ ,сз«:, 4 цилиндр двустороннего действия подъема и опускания рабочего органа, гидрораспределитель, емкость для рабочего тела и насос, причем полости указанного цилиндра соединены с насосом через гидрораспределитель, отли чающаяся тем, что, с целью расширения функциональных возможностей путем увеличения диапазона режимов работы силового цилиндра, она снабжена реле давления, связанным с штоковой полостью силового цилиндра, и дополнительным гидрораспределителем, соединенным трубопроводами с гидрораспределителем и насосом. 2. Гидросистема .отличающаяся тем, что, с целью повышения надежности путем снижения скорости и усилия внедрения рабочего органа в балласт, она снабжена регулятором потока, редукциотым клапаном и вторым дополнительным гидрораспределителем, включенным параллельно ранее указанным гидрораспределителям и связанным с бесштоковой полостью силового цилиндра через редукционный клапан, а со штоковой полостью этого цилиндра - через регулятор потока. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 665043 л. Е 01 В 27/16, 10.01.78. 2.Гидравлическая принципиальная схема ногооперационной машины ПРМ-4. Чертеж 6.002. ГЗ. выпускаемой Истринским машинотроительным заводом, утвержденный в 1979 г прототип). / /5
р
/У О
/
р
II
7 с
.-Ш
41
1г
И
