(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система с комбинированным управлением | 1983 |
|
SU1136106A2 |
| Следящая система | 1986 |
|
SU1401436A2 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Устройство для дистанционной передачи угла | 1978 |
|
SU686051A1 |
| Следящая система | 1981 |
|
SU999016A1 |
| Устройство для дистанционной передачи углового перемещения | 1984 |
|
SU1275511A1 |
| ДАТЧИК ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 2000 |
|
RU2209459C2 |
| Двухканальная следящая система | 1983 |
|
SU1200236A1 |
1
Ивобретение относится к автоматическому у1фавлению и может быть использовано в системах автоматического регулирования повьпяешюй ТОЧНОСТИ и плав- , ности. -,
Известно устройство автоматического управления, содержащее сельсин-датчик, сельсин-приемник, усилитель, исполнитель ный механизм, а также эталонную модель и механизм настройки различных корректирующих звеньев l ,
Недостаток известного устройства низкая точность устройства в связи с изменением крутизны выходной характеристики сельсина-датчика, обусловленная изменением нагрузки.
Наиболее близким Е предлагаемому по технической сущности является устройство, содержащее дистанционную передачу, состоящую из сельсина-датчика н сольсина-приемника, усилитель мощности и исполнительный механизм, кинематически сБязат1ый с сельсином-прием1шком и с Нгируокой 2 .
Недостаток известного устройства заключается в том, что сигнал ошибки 0g снимаемый с выхода сельсина-приемника после усиления, подается на исполнительный механизм, который вращает ось гфиемника со скоростью, равной скорости вращения сельсина-датчика. Если бы крутизна выходной характеристики дистанци онной передачи была величиной постоянной, то сигнал рассогласования Qg при ращении сельсина-датчика с постоянной скоростью был бы также величиной постоянной.
Однако некоторые сельсины (например, сельсины типа 913А, 575МА, 507 и др.) имеют не постоянную, а пульсирующую крутизну выходной характвристииси днстапионной передачи датчик-приемник, величина которой зависит от угла поворота датчика, причем частота п.ул1)Сапий за один оборот датчика равна числу его пар полюсов.
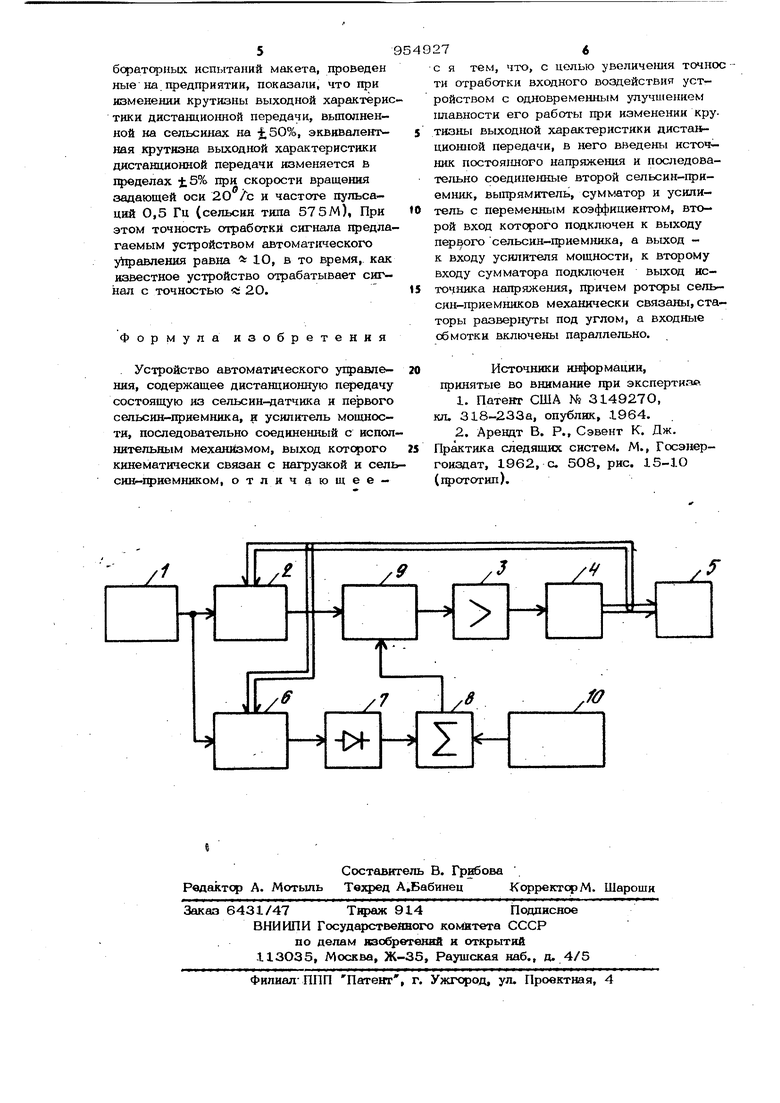
В этих датчиках крутизне вь)ходной характеристики изменя т :-я и 1 ,Г)-3 раза. Скоростная ошибка устройства oripe- деляется из формулы s«4 51 где S2 - скорость слежения; Ко - добротность системы по скорос ти, которая пропорциональна крутизне выходной характеристики. Наличие пульсаций крутизны выходной харшстеристики в известном устройстве 1риводит к пульсациям динамической оши ки и, как следствие, ухудшению плавности работы устройства. Кроме того, недостатком устройства является низкая точность, обуЪловленная изменением крутизны выходной характери тики сельсина-датчика при изменении нагрузки дистанционной передачи. Цель изобретения - увеличение точнос ти устройства автоматического управления с одновременным улучшением плавнос ти его работы при изменении крутизны выходной характеристики дистанционной передачи. Поставленная цель достигается тем, что .в устройство автоматического управления, содержащее дистанционную передачу, состоящую из сельсина-датчика и первого сельсина-приемника, и усилитель мощности, последовательно соединенный с исполнительным механизмом, выход ко торого кинематически связан с нагрузкой и сельсином-приемником, введены источник постоянного напряжения, и последовательно соединенные второй сельсин-приемник, выпрямитель, сумматор и усилитель с переменным коэффициентом, второй вход которого подключен к выходу первого сельсина-приемника, а выход к входу усилителя мощности, к второму входу сумматора подключен выход источ,нкка напряжения, причем роторы сельсинов- 1риемников механически связаны, ст развернуты под углом, а входные обмотки включены параллельно. На чертеже показана схема предлага емого устройства. Устройство содержит сельсин-датчик и сельсин-приемник ,2, усилитель 3 мощ ности, соединенный последовательно с ис полнительным механизмом 4. Выход исп нительного механизма 4 кинематически связан с нагтруакой 5 н сельсином-щэием НИКОМ 2, второй сельсин-приемник 6, вы гфямитель 7, сумматс э 8, усилитель 9 перемега&тм коэффициентом усиления и ИСТОЧНИК 10 постоянного напряжения, выход которого подключен к второму входу сумматора 8. При этом ротсры сельсинов 2 и 6 механически соединены, статоры развернуты один относительно другого, а входные обмотки включены параллель- но. Первый вход усилителя 9 соединен с выходом сельсина-приемника 2, второй вход - с Выходом сумматора 8, а выход - с входом усилителя мощности 3. , Устройство автоматического управления работает следующим образом. Статор второго сельсина-приемника 6, как уже указывалось выше, развернут относительно статора основного сельсинаприемника 2 на некоторый угол. Такое положение сельсина-приемника 6 дает возможность получения на его выходе напряжения, пропорционального крутизне выходной характеристики дистанционной передачи, в режиме слежения устройства. Это напряжение, выпрямленное и просуммированное с постоянным напряжением от источника 10, поступает на управляющий вход усилителя 9 с переменным коэффициентом усиления, на первый вход которого приходит сигнал рассогласования с выхода сельсина-приемника 2,, При увеличении нагрузки дистанционной передачи, а соответственно и. крутизны ее выходной характеристики напряжение на выходе сельсина-приемника 6 растет. Это в свою очередь приводит к уменьшению коэффициента усиления 9, гфичем эквивалентная крутизна дистанционной передачи, равная произведению т экугцих значений крутизны выходной характеристики дистанционной передачи и коэффициента усиления усилителя 9, остается практически неизменной. Таким образом, изменение нагрузки диста1щионной передачи, выполненной на сельсинах, практически не оказывает влияния на точность работы устройства автоматического управления. Кроме того, предлагаемое устройство исключает влияние пульсаций выходной характеристики дистанционной передачи на сельсинах на плавность работы устройства. Положительный эффект от использования предлагаемого устройства ho сравнению с известным заключается в увеличении точности отработки входного воздействия устройством автоматического управления примерно в 2 раза при изменении крутизны выходной характеристики Дистанционной передачи. Результаты лабораторных испытаний макета, проведен ные на предприятии, показали, что при изменении крутизны выходной характеристики диста1щио1даой передачи, вьшопненной на сельсинах на 50%, эквивалентная крутизна выход1юй характеристики дистанционной передачи изменяется в гфвделах t5% при скорости вращения задающей оси 2О /с и частоте пульсаций 0,5 Гц (сельсин типа 575М), При этом точность отработки сигнала предлагаемым устройством автоматического у фавления равна 10, в то время, как известное устройство отрабатывает сигнал с точностью «20.
Формула изобретения
Устройство автоматического управлекия, содержащее дистанционную передачу состоящую из сельсин-датчика и первого сельсин-приемника, и усилитель мощности, последовательно соединенный с исполнительным механизмом, выход которого кинематически связан с нагрузкой и сельсив-щзиемником, отличающее -
с я тем, что, с целью увеличения точно ти отработки входного воздействия устройством с одновременным улучшением гшавности его работы при изменении кру. тизны выходной характеристики дистанционной передачи, в него введены источник постоя1шого напряжешш и последовательно соединенные второй сельсин-приемник, выпрямитель, сумматор и усилитель с переменным коэффициентом, второй вход которого подключен к выходу первого сельсин-приемника, а выход к входу усилителя мощности, к второму входу сумматора подключен выход источника напряжения, причем роторы сельсин-приемников механически связаны, статоры развернуты под углом, а входные обмотки включены параллельно.
Источники информации, принятые во внимание при экспертиае
