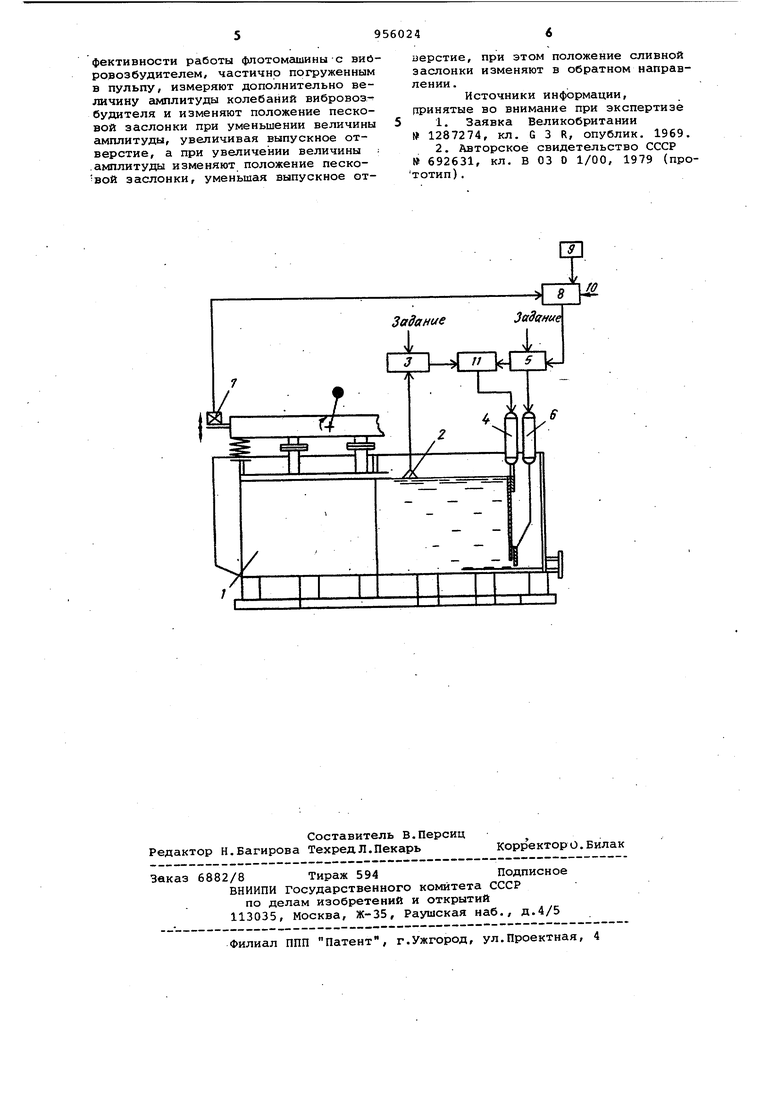
Изобретение относится к области обогащения полезных ископаемых и может быть использовано, например, при флотации руд.. Известен способ регулирования работы обогатительных машин на основе Стабилизации уровня пульпы в них путем изменения положения одного из шиберов (заслонок) сливного или пескового выпускных отверстий Недостатком cnodo6a является то, что при колебаниях производительности и при изменении задания на стабилизируемый уровень пульпы в широком диапазоне оказывается трудно выполнимым достижение требуемого качества регулирования одним управляющим воздействием - изменением положения шибера сливного или пескового otвepcтия. Кроме того, при колебаниях состава перерабатывае1 юй руды в камере.флотационной машины будет изменяться гранулометрический состав и плотность пульпы, в частности могут накапливаться крупные классы материала, которые нельзя своевременно вывести при регулировании флотомашины только по уровню пульпы. Это приводит к нарушению гидродикамики флотомашины и к ухудшению технологических показа-, телей. Известен способ автоматического управления флотационной машиной, за-, ключающийся в измерении уровня пульпы, изменении положения песковой заслонки, установленной на выпускном отверстии флотомашины, и изменении положения сливной заслонки в зависимости от положения песковой по уровню пульпы 2. Нарушения, вызываемые колебанием состава руды, не могут быть устранены в силу самого принципа управления - стабилизации только- уровня пульпы. Таким образом, при известном способе колебания крупности и плотности пульпы, связанные с колебаниями состава руды по флотируемости и измельчаемости, будут оказывать существенное влияние на гидродинамику работы флотомашины из-за несоответствия сечения пескового выпускного отверстия характеристикам перера1батываемого материала. Целью изобретения является повышение эффективности работы флотомаииины с вибровозбудителем, частично погруженным в пульпу. Цель достигается тем, что йзмеряп ют дополнительно величину амплитуды колебания вибровозбудителя и изменяют положение песковой заслонки при уменьшении величины амплитуды, увели чивая выпускное отверстие, а при уве личении величины амплитуды изменяют положение песковой заслонки, уменьшая выпускное отверстие, при этом по ложение сливной заслонки изменяют в обратном направлении. Способ реализуется следующим образом. При переработке более твердой или труднофлотируемой руды во флотрмашине происходит накопление крупных клйссов перерабатываемого материала. Соответственно повышается плотность пульпы и уменьшается амплитуда колебаний вибровозбудителя. Так, при повышении плотности.пульпы с 30 до 35% твердого амплитуда уменьшается примерно на 0,5 мм (см.таблицу). В зависимости от величины отклонения фак тической амплитуды от заданной изменяется автоматически положение заслонки пескового отверстия в сторону его увеличения для своевременного вывода крупных классов. При этом одновременнб с изменением положения . заслонки пескового отверстия от того же сигнала производится изменение положения заслонки сливного отверсти в сторону его уменьшения и тем самым предотвращается изменение заданного уровня пульпы. При увеличении амплитуды колебани вибровозбудителя, возникающем, напри мер, при переработке более мягкой ил легкофлотируемой руды, последовательность операций в способе изменяется в обратном порядке. На чертеже приведена блок-схема cиcтeIvIы автоматического регулирования с помощью которой осуществляется спо соб. Система содержит флотомашину 1, датчик 2 уровня пульпы, регулятор 3 положения заслонки сливного отверстия с задатчиком уровня, исполнительный механизм ,4 заслонки сливного отверстия, регулятор 5- положения заслонки пескового.отверстия с задатчиком амплитуды, исполнительный механизм 6 заслонки пескового отверстия, измеритель 7 амплитуды колебаний вибровозбудителя, переключатель 8, источник 9 постоянного сигнала, сигнал 10 пускателя вибровозбудит ля,согласующий блок 11. По каналу 2-11-4 осуществляется стабилизация уровня пульпы, чем достигается компенсация колебаний объемного расхода:пульпы. По каналу 7-8-5-6 осуществляется стабилизация амплитуды колебаний вибровозбудителя. С целью предотвращения изменения уровня пульпы при регулировании сечения пескового отверстия устройство содержит согласующий блок 11, который при изменении управляющего сигнала на исполнительный механизм песковой заслонки изменяет сигнал на исполнительный механизм сливной заслонки на соответствующую величину в противоположную сторону. В связи с тем, что в момент включения амплитуда колебаний достигает установившегося значения спустя некоторое время, измеритель 7 амплитуды подключается к регулятору через переключатель 8, который в момент nyclca от сигнала 10 пускателя вибровозбудителя отключает от регулятора измеритель 7 и подключает источник 9 постоянного сигнала. В таблице показана зависимость амплитуды колебаний вибровозбудителя от плотности,пульпы, позволяющая оценить эффективность способа.: Амплитудаколебаний , мм 9 Эти данные дают возможность по результатам измерений амплитуды колебаний вибровоэбудителя управлять режимом работы виброфлотомашины в услови-ях переменного состава руды, стабилизируя при этом.и уровень пульпы. . Изобретение позволяет повысить эффективность работы вибрационных флотомашин за счет более точного регулирования их не только при колебаниях поступающих на них потоков, но и при колебаниях состава сырья по измельчаемости и флотируемости. Формула изобретения Способ автоматического управления флотационной машиной, заключакхцийся в измерении уровня пульпы, изменении положения песковой заслонки, установленной на выпускном отверстии флотомашины, и изменении положения сливной заслонки в зависимости от положения песковой, отличающийс я тем, что, с целью повышения эффективности работы флотомашины с вибровозбудителем, частично погруженным в пульпу, измеряют дополнительно величину а мплитудн колебаний вибровоз будителя и изменяют положение песковой заслонки при уменьшении величины амплитуды, увеличивая выпускное отверстие, а при увеличении величины .амплитуды изменяют положение песко вой заслонки, уменьшая выпускное отверстие, при этом положение сливной заслонки изменяют в обратном направлении.
Источники информации, Г1ринятые во внимание при экспертизе
1.Заявка Великобритании
1287274, кл. G 3 R, опублик. 1969.
2.Авторское свидетельство СССР
692631, кл. в 03 О 1/00, 1979 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ФЛОТАЦИОННОЙ МАШИНОЙ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ФЛОТАЦИОННОЙ МАШИНОЙ | 2000 |
|
RU2165302C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ФЛОТАЦИОННОЙ МАШИНОЙ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ФЛОТАЦИОННОЙ МАШИНОЙ | 2001 |
|
RU2179891C1 |
| Способ стабилизации уровня пульпы в прямоточных флотомашинах | 1976 |
|
SU692631A1 |
| Способ управления качеством пенного продукта и устройство для его осуществления | 1980 |
|
SU1036382A1 |
| Устройство для стабилизации уровня пульпы во флотомашине | 1989 |
|
SU1722596A1 |
| Способ управления процессом флотации | 1982 |
|
SU1045937A1 |
| Разгрузочное устройство флотационной машины | 1983 |
|
SU1207492A1 |
| Гидроциклон | 1989 |
|
SU1720716A1 |
| Способ автоматического управления процессом флотации | 1986 |
|
SU1313513A1 |
| Способ автоматического управления измельчительно-флотационным циклом | 1983 |
|
SU1093352A1 |
