4:
СО О5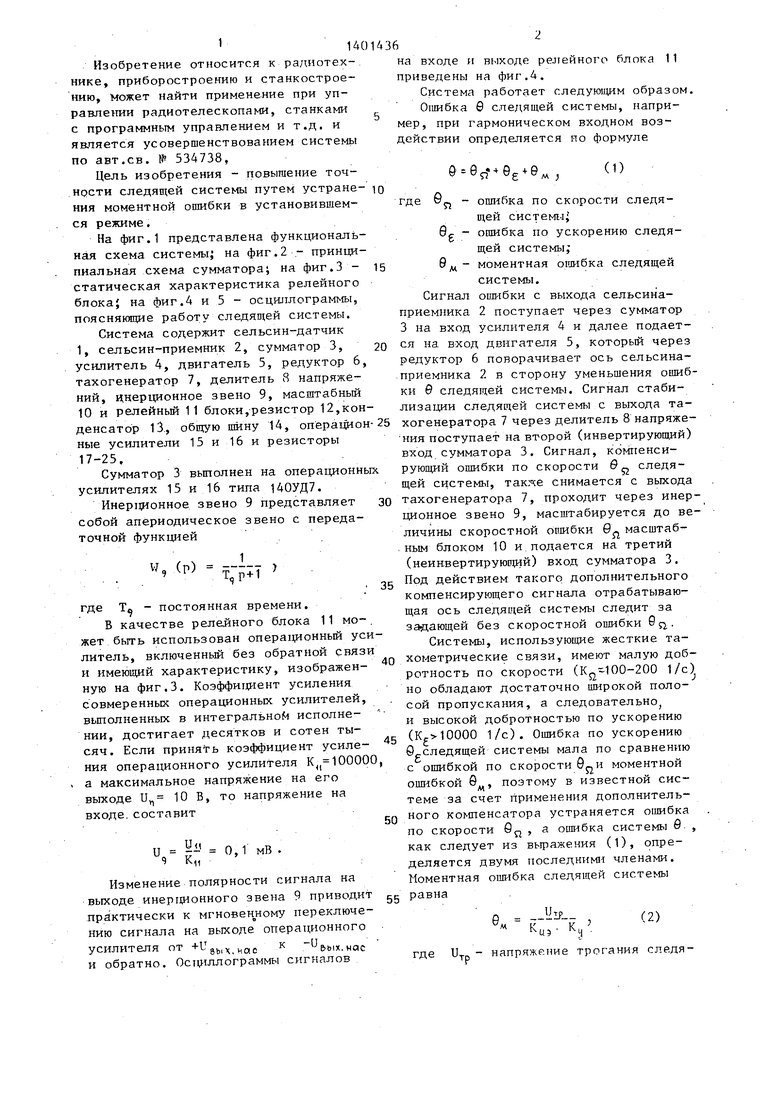
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Следящая система | 1977 |
|
SU703776A1 |
| Следящая система | 1975 |
|
SU534738A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| Устройство автоматического управления | 1981 |
|
SU954927A1 |
| Следящая система | 1981 |
|
SU968783A2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU366454A1 |
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
| Следящая система комбинированного управления | 1980 |
|
SU881655A1 |
Изобретение относится к области радиотехники, приборостроения и станкостроения,, может найти применение при управлении радиотелескопами, стайками с программным управлением и т.д. и является усовершенствованием известной системы по авторскому свидетельству № 534738. Целью изобретения является повышение точности системы путем устранения моментной ошибки в установившемся режиме. Поставленная цель достигается за счет того, что сигнал рассогласования с выхода сельсина-приемника поступает на вход сумматора, усиливается и отрабатывается двигafeлeм, который через редуктор вращает вал сельсина-приемника. Скорость вращения вала двигателя измеряется тахогенератором,выходной сигнал которого через делитель напряжения поступает на второй вход усилителя, через инерционное звено и масштабньй блок - на третий вход сумматора, а через инерционное звено и релейный блок - на четвертый вход сумматора. 5 ил. сл
ю
Изобретение относится к радиотехнике, приборостроению и станкостроению. Может найти применение при управлении радиотелескопами, станками с программным управлением и т.д. и является усовершенствованием системь по авт.св. № 534738,
Цель изобретения - повышение точности следящей системы путем устране- ния моментной ошибки в установившемся режиме.
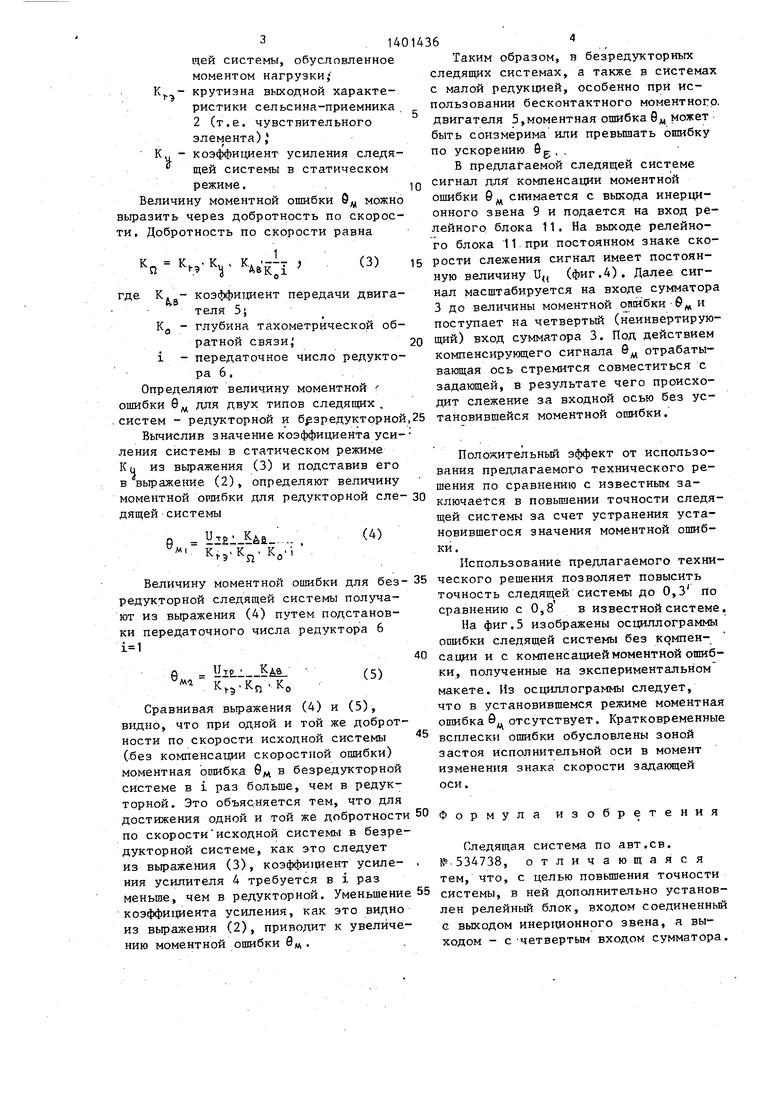
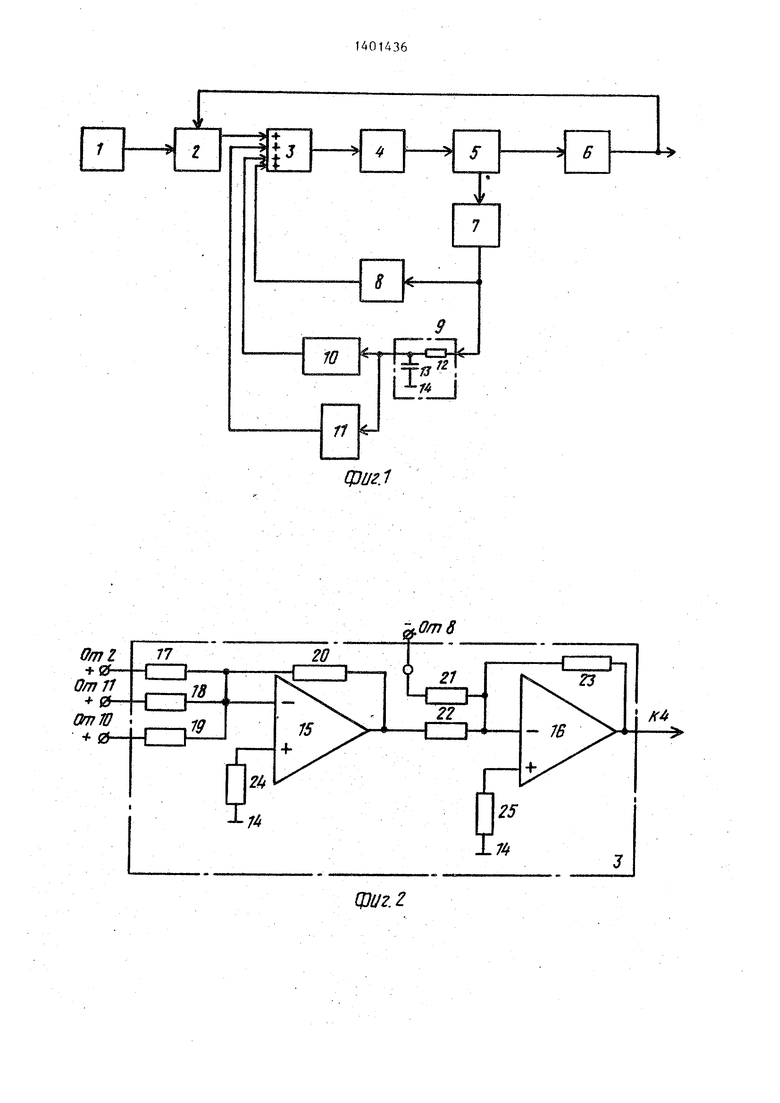
На фиг.1 представлена функциональная схема системы; на фиг.2 - принципиальная схема сумматора на фиг.З - статическая характеристика релейного блока} на фиг.4 и 5 - осциллограммы, пояснякицие работу следящей системы.
Система содержит сельсин-датчик 1, сельсин-приемник 2, сумматор 3, усилитель 4, двигатель 5, редуктор 6, тахогенератор 7, делитель 8 напряжений, инерционное звено 9, масштабный
Сигнал оишбки с выхода сельсина- приемника 2 поступает через сумматор 3 на вход усилителя 4 и далее подается на вход двигателя 5, который через редуктор 6 поворачивает ось сельсина- приемника 2 в сторону уменьшения ошибки б следящей системы. Сигнал стабилизации следящей системы с выхода та10 и релейньй 11 блоки,резистор 12,конденсатор 13., общую шину 14, операцион-25 хогенератора 7 через делитель 8 напряже- ные усилители 15 и 16 и резисторы ния поступает на второй (инвертирующий) 17-25,
Сумматор 3 выполнен на операционных усилителях 15 и 16 типа 140УД7.
30
Инерционное звено 9 представляет собой апериодическое звено с передаточной функцией
вход сумматора 3. Сигнал, компенсирующий ошибки по скорости б следящей системы, такле снимается с выхода тахогенератора 7, проходит через инерционное звено 9, масштабируется до величины скоростной оишбки 0,« масштабным блоком 10 и подается на третий (неинвертирующий) вход сумматора 3. Под действием такогр дополнительного компенсирующего сигнала отрабатывающая ось следящей системы следит за задающей без скоростной ошибки б Q. .
V7, (р)
1
т,р-И
)
где Т - постоянная времени.
В качестве релейного блока 11 мо-. жет быть использован операп 1онный усилитель, включенный без обратной связи и имеющий характеристику, изображенную на фиг.З. Коэффициент усиления совмеренных операционных усилителей, выполненных в интегральной исполнении, достигает десятков и сотен тысяч. Если принять коэффициент усиления операционного усилителя К,, 100000 а максимальное напряжение на его выходе и 10 В, то напряжение на входе, составит
ГГ
,,
мВ
Изменение полярности сигнала на выходе инердаонного звена 9 приводит практически к мгновен ному переключению сигнала на выходе операционного
усилителя от +и
8bix. нас
и обратно. Оспдшлограммы
на входе и выходе релейного блока 11 приведены на фиг.4.
Система работает следую11:1им образом.
Ошибка 0 следящей системы, например, при гармоническом входном воздействии определяется ио формуле
о е„-4е,.е,
(1)
0мгде 65, - onni6Ka по скорости следящей системы;
6g - ошибка по ускорению следящей системы;
моментная ошибка следящей системы.
Сигнал оишбки с выхода сельсина- приемника 2 поступает через сумматор 3 на вход усилителя 4 и далее подается на вход двигателя 5, который через редуктор 6 поворачивает ось сельсина- приемника 2 в сторону уменьшения ошибки б следящей системы. Сигнал стабилизации следящей системы с выхода тахогенератора 7 через делитель 8 напряже- ния поступает на второй (инвертирующий)
хогенератора 7 через делитель 8 напряже- ния поступает на второй (инвертирующий)
вход сумматора 3. Сигнал, компенсирующий ошибки по скорости б следящей системы, такле снимается с выхода тахогенератора 7, проходит через инерционное звено 9, масштабируется до величины скоростной оишбки 0,« масштабным блоком 10 и подается на третий (неинвертирующий) вход сумматора 3. Под действием такогр дополнительного компенсирующего сигнала отрабатывающая ось следящей системы следит за задающей без скоростной ошибки б Q. .
Системы, используюшле жесткие та- хометрические связи, имеют малую добротность по скорости (К -100-200 1/с) но обладают достаточно широкой полосой пропускания, а следовательно и высокой добротностью по ускорению (Кс 10000 1/с). Ошибка по ускорению 0,.следящей системы мала по сравнению с ошибкой по скорости б„и моментной ошибкой б., поэтому в известной системе за счет применения дополнительного компенсатора устраняется опшбка по скорости б , а ошибка системы б. , как следует из выражения (1), определяется двумя последними членами. Моментная ошибка следящей системы равна
и
IPК
Ц5
К:
(2)
где
напряжение трогания следя 1401436
щей системы, обусловленное моментом нагрузки;
,- крутизна выходной характеристики сельсина-приемника 2 (т.е. чувствительного элемента),
- коэффиту ент усиления следящей системы в статическом режиме.
10
сл с по д бы по
си ош он ле го
Величину моментной ошибки 6f можно выразить через добротность по скорости. Добротность по скорости равна
Kfj -
V
Авк;1
где К. - коэффитщент передачи двигателя 5 5
Kg - глубина тахометрической обратной связи,
i - передаточное число редуктора 6 .
Определяют величину моментной оиибки 9 для двух типов следящих, систем - редукторной и брзредукторной,25 тановившейся моментной ошибки.
Вычислив значение коэффициента УСИ-- ления системы в статическом режиме Кц из вьфажения (3) и подставив его в выражение (2), определяют величину моментной оршбки для редукторной еле- ЗО дящей системы
15 рости слежения сигнал имеет пос ную величину и, (фиг.4). Далее нал масштабируется на входе сум 3 до величины моментной ояибки поступает на четвертый (неинвер
20 щий) вход сумматора 3. Под дей компенсирующего сигнала б отр вающая ось стремится совместит задающей, в результате чего пр дит слежение за входной осью б
Положительньй эффект от испо вания предлагаемого техническо шения по сравнению с известным ключается в повьш1ении точности щей системы за счет устранения новившегося значения моментной ки.
ем,
UTB- К
.. К.
(4)
Положительньй эффект от использования предлагаемого технического решения по сравнению с известным заключается в повьш1ении точности следящей системы за счет устранения установившегося значения моментной ошибки.
Использование предлагаемого техни- Величину моментной ошибки для без- 35 ческого решения позволяет повысить
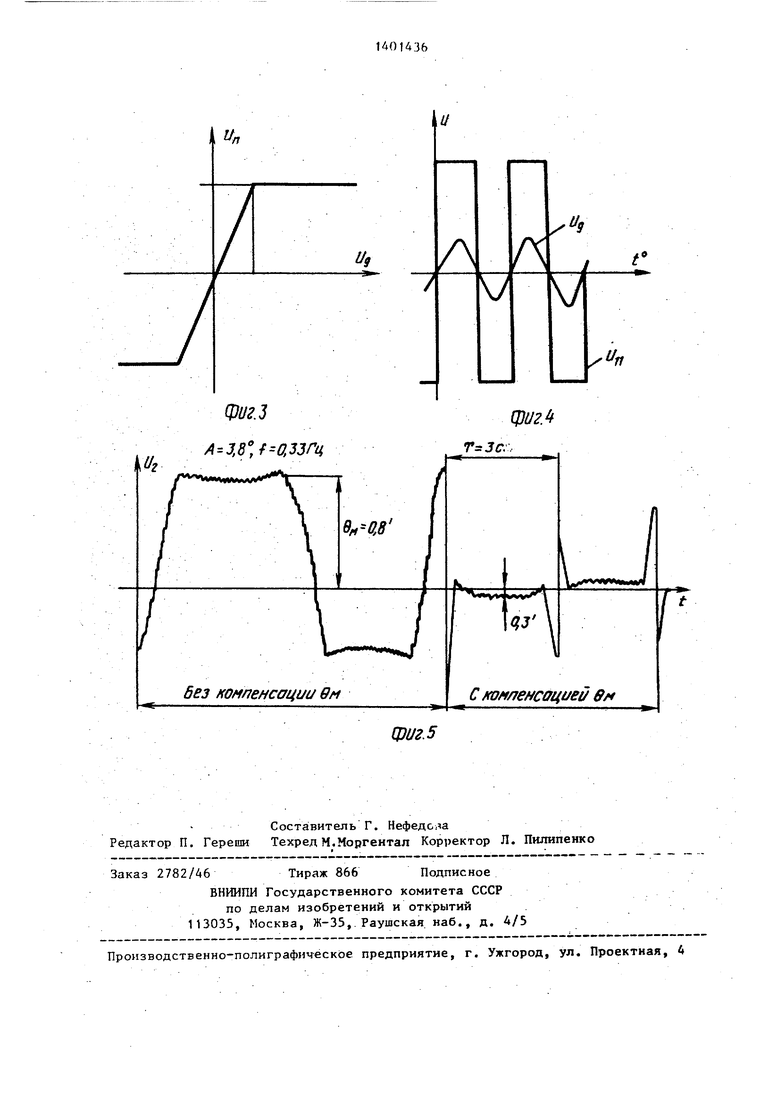
точность следящей системы до 0,3
редукторной следящей системы получают из выражения (4) путем подстановки передаточного числа редуктора 6
по сравнению с 0,8 в известной системе.
На фиг.5 изображены осциллограммы опшбки следящей системы без компен- 40 сации и с компенсацией моментной ошибки, полученные на экспериментальном
HiLi.
-КАв
К
1-Э
п KO
макете. Из осциллограммы следует, что в установившемся режиме моментная ошибками отсутствует. Кратковременные
Л
всплески ошибки обусловлены зоной застоя исполнительной оси в момент изменения знака скорости задакщей оси.
45
Сравнивая выражения (4) и (5), видно, что при одной и той же добротности по скорости исходной системы (.без компенсации скоростной ошибки) моментная ошибка Вц в безредукторной системе в i раз больше, чем в редукторной. Это объясняется тем, что для
достижения одной и той же добротности 50фор ул-а изобретения по скорости исходной системы в безредукторной системе, как это следуетСледящая система по авт.св. из выражения (3), коэффициент усиле- . №-534738, отличающаяся ния усилителя 4 требуется в i раз тем, что, с целью повьшгения точности меньше, чем в редукторной. Уменьшение 55 системы, в ней дополнительно установ- коэффициента усиления, как это видно лен релейный блок, входом соединенный из выражения (2), приводит к увелйче- с выходом инерщ онного звена, а вы- нию моментной ошибки б«, . . ходом - с-четвертым входом сумматора.
10
,25 тановившейся моментной ошибки.
Таким образом, в безредукторных следящих системах, а также в системах с малой редукцией, особенно при использовании бесконтактного моментногр. двигателя 5,моментная ошибка B может быть соизмерима или превьппать ошибку по ускорению Sg . ,
В предлагаемой следящей системе сигнал для компенсации моментной ошибки Q1 снимается с выхода инерционного звена 9 и подается на вход релейного блока 11. На выходе релейного блока 11 при постоянном знаке ско15 рости слежения сигнал имеет постоянную величину и, (фиг.4). Далее сигнал масштабируется на входе сумматора 3 до величины моментной ояибки-0 и поступает на четвертый (неинвертирую20 щий) вход сумматора 3. Под действием компенсирующего сигнала б отрабатывающая ось стремится совместиться с задающей, в результате чего происходит слежение за входной осью без ус-ЗО
Положительньй эффект от использования предлагаемого технического решения по сравнению с известным заключается в повьш1ении точности следящей системы за счет устранения установившегося значения моментной ошибки.
точность следящей системы до 0,3
по сравнению с 0,8 в известной системе.
На фиг.5 изображены осциллограммы опшбки следящей системы без компен- 40 сации и с компенсацией моментной ошибки, полученные на экспериментальном
макете. Из осциллограммы следует, что в установившемся режиме моментная ошибками отсутствует. Кратковременные
Л
всплески ошибки обусловлены зоной застоя исполнительной оси в момент изменения знака скорости задакщей оси.
45
фиг.1
OmZ
0/п8
Фиг.г
фиг.З
,8,.33rt4
Ц)иг.
фиг. 5
| Следящая система | 1975 |
|
SU534738A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| , | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
