Изобретение относится к области обогащения полезных ископаемых и может быть использовано в горной, металлургической и других отраслях промышленности.
Известен способ автоматического управления флотационной машиной, заключающийся в измерении уровня пульпы, изменении положения песковой заслонки, установленной на выпускном отверстии флотационной машины и изменении положения сливной заслонки в зависимости от положения песковой по уровню пульпы (1).
Нарушения, вызываемые колебанием состава руды, не могут быть устранены в силу самого принципа управления - стабилизация только уровня пульпы.
Таким образом, при известном способе колебания крупности и плотности пульпы, связанные с колебанием состава руды по флотируемости и измельчаемости, будут оказывать существенное влияние на гидродинамику работы флотационной машины из-за несоответствия сечения пескового выпускного отверстия характеристикам перерабатываемого материала.
Известен способ автоматического управления флотационной машиной, включающий измерение контролируемого параметра (уровня пульпы), сравнение его текущего значения с заданным и отбор пульпы из двух зон путем изменения положения песковой заслонки и положения сливной заслонки в зависимости от положения песковой (2).
Известно также устройство для автоматического управления флотационной машиной, включающее датчик уровня, соединенный через регулятор с задатчиком, и исполнительный механизм, соединенный с приспособлением для перекрытия пескового и сливного патрубков (песковая заслонка и сливная) (2).
Недостатком известных способа и устройства автоматического управления флотационной машиной является невозможность его применения в импеллерных флотационных машинах. Кроме того, при колебаниях состава перерабатываемой руды в камере флотационной машины будут изменяться гранулометрический состав и плотность пульпы, в частности, могут накапливаться крупные классы материала, которые нельзя своевременно вывести при регулировании флотационной машиной только по уровню пульпы. В импеллерных флотационных машинах с высокой камерой по высоте камеры происходит расслоение пульпы, разделение ее по плотности по высоте камеры. Самая высокая плотность пульпы наблюдается в донной части машины, в песковом слое, по высоте камеры плотность снижается, при этом различие в плотности пульпы в нижней и верхней частях камеры зависит от состава руды, ее флотируемости и измельчаемости. Неравномерность плотности пульпы с высокой камерой обусловлена добавлением в пульпу реагентов, применяемых во флотационных машинах, для расслоения и осаждения.
В качестве реагентов могут быть использованы известь, жидкое стекло и т. д. в зависимости от того, какой основной минерал участвует в процессе флотации.
Неравномерность плотности пульпы по высоте камеры может быть обусловлена также различием минералов по крупности и удельному весу; мелкие, более легкие частицы стремятся подняться в верхние слои камеры, тогда как более крупные и тяжелые частицы стремятся опуститься вниз, в донную часть камеры. При этом если во флотационных машинах с низкими камерами перемешивания и гидродинамики достаточно для поддержания одинаковой плотности по высоте камеры, то в машинах с высокими камерами этих процессов недостаточно для обеспечения одинаковой плотности по высоте камеры, происходит расслоение пульпы.
Плотность пульпы в различных по высоте слоях отображена на чертеже. Неравномерность плотности пульпы по высоте камеры приводит к нестабильной работе флотационной машины и снижению эффективности ее работы из-за того, что при повышении плотности пульпы в зоне диспергации и основного перемешивания выше необходимой для нормальной работы импеллера нагрузка на импеллер увеличивается, что приводит к быстрому износу импеллера, а иногда и к его поломкам. Кроме того, при скоплении частиц материала в донной части камеры ухудшается придонная циркуляция, возможна забивка крупными частицами пространства между корпусом и нижней частью статора импеллера, что ухудшает диспергирование воздуха в нижней части флотационной машины и как следствие нарушает создание устойчивых потоков пульпы, что снижает эффективность флотации.
Предлагаемые способ автоматического регулирования флотационной машиной и устройство для автоматического управления флотационной машиной решают задачу повышения эффективности работы импеллерной флотационной машины с высокой камерой и увеличение срока ее службы путем предотвращения износа импеллера.
Это достигается тем, что в способе автоматического управления флотационной машиной, включающем измерение контролируемого параметра, сравнение его текущего значения с заданным и отбор пульпы из двух зон, осуществляемый в зависимости от величины рассогласования между заданным и текущим значением контролируемого параметра, согласно изобретению в качестве контролируемого параметра используют плотность пульпы в зоне диспергации и основного перемешивания, поддерживают плотность пульпы с возможностью отклонения в пределах ± 10% от заданной путем измерения плотности пульпы в зоне диспергации и основного перемешивания в непосредственной близости от импеллера и сравнения полученных значений с заданными, при этом при снижении плотности пульпы от заданной более чем на 10% производят отбор пульпы из зоны с низкой плотностью, расположенной в зоне минерализации, а при повышении плотности от заданной более чем на 10% отбор пульпы производят из песковой зоны.
Это достигается также тем, что в устройстве для автоматического управления флотационной машиной, включающем датчик контролируемого параметра, соединенный через регулятор с задатчиком, и исполнительный механизм с приспособлением для поочередного перекрытия пескового и сливного, согласно изобретению датчик контролируемого параметра представляет собой датчик плотности, установленный в зоне диспергации и основного перемешивания в непосредственной близости от импеллера, а сливное отверстие расположено над импеллером, при этом расстояние между нижним песковым отверстием и верхним сливным отверстием составляет не менее высоты или диаметра пескового отверстия.
Способ автоматического управления флотационной машиной заключается в следующем.
При переработке более твердой или труднофлотируемой руды во флотационной машине происходит накопление крупных классов перерабатываемого материала, что соответственно приводит к повышению плотности пульпы. При этом в высоких камерах происходит расслоение плотностей по высоте камеры. Чем выше расположена зона, тем меньше в ней плотность пульпы. Наиболее высокая плотность пульпы в нижней части камеры (песковая зона).
Следует отметить, что в импеллерных флотационных машинах имеется зона диспергации и основного перемешивания, включающая объем пульпы, непосредственно прилегающий к импеллеру и ограниченная высотой, обусловленной восходящими и нисходящими циркулирующими потоками, имеющими ограниченный характер. Эта зона расположена над песковой зоной. При этом размеры зоны диспергации и основного перемешивания определенные для каждой конкретной флотационной машины и обусловлены объемом и высотой камеры, скоростью вращения импеллера и составом перемешиваемой руды.
Выше верхней границы зоны основного перемешивания расположены относительно спокойная зона минерализации, перечистки, подпенный слой и слой пенной перечистки. Размеры этих зон также определенные для каждой флотационной машины. Разделение пульпы по плотности приводит к нестабильной работе флотационной машины. При этом для импеллерных флотационных машин с высокими камерами основным условием стабильности их работы является поддержание заданной плотности пульпы в зоне, непосредственно прилегающей к импеллеру, то есть в зоне диспергации и основного перемешивания, поскольку повышение плотности выше заданной (выбор заданной плотности строго индивидуален для каждой машины и для каждого вида перерабатываемой руды и обусловлен оптимальными условиями работы импеллера) приводит к быстрому износу импеллера и его поломке. Снижение плотности в зоне расположения импеллера приводит к снижению эффективности процесса флотации. Допустимое отклонение от заданной величины составляет ± 10%.
При изменении плотности пульпы в зоне диспергации и основного перемешивания, в зависимости от величины отклонения фактической плотности от заданной, автоматически производится отбор пульпы из одной из двух зон - зоны минерализации с низкой плотностью пульпы или песковой зоны, расположенной в донной части камеры, с высокой плотностью пульпы. Отбор пульпы производится до тех пор, пока фактическое значение плотности пульпы в зоне диспергации и основного перемешивания не достигнет заданного значения. При этом при снижении плотности от заданной более чем на 10% автоматически производится отбор пульпы из зоны минерализации и прекращается отбор пульпы из песковой зоны. А при повышении плотности от заданной более чем на 10% отбор пульпы автоматически осуществляется из песковой зоны и прекращается отбор пульпы из зоны минерализации.
На чертеже приведена блок-схема устройства для автоматического управления флотационной машиной.
Устройство содержит датчик 1 плотности, расположенный в зоне 2 диспергации и основного перемешивания в непосредственной близости от импеллера 3 флотационной машины 4 с высокой камерой 5. Сливное отверстие 6 расположено над импеллером 3 в зоне минерализации 7. В нижней части камеры 5 выполнено песковое отверстие 8. Датчик плотности 1 соединен через регулятор 9 и задатчик 10 с исполнительными механизмами 11 и 12, связанными с приспособлениями 13 и 14 для поочередного перекрытия пескового 8 и сливного 6 отверстий.
Приспособление может быть выполнено в виде шиберов 13 и 14 или пробок (на чертеже не показано).
Устройство работает следующим образом.
При изменении плотности пульпы в зоне 2 диспергации и основного перемешивания сигнал с датчика 1 плотности, расположенного в непосредственной близости от импеллера 3 поступает в регулятор 9, где сравнивается с сигналом задатчика 10.
Выходной сигнал с регулятора 9 поступает на исполнительный механизм 11, связанный с шибером 13 пескового отверстия 8. Сигнал с задатчика 10 поступает также на управление исполнительным механизмом 12, связанным с шибером 14 сливного отверстия 6. При увеличении плотности пульпы в зоне 2 от заданной более чем на 10% шибер 13 поднимает с помощью исполнительного механизма 11, открывая песковое отверстие 8. При этом одновременно с изменением положения шибера 13 от того же сигнала производится изменение положения шибера 14 сливного отверстия в сторону его перекрытия. Производится отбор пульпы из придонной части камеры 5 с высокой плотностью пульпы до тех пор, пока плотность пульпы в зоне 2 диспергации и основного перемешивания не достигнет заданного значения и с датчика 1 плотности не поступит сигнал на перекрытие шибером 13 пескового отверстия 8.
При снижении плотности пульпы от заданного более чем на 10% последовательность операций в способе изменяется в обратном порядке. Производится отбор пульпы из зоны 7 минерализации с низкой плотностью пульпы. Эта зона расположена выше импеллера, над зоной 2 диспергации и основного перемешивания и имеет более низкую плотность, чем зона 2. Поэтому, производя отбор пульпы из этой зоны, можно стабилизировать плотность пульпы в зоне 2 за счет ее увеличения и достижения заданной величины. При снижении плотности пульпы в зоне 2 сигнал с датчика 1 плотности поступает в регулятор 9, где сравнивается с сигналом задатчика 10. Выходной сигнал с регулятора 9 поступает на исполнительные механизмы 11 и 12, связанные с шиберами 13 и 14. При этом шибер 14 поднимается, открывая сливное отверстие 6, через которое производится отбор пульпы из зоны минерализации 7, песковое отверстие 8 перекрывается шибером 13. Отбор пульпы из зоны минерализации 7 с низкой плотностью пульпы производится до тех пор, пока плотность пульпы, прилегающей к импеллеру 3 в зоне 2, не достигнет заданного значения, позволяющего обеспечить стабильную работу флотационной машины с оптимальными условиями работы импеллера, предотвращающими его преждевременный износ и поломки.
Выбор расстояния между нижним песковым отверстием и верхним сливным отверстием, составляющим не менее высоты или диаметра пескового отверстия, обусловлен конфигурацией пескового отверстия (круглое, квадратное, прямоугольное) и вытекает из условия обеспечения высокой эффективности работы импеллерной флотационной машины с высокой камерой.
Следует отметить, что в многокамерных флотационных машинах в каждой камере протекают одни и те же процессы, идентичные описанным нами для одной камеры.
Все выше перечисленное обеспечивает повышение эффективности работы импеллерных флотационных машин с высокими камерами, а также позволяет обеспечить бесперебойную работу флотационных машин на протяжении всего срока эксплуатации.
Способ и устройство автоматического управления флотационной машиной проходили испытания в течение трех лет. Испытания подтвердили все вышеперечисленные преимущества предложенных способа и устройства автоматического управления флотационной машиной.
Заявляемые технические решения полностью решают поставленные задачи.
Заявляемые способ и устройство на настоящее время в РФ и за границей не известны и отвечают требованиям критерия "новизна".
Заявляемые способ и устройство являются оригинальными, не вытекают очевидным образом из существующего уровня техники и отвечают требованиям критерия "изобретательский уровень".
Заявляемые способ и устройство могут быть реализованы с помощью известных технических средств, технологий и материалов и отвечают требованиям критерия "промышленная применимость".
Список литературы
1. Авторское свидетельство SU N692631, кл. B 03 D 1/00, 1976 г.
2. Авторское свидетельство SU N956024, кл. B 03 D 1/00, 1981 г., прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ФЛОТАЦИОННОЙ МАШИНОЙ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ФЛОТАЦИОННОЙ МАШИНОЙ | 2001 |
|
RU2179891C1 |
| СПОСОБ ФЛОТАЦИИ РУД | 2001 |
|
RU2177371C1 |
| СПОСОБ ФЛОТАЦИИ РУД И УСТРОЙСТВО ДЛЯ ФЛОТАЦИИ РУД | 2001 |
|
RU2177370C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2000 |
|
RU2170145C1 |
| ФЛОТАЦИОННАЯ МАШИНА ДЛЯ ФЛОТАЦИИ КРУПНЫХ ЧАСТИЦ | 2002 |
|
RU2213624C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2002 |
|
RU2212950C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2002 |
|
RU2207918C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2012 |
|
RU2482897C1 |
| ГИДРОЦИКЛОН | 2000 |
|
RU2172214C1 |
| ЛАБОРАТОРНАЯ ФЛОТАЦИОННАЯ МАШИНА | 2016 |
|
RU2636074C1 |
Изобретение относится к обогащению полезных ископаемых и может быть использовано в горной, металлургической и др. отраслях промышленности. Техническим результатом является повышение эффективности работы машины и увеличение срока ее службы путем предотвращения износа импеллера. Для этого измеряют плотность пульпы, сравнивают ее текущее значение с заданным. При этом измеряют плотность пульпы датчиком, установленным в зоне диспергации и основного перемешивания, в непосредственной близости от импеллера. При снижении плотности пульпы от заданного значения более чем на 10% производят забор пульпы из зоны с низкой плотностью, расположенной в зоне минерализации. При повышении плотности от заданного значения более чем на 10% забор пульпы производят из песковой зоны. Для чего сигнал с датчика через регулятор с задатчиком подается на исполнительный механизм для поочередного перекрытия нижнего пескового и верхнего сливного отверстий, расстояние между которыми составляет не менее высоты или диаметра пескового отверстия. При этом сливное отверстие расположено над импеллером. 2 с.п. ф-лы, 1 ил.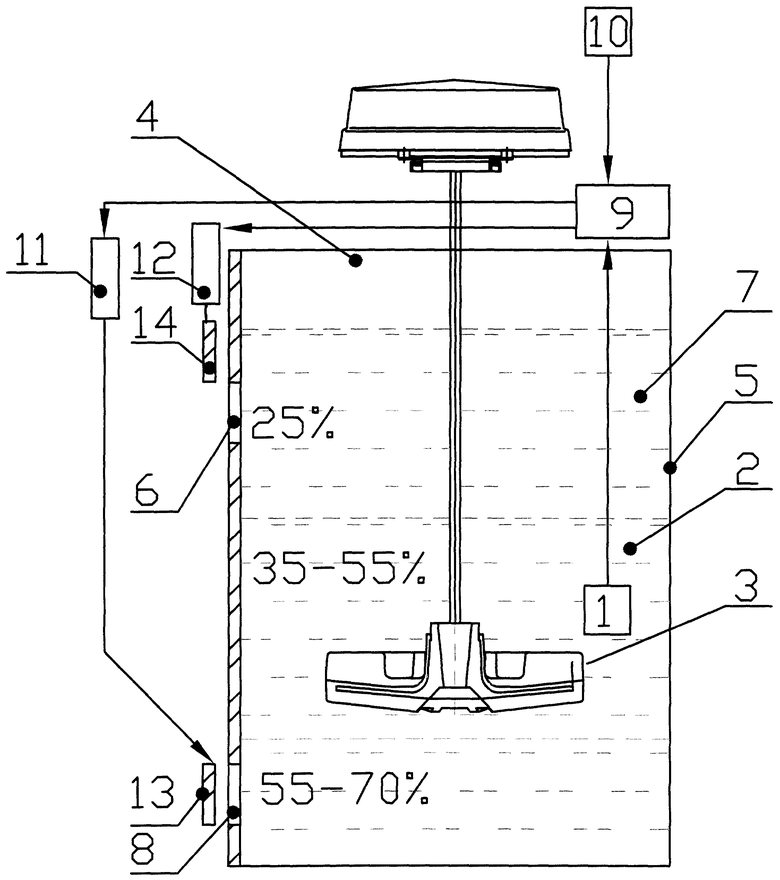
| Способ автоматического управления флотационной машиной | 1981 |
|
SU956024A1 |
| Способ управления процессом флотации | 1982 |
|
SU1045937A1 |
| Способ автоматического регулирования процесса пенной сепарации | 1972 |
|
SU484011A1 |
| Способ регулирования процесса флотации | 1974 |
|
SU518232A1 |
| Способ стабилизации уровня пульпы в прямоточных флотомашинах | 1976 |
|
SU692631A1 |
| Устройство управления процессом флотации в колонной пневматической машине | 1985 |
|
SU1314509A1 |
| Способ управления процессом флотации | 1987 |
|
SU1461510A1 |
| US 5236089 A, 17.08.1993 | |||
| ГУДИМА В.И | |||
| Основы автоматизации, обогатительных фабрик | |||
| - М.: Недра, 1979, с | |||
| Ускоритель для воздушных тормозов при экстренном торможении | 1921 |
|
SU190A1 |
