(54) ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарная передача винт-гайка качения | 1979 |
|
SU916828A1 |
| Линейный электропривод | 2019 |
|
RU2735979C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672150C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672154C1 |
| Безредукторный электрический привод запорной арматуры | 2016 |
|
RU2659703C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИНТОВОЙ ПРИВОД | 2001 |
|
RU2190791C1 |
| МЕХАТРОННЫЙ МОДУЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2007 |
|
RU2351817C1 |
| ОРТОПЕДИЧЕСКИЙ АППАРАТ ОСТЕОСИНТЕЗА | 2006 |
|
RU2339332C2 |
| Привод трубопроводной запорной арматуры | 2002 |
|
RU2225558C1 |
| ЭЛЕКТРОПРИВОД КУЗНЕЦОВА | 1992 |
|
RU2075813C1 |
Изобретение относится к электромеханике и может быть использовано в точных силовых приводах, например, для привода подач станков, для привода роботов в грузоподъемных машинах. .
Известны электроприводы с встроенной в полый ротор несоосной передачей винт - гайка iQ .
Недостатком электроприводов, построенных на базе несоосных передач является то, что из-за пониженной несущей способности и жесткости, т.е. из-за малого числа параллельно работающих точек контакта в зацеплении резьб и большого числа последовательно расположенных в конструкции передачи стыков, эти электроприводы обладают недостаточной надежностью, точностью и плавностью работы.
. Наиболее близким к предлагаемому по технической сущности является электропривод, включающий электродвигатель, в полом роторе которого размещена передача винт - гайка 2 .
Недостатками известных приводов являются ограниченные возможности увеличения редукции в самой- передаче и недостаточная точность -привода.
Цель изобретения - увеличение точности привода.
Поставленная цель достигается тем, что электропривод снабжен вторым анало1ичным электродвигателем, винтовая передача которого расположена параллельно винтовой передаче первого .двигателя, причем оба винта жестко соединены между собой, имеют
10 равные хода при различном числе заходов резьбы на них, оба двигателя закреплены на одном основании, а передача винт - гайка выполнена с резьбовыми роликс1ми.
15
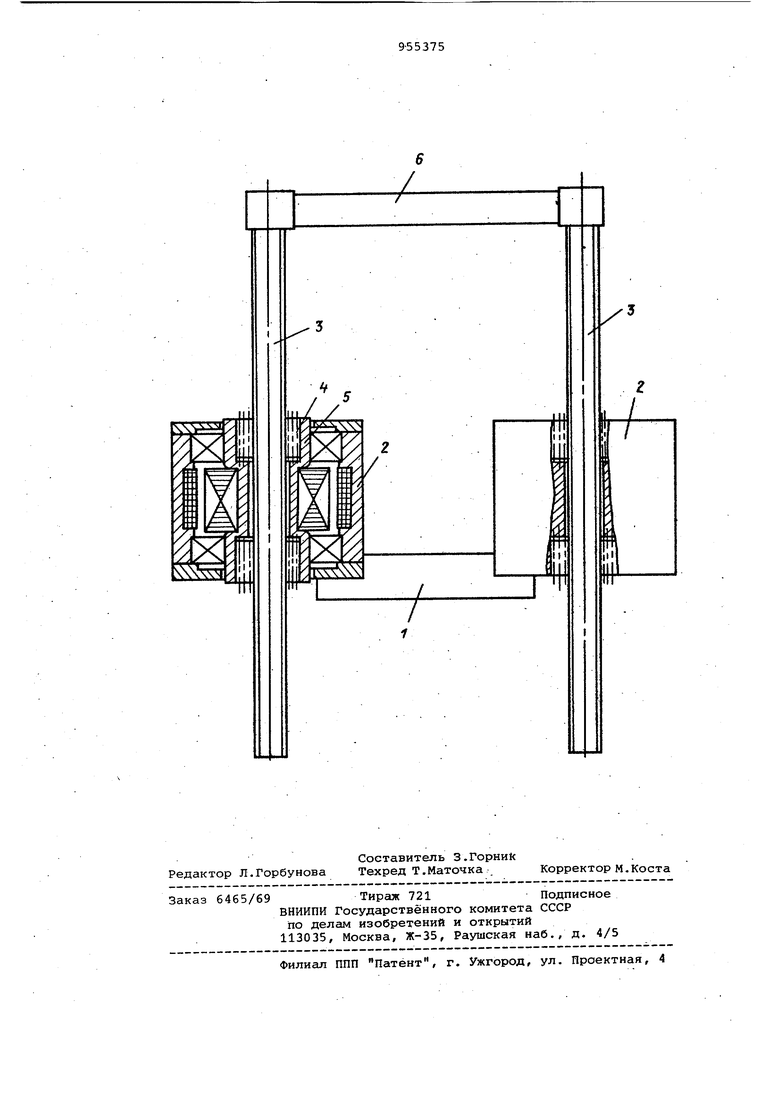
На чертеже изображен описываемый электропривод, общий вид.
Электропривод имеет два прикрепленных к основанию 1 электродвигателя 2 с планетарными передачами,
2q встроенными в полый ротор электродвигателя. Каждая передача содержит винт 3, сопряженный через резьбовые ролики 4, с гайками 5. Винты 3 жестко .связаны между собой перемдчкой 6.
25
Работу электропривода можно покс зать на примере расчета параметров его планетарной передачи.
Известно, что при различных накрЭС 30 лениях (левом и правом) резьбы на винте и роликах ход винта определяется по формуле И .-.п,, где S - шаг резьбы; k-i j/tJj- отношение среднего диаметра резьбы винта к сред нему диаметру резьбы роли ка; п,,и число заходов резьбы на винте и ролике соответст венно. Если, например,- принят-ь п,-1, получим () .Один винт может быть выполнен с правой резьбой с числом заходов , а другой с правой резьбой и числом заходов . Ролики и гайка выполнены с ле вой резьбой. Тогда при синхронном вращении роторов электродвигателей в-противоположных направлениях ход обоих винтов 3 при качении роликов будет одинаков и равен 0,68 . При пр скальзывании один винт должен был б перемещаться с ходом 3S в одну сторону , а другой - с ходов 5S в другую, что невозможно. Проскальзывания, при котором нарушается постоянство передаточного числа, в данном электроприводе не происходит. При проскальзывании резьбы ролик по резьбе винта хода винтов станови лись бы не равными, а это невозможно, так как винты жестко связаны ме ду собой, а скорости электродвигателей синхронизированы. Синхронизация скоростей может быть осуществлена за счет механической передачи или электрической связи. Предлагаемый электропривод обеспечивает высокое и постоянное передаточное число, позволяет компоновать привод без дополнительного редуктора, что повышает его точность при относительно небольших габаритах и массе. Такой электропривод предполагается использовать в. координатно-расточных станках с ЧПУ в механизмах подъема траверса. Формула изобретения Электропривод, включающий электродвигатель, в полом роторе которого размещена передача винт - гайка, о тличающийся тем, что, с це-лью повышения точности он снабжен вторым аналогичным электродвигателем, винтовая передача которого расположена параллельно винтовой передаче первого электродвигателя, причем оба винта жестко соединены между собой, имеют равные ходы при различном числе заходов реэьбы на них, оба двигателя закреплены на одном основании, а передача винт гайка выполнена с резьбовыми роликами. Источники информации, принятые BO внимание при экспертизе 1.Авторское свидетельство СССР 508867, кл. Н 02 К 7/10, 1973. 2.Патент США 3402308, кл. 310-80, 1968.
НИ)
