Изобретение относится к области обогащения полезных ископаемых и может быть использовано в горной, металлургической и других отраслях промышленности.
Известен способ автоматического управления флотационной машиной, включающий измерение контролируемого параметра (уровня пульпы), сравнение его текущего значения с заданным и отбор пульпы из двух зон путем измерения положения песковой заслонки и положения сливной заслонки в зависимости от положения песковой [1].
Известно также устройство для автоматического управления флотационной машиной, включающее датчик уровня, соединенный через регулятор с задатчиком, и исполнительный механизм, соединенный с приспособлением для перекрытия пескового и сливного патрубков (песковая заслонка и сливная) [1].
Недостатками известных способа и устройства автоматического управления флотационной машиной является невозможность его применения в импеллерных флотационных машинах. Кроме того, при колебаниях состава перерабатываемой руды в камере флотационной машины будет изменяться гранулометрический состав и плотность пульпы, в частности, могут накапливаться крупные классы материала, которые нельзя своевременно вывести при регулировании флотационной машиной только по уровню пульпы. В импеллерных флотационных машинах с высокой камерой по высоте камеры происходит расслоение пульпы, разделение ее по плотности по высоте камеры. Самая высокая плотность пульпы наблюдается в донной части машины, в песковом слое, по высоте камеры плотность снижается, при этом различие в плотности пульпы в нижней и верхней частях камеры зависит от состава руды, ее флотируемости и измельчаемости. Неравномерность плотности пульпы с высокой камерой обусловлена в основном двумя факторами: добавлением в пульпу реагентов, применяемых во флотационных машинах, для расслоения и осаждения.
Неравномерность плотности пульпы по высоте камеры может быть обусловлена также различием минералов по крупности и удельному весу, мелкие, более легкие частицы стремятся подняться в верхние слои камеры, тогда как более крупные и тяжелые частицы стремятся опуститься вниз, в донную часть камеры. При этом, если во флотационных машинах с низкими камерами перемешивания и гидродинамики достаточно для поддержания одинаковой плотности по высоте камеры, то в машинах с высокими камерами этих процессов недостаточно для обеспечения одинаковой плотности по высоте камеры, происходит расслоение пульпы.
Неравномерность плотности пульпы по высоте камеры приводит к нестабильной работе флотационной машины и снижению эффективности ее работы из-за того, что при повышении плотности пульпы в зоне диспергации и основного перемешивания выше необходимой для нормальной работы импеллера нагрузка на импеллер увеличивается, что приводит к быстрому износу импеллера, а иногда и к его поломкам. Кроме того, при скоплении частиц материала в донной части камеры ухудшается придонная циркуляция, возможна забивка крупными частицами пространства между корпусом и нижней частью статора импеллера, что ухудшает диспергирование воздуха в нижней части флотационной машины и, как следствие, нарушает создание устойчивых потоков пульпы, что снижает эффективность флотации.
Предлагаемый способ автоматического регулирования флотационной машиной и устройство для автоматического управления флотационной машиной решают задачу повышения эффективности импеллерной флотационной машины и увеличение срока ее службы.
Это достигается тем, что в способе автоматического управления флотационной машиной, включающем измерение контролируемого параметра, сравнение его текущего значения с заданным и отбор пульпы из двух зон, осуществляемый в зависимости от величины рассогласования между заданным и текущим значениями контролируемого параметра, согласно изобретению, в качестве контролируемого параметра используют плотность пульпы в зоне диспергации и основного перемешивания в непосредственной близости от импеллера, при этом поддерживают плотность пульпы с возможностью отклонения ее в пределах ± 10% от заданной, причем при снижении плотности от заданного значения более, чем на 10% производят забор пульпы из зоны с низкой плотностью, расположенной в зоне минерализации, при превышении плотности от заданного значения более, чем на 10%, забор пульпы производят из песковой зоны, а при повышении плотности пульпы от заданного значения более, чем на 15% производят дополнительную подачу воздуха в зону диспергации и основного перемешивания.
Это достигается также тем, что в устройстве для автоматического управления флотационной машиной, включающее датчик и задатчик контролируемого параметра, подключенные к входам регулятора, два выхода которого подключены к исполнительным механизмам приспособления для поочередного перекрытия пескового и сливного отверстий, согласно изобретению оно дополнительно снабжено подключенным к третьему выходу регулятора приспособлением для регулирования подачи воздуха в зону диспергации и основного перемешивания и соединенным с ним исполнительным механизмом, датчик контролируемого параметра представляет собой датчик плотности, устанавленный в зоне диспергации и основного перемешивания в непосредственной близости от импеллера, а сливное отверстие расположено над импеллером.
Способ автоматического управления флотационной машиной заключается в следующем.
При переработке более твердой или труднофлотируемой руды во флотационной машине происходит накопление крупных классов перерабатываемого, что соответственно приводит к повышению плотности пульпы. При этом в высоких камерах происходит расслоение плотностей по высоте камеры. Чем выше расположена зона, тем меньше в ней плотность пульпы. Наиболее высокая плотность пульпы в нижней части камеры (песковая зона).
Следует отметить, что в импеллерных флотационных машинах имеется зона диспергации и основного перемешивания, включающая объем пульпы, непосредственно прилегающий к импеллеру, и ограниченная высотой, обусловленной восходящими и нисходящими циркулирующими потоками, имеющими ограниченный характер. Эта зона расположена над песковой зоной. При этом размеры зоны диспергации и основного перемешивания, определенные для каждой конкретной флотационной машины, обусловлены объемом и высотой камеры, скоростью вращения импеллера и составом перемешиваемой руды.
Выше верхней границы зоны основного перемешивания расположены относительно спокойная зона минерализации, перечистки, подпенный слой и слой пенной перечистки. Размеры этих зон так же определенны для каждой флотационной машины. Разделение пульпы по плотности приводит к нестабильной работе флотационной машины. При этом для импеллерных флотационных машин с высокими камерами основным условием стабильности их работы является поддержание заданной плотности пульпы в зоне, непосредственно прилегающей к импеллеру, то есть в зоне диспергации и основного перемешивания, поскольку повышение плотности выше заданной (выбор заданной плотности строго индивидуален для каждой машины и для каждого вида перерабатываемой руды и обусловлен оптимальными условиями работы импеллера) приводит к быстрому износу импеллера и его поломке. Снижение плотности в зоне расположения импеллера приводит к снижению эффективности процесса флотации. Допустимое отклонение от заданной величины составляет ±10%.
При изменении плотности пульпы в зоне диспергации и основного перемешивания в зависимости от величины отклонения фактической плотности от заданной автоматически производится отбор пульпы из одной из двух зон - зоны минерализации с низкой плотностью пульпы или песковой зоны, расположенной в донной части камеры, с высокой плотностью пульпы. Отбор пульпы производится до тех пор, пока фактическое значение плотности пульпы в зоне диспергации и основного перемешивания не достигнет заданного значения. При этом при снижении плотности от заданной более чем на 10% автоматически производится отбор пульпы из песковой зоны. А при повышении плотности от заданной более чем на 10% отбор пульпы автоматически осуществляется из песковой зоны и прекращается отбор пульпы из зоны минерализации.
Однако при значительном увеличении плотности пульпы, подаваемой во флотационную машину, становится невозможным поддержание стабильной плотности пульпы в зоне диспергации и основного перемешивания только за счет отбора пульпы из песковой зоны флотационной машины. Учитывая, что при повышении плотности пульпы увеличивается количество твердых частиц, которые нужно зацепить пузырьками воздуха, для стабилизации процесса флотации производят дополнительную его подачу в зону диспергации и основного перемешивания, пока фактическое значение плотности пульпы в зоне диспергации и основного перемешивания не достигает заданного значения.
Следует отметить, что дополнительную подачу воздуха можно осуществлять как при осуществлении отбора пульпы из песковой зоны, так и самостоятельно, без отбора пульпы с высокой плотностью из песковой зоны. Это определяется требованиями, предъявляемыми к конкретному процессу флотации.
На чертеже приведена блок-схема устройства для автоматического управления флотационной машиной.
Устройство содержит датчик 1 плотности, расположенный в зоне 2 диспергации и основного перемешивания в непосредственной близости от импеллера 3 флотационной машины 4 с высокой камерой 5. Сливное отверстие 6 расположено над импеллером 3 в зоне минерализации 7. В нижней части камеры 5 выполнено песковое отверстие 8. Устройство снабжено регулятором 9, при этом датчик 1 и задатчик 10 подключены к входам регулятора 9, два выхода которого подключены к исполнительным механизмам 11 и 12, соединенным с приспособлениями 13 и 14 для поочередного перекрытия пескового 8 и сливного 6 отверстий, исполнительный механизм 15 соединен с приспособлением 16 для регулирования подачи воздуха в зону диспергации и основного перемешивания. Приспособление 16 соединено с третьим выходом регулятора 9.
Приспособление 15 может быть связано с каналом для подачи воздуха в полый вал 16 или с отдельным каналом для дополнительной подачи воздуха ( на чертеже каналы не показаны).
Устройство работает следующим образом.
При изменении плотности пульпы в зоне 2 диспергации и основного перемешивания сигнал с датчика 1 плотности, расположенного в непосредственной близости от импеллера 3, поступает в регулятор 9, где сравнивается с сигналом задатчика 10.
Выходной сигнал с регулятора 9 поступает на исполнительный механизм 11, связанный с шибером 13 пескового отверстия 8. Сигнал с задатчика 10 поступает также на управление исполнительным механизмом 12, связанным с шибером 14 сливного отверстия 6. При увеличении плотности пульпы в зоне 2 от заданной более чем на 10% шибер 13 поднимает с помощью исполнительного механизма 11, открывая песковое отверстие 8. При этом одновременно с изменением положения шибера 13 от того же сигнала производится изменение положения шибера 14 сливного отверстия в сторону его перекрытия. Производится отбор пульпы из придонной части камеры 5 с высокой плотностью пульпы до тех пор, пока плотность пульпы в зоне 2 диспергации и основного перемешивания не достигнет заданного значения и с датчика 1 плотности не поступит сигнал на перекрытие шибером 13 пескового отверстия 8. При увеличении плотности пульпы в зоне 2 более чем на 15 % от заданной выходной сигнал с регулятора 9 поступает на исполнительный механизм 15 приспособления 16 для регулирования подачи воздуха в зону диспергации и основного перемешивания.
При снижении плотности пульпы от заданного более чем на 10 % последовательность операций в способе изменяется в обратном порядке. Производится отбор пульпы из зоны 7 минерализации с низкой плотностью пульпы. Эта зона расположена выше импеллера, над зоной 2 диспергации и основного перемешивания и имеет более низкую плотность, чем зона 2. Поэтому, производя отбор пульпы из этой зоны, можно стабилизировать плотность пульпы в зоне 2 за счет ее увеличения и достижения заданной величины. При снижении плотности пульпы в зоне 2 с датчика 1 плотности поступает в регулятор 9, где сравнивается с сигналом задатчика 10. Выходной сигнал с регулятора 9 поступает на исполнительные механизмы 11 и 12, связанные с шиберами 13 и 14. При этом шибер 14 поднимается, открывая сливное отверстие 6, через которое производится отбор пульпы из зоны минерализации 7, песковое отверстие 8 перекрывается шибером 13. Отбор пульпы из зоны минерализации 7 с низкой плотностью пульпы производится до тех пор, пока плотность пульпы, прилегающей к импеллеру 3 в зоне 2, не достигнет заданного значения, позволяющего обеспечить стабильную работу флотационной машины с оптимальными условиями работы импеллера, предотвращающими его преждевременный износ и поломки.
Предложенный способ и устройство для автоматического управления флотационной машиной позволяют управлять процессом флотации, обеспечивая стабильное поддержание плотности пульпы в зоне диспергации и основного перемешивания (нормальная плотность 35 %), что обеспечивает стабилизацию процесса флотации, повышает эффективность работы флотационной машины и увеличивает срок службы машины даже при большой плотности, поступающей в машину пульпы (например, 70 % твердых частиц).
Следует отметить, что в многокамерных флотационных машинах в каждой камере протекают одни и те же процессы, идентичные описанным нами для одной камеры.
Все вышеперечисленное обеспечивает повышение эффективности работы импеллерных флотационных машин с высоким объемом камеры, а также позволяет обеспечить бесперебойную работу флотационных машин на протяжении всего срока эксплуатации даже при плотности пульпы, поступающей в машину, намного большей, чем заданная.
Способ и устройство автоматического управления флотационной машиной проходили испытания в течение трех лет. Испытания подтвердили все вышеперечисленные преимущества предложенных способа и устройства автоматического управления флотационной машиной.
Заявляемые технические решения полностью решают поставленные задачи.
Заявляемые способ и устройство на настоящее время в РФ и за границей не известны и отвечают требованиям критерия "новизна".
Заявляемые способ и устройство являются оригинальными, не вытекают очевидным образом из существующего уровня техники и отвечают требованиям критерия "изобретательский уровень".
Заявляемые способ и устройство могут быть реализованы с помощью известных технических средств, технологий и материалов и отвечают требованиям критерия "промышленная применимость".
Источник информации
1. SU авт. св. 956024, кл. B 03 D 1/00, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ФЛОТАЦИОННОЙ МАШИНОЙ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ФЛОТАЦИОННОЙ МАШИНОЙ | 2000 |
|
RU2165302C2 |
| СПОСОБ ФЛОТАЦИИ РУД | 2001 |
|
RU2177371C1 |
| СПОСОБ ФЛОТАЦИИ РУД И УСТРОЙСТВО ДЛЯ ФЛОТАЦИИ РУД | 2001 |
|
RU2177370C1 |
| ФЛОТАЦИОННАЯ МАШИНА ДЛЯ ФЛОТАЦИИ КРУПНЫХ ЧАСТИЦ | 2002 |
|
RU2213624C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2000 |
|
RU2170145C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2002 |
|
RU2212950C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2002 |
|
RU2207918C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2012 |
|
RU2482897C1 |
| ЛАБОРАТОРНАЯ ФЛОТАЦИОННАЯ МАШИНА | 2016 |
|
RU2636074C1 |
| МЕХАНИЧЕСКАЯ ФЛОТАЦИОННАЯ МАШИНА | 2003 |
|
RU2245743C1 |
Изобретение относится к области обогащения полезных ископаемых и может быть использовано в горной, металлургической и других отраслях промышленности. Техническим результатом изобретения является эффективность флотационной машины и увеличение срока ее службы. Для этого способ включает измерение контролируемого параметра (КП), сравнение его текущего значения с заданным и отбор пульпы из двух зон, осуществляемый в зависимости от величины рассогласования между заданным и текущим значениями КП. В качестве КП используют плотность пульпы (ПП) в зоне диспергации и основного перемешивания в непосредственной близости от импеллера. При этом поддерживают ПП с возможностью отклонения ее в пределах ±10 % от заданной. Причем при снижении ПП от заданного значения более чем на 10 % производят забор пульпы из зоны с низкой ПП, расположенной в зоне минерализации, при превышении ПП от заданного значения более чем на ±10 % забор пульпы производят из песковой зоны, а при повышении ПП от заданного значения более чем на 15 % производят дополнительную подачу воздуха в зону диспергации и основного перемешивания. Устройство для реализации способа включает датчик и задатчик КП, подключенные ко входам регулятора, два выхода которого подключены к исполнительным механизмам приспособления для поочередного перекрытия пескового и сливного отверстий. К третьему выходу регулятора подключено приспособление для регулирования подачи воздуха в зону диспергации и основного перемешивания, с которым соединен исполнительный механизм. Датчик КП представляет собой датчик ПП, установленный в зоне диспергации и основного перемешивания в непосредственной близости от импеллера. Сливное отверстие расположено над импеллером. 2 с.п. ф-лы, 1 ил.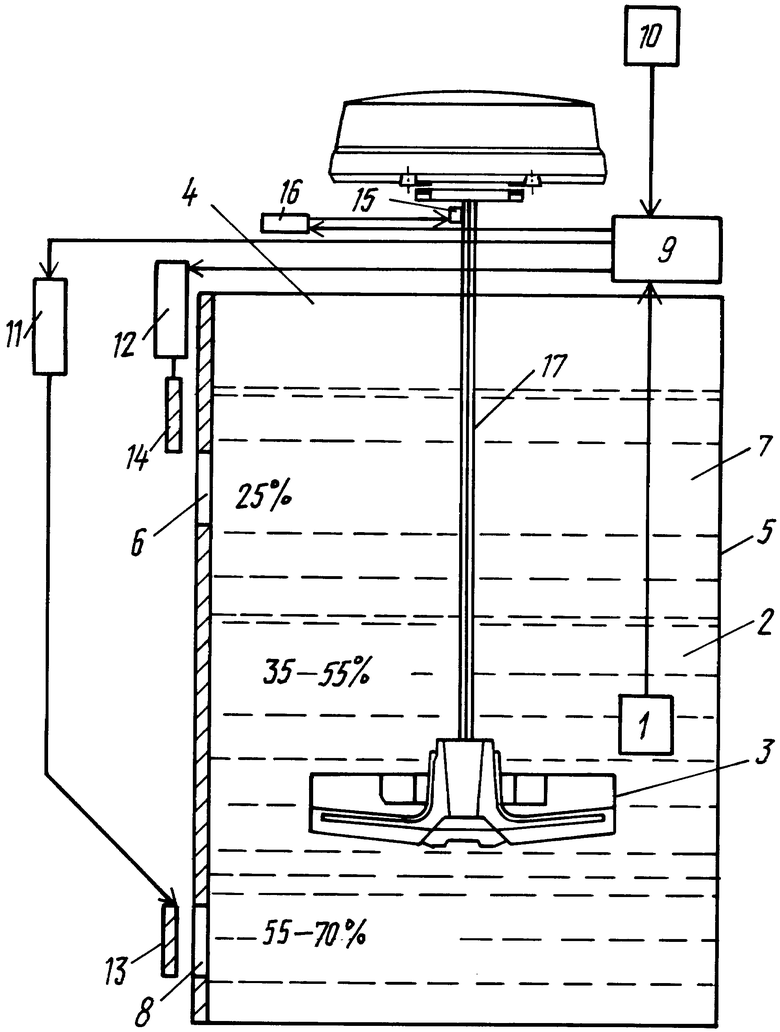
| Способ автоматического управления флотационной машиной | 1981 |
|
SU956024A1 |
| Способ стабилизации уровня пульпы в прямоточных флотомашинах | 1976 |
|
SU692631A1 |
| Способ управления процессом флотации | 1985 |
|
SU1343606A1 |
| Способ автоматического управления процессом флотации | 1988 |
|
SU1567274A1 |
| Способ управления процессом флотации | 1982 |
|
SU1045937A1 |
| Способ управления процессом флотации | 1987 |
|
SU1685528A1 |
| Способ управления процессом флотации | 1990 |
|
SU1722595A1 |
| Устройство для автоматического управления процессом флотации | 1989 |
|
SU1740074A1 |
| Устройство для управления процессом флотации в пневматической колонной флотационной машине | 1990 |
|
SU1750734A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА ПЕННОЙ ФЛОТАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2011420C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ОБОГАЩЕНИЯ ПЕННОЙ ФЛОТАЦИЕЙ | 1990 |
|
RU2011422C1 |
| СПОСОБ ПРОИЗВОДСТВА МЯСОРАСТИТЕЛЬНЫХ КОНСЕРВОВ | 2000 |
|
RU2180779C1 |
| DE 3432218 А, 28.03.1985 | |||
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2374090C1 |
| ГУДИМА В.И | |||
| Основы автоматизации обогатительных фабрик | |||
| - М.: Недра, 1979, с.190-197. | |||
