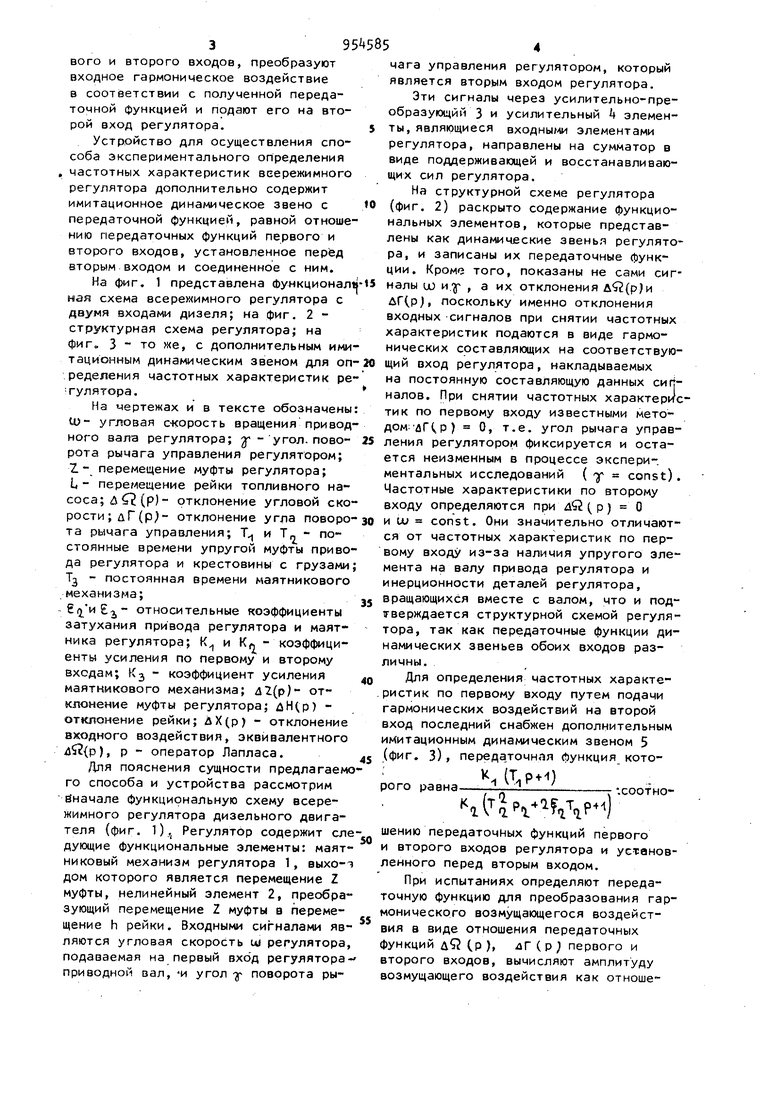
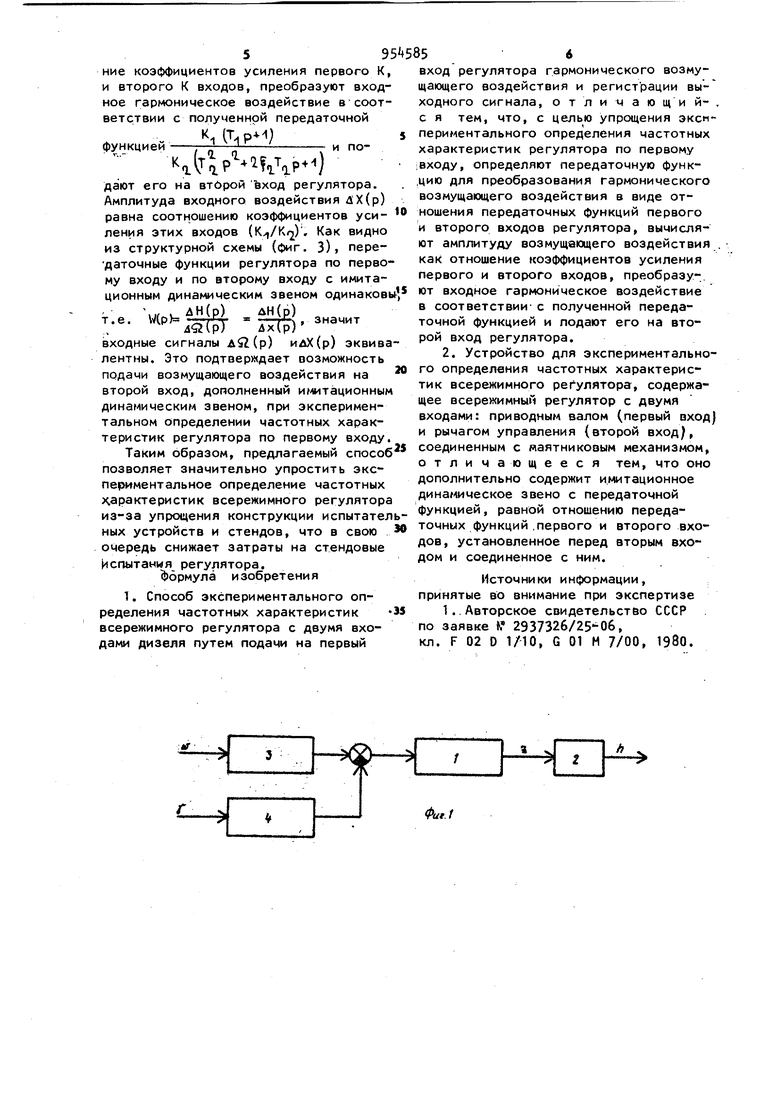
395 вого и второго входов, преобразуют входное гармоническое воздействие в соответствии с полученной передаточной функцией и подают его на второй вход регулятора. Устройство для осуществления способа экспериментального определения частотных характеристик всережимного регулятора дополнительно содержит имитационное динамическое звено с передаточной функцией, равной отношению передаточных функций первого и второго входов, установленное перёд вторым входом и соединенное с ним. На фиг. 1 представлена функционал1 ная схема всерек имного регулятора с двумя входами дизеля; на фиг. 2 структурная схема регулятора; на фиг, 3 то же, с дополнительным имитационным динамическим звеном для опредеяения частотных характеристик ре гулятора. На чертежах и в тексте обозначены угловая с-корость вращения приводного вала регулятора; у - угол, поворота рычага управления регулятором; I - перемещение муфты регулятора; L- перемещение рейки топливного наcoca; йО.(р)- отклонение угловой окорости;йГ( отклонение угла поворота рычага управления; Т и „ - постоянные времени упругой муфты привода регулятора и крестовины с грузами Tj - постоянная времени маятникового механизма; (.), относительные коэффициенты затухания привода регулятора и маятника регулятора; К и Кл - коэффициенты усиления по первому и второму входам; Кз коэффициент усиления маятникового механизма; 41(р)- отклонение муфты регулятора; jiHtp) отклонение рейки; дХ(р) - отклонение входного воздействия, эквивалентного ), р - оператор Лапласа. Лля пояснения сущности предлагаемо го способа и устройства рассмотрим йначале функциональную схему всережимного регулятора дизельного двигателя {фиг. 1) Регулятор содержит еле дующие функциональные элементы: маятниковый механизм регулятора 1, выхо-ч дом которого является перемещение Z муфты, нелинейный элемент 2, преобразующий перемещение Z муфты в перемещение h рейки. Входными сигналами являются угловая скорость UJ регулятора, подаваемая на первый вход регулятора - приводной вал, и угол -jr поворота рычага управления регулятором, который является вторым входом регулятора. Эти сигналы через усилительно-преобразукхдйй 3 и усилительный i элементы, являющиеся входны - элементами регулятора, направлены на сумматор в виде поддерживающей и восстанавливающих сил регулятора. На структурной схеме регулятора (фиг. 2) раскрыто содержание функциональных элементов, которые представлены как динамические звенья регулятора, и записаны их передаточные функции. Кроме того, показаны не сами сигналы u) M.jp , а их отклонения Д(р)и ), поскольку именно отклонения входных сигналов при снятии частотных характеристик подаются в виде гармонических составляющих на соответствующий вход регулятора, накладываемых на постоянную составляющую данных сигналов. При снятии частотных характеристик по первому входу известными методом лГ р) О, т.е. угол рычага управления регулятором фиксируется и остается неизменным в процессе экспери-. ментальных исследований ( j const). Частотные характеристики по второму входу определяются при uQ ( р) О Они значительно отличаюти LW const. ся от частотных характеристик по первому входу из-за наличия упругого элемента на валу привода регулятора и инерционности деталей регулятора, вращающихся вместе с валом, что и подтверждается структурной схемой регулятора, так как передаточные функции динамических звеньев обоих входов различны. Для определения частотных характеристик по первому входу путем подачи гармонических воздействий на второй вход последний снабжен дополнительным имитационным динамическим звеном 5 (фиг. З), переда,точнля функция котоM ip) рого равна гсоотноivi4 a4P) (,4 шению передаточных функций первого и второго входов регулятора и установленного перед вторым входом. При испытаниях определяют передаточную функцию для преобразования гармонического возмущающегося воздействия в виде отношения передаточных функций д (р ), лГ ( р первого и второго входов, вычисляют амплитуду возмущающего воздействия как отношение коэффициентов усиления первого К, и второго К входов, преобразуют входное гармоническое воздействие в соответртвии с полученной передаточной ) функциейг-г-гг и ) дают его на втброй вход регулятора. Амплитуда входного воздействия ДХ(р) равна соотношению коэффициентов усипения этих входов (K/i/Ki). Как видно из структурной схемы (фиг. 3), передаточные функции регулятора по первому входу и по второму входу с имитационным динамическим звеном одинаков и ДН(р) ДН(р) входные сигналы дЛ(р) идХ(р) эквива лентны. Это подтверждает возможность подачи возмущающего воздействия на второй вход, дополненный имитационным динамическим звеном, при экспериментальном определении частотных характеристик регулятора по первому входу. Таким образом, предлагаемый способ позволяет значительно упростить экспериментальное определение частотных характеристик всережимного регулятора из-за упрощения конструкции испытател ных устройств и стендов, что в свою очередь снижает затраты на стендовые Испытания регулятора. Формула изобретения Т. Способ экспериментального определения частотных характеристик всережимного регулятора с двумя входами дизеля путем подачи на первый вход регулятора гармонического возмущающего воздействия и регистрации выходного сигнала, отличающий-, с я тем, что, с целью упрощения эксппериментального определения частотных характеристик регулятора по первому ;Входу, определяют передаточную функ,цию для преобразования гармонического возмущающего воздействия в виде отношения передаточных функций первого и второго входов регулятора, вычисляют амплитуду возмущающего воздействия , как отношение коэффициентов усиления первого и второго входов, преобразу-. ют входное гармоническое воздействие в соответствии-с полученной передаточной функцией и подают его на второй вход регулятора. 2. Устройство для экспериментального определения частотных характеристик всережимного регулятора, содержащее всережимный регулятор с двумя входами: приводным валом (первый вход) и рычагом управления (второй вход, соединенным с иаятниковым механизмом, отличающееся тем, что оно дополнительно содержит имитационное динамическое звено с передаточной функцией, равной отношению передаточных функций .первого и второго входов, установленное перед вторым входом и соединенное с ним. Источники информации, принятые во внимание при экспертизе 1..Авторское свидетельство СССР по заявке W 2937326/25- 06, кл. F 02 D 1/10, G 01 М 7/00, 1980.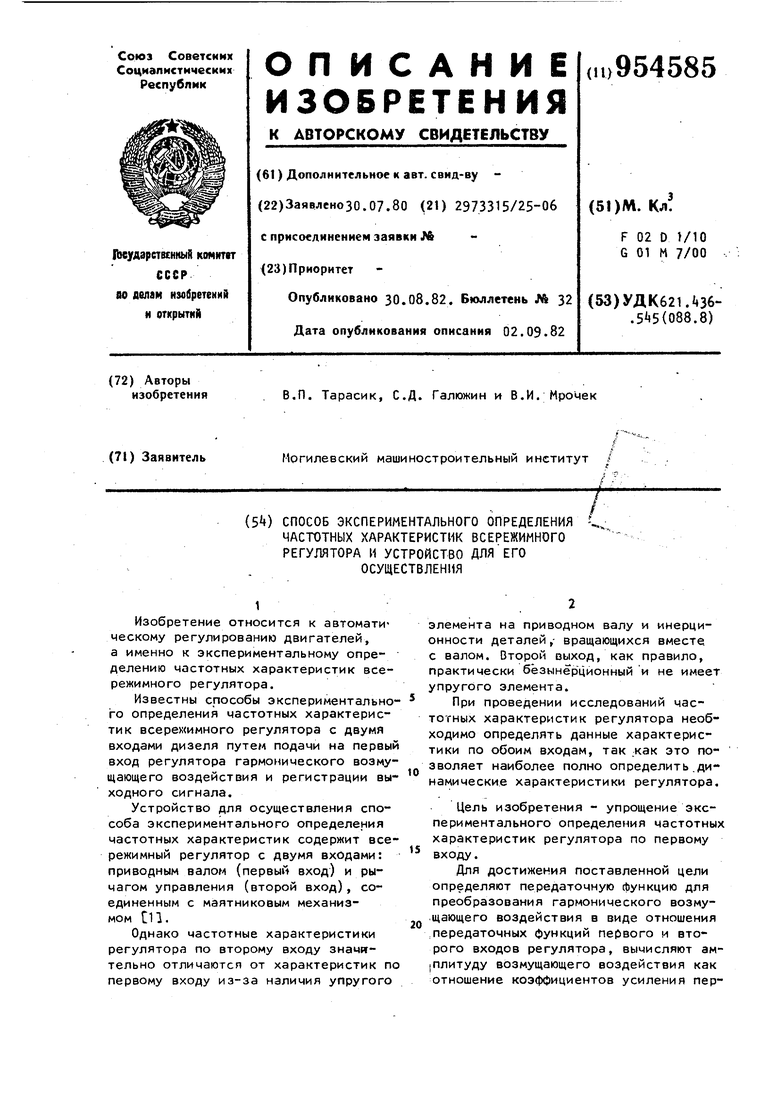
%/./
лЛ1П
Ki(r,
rJ ntJiftлги }
Xt
ДЛМ.
jhtTiP-f/
Фиг I .
A/ffJ
