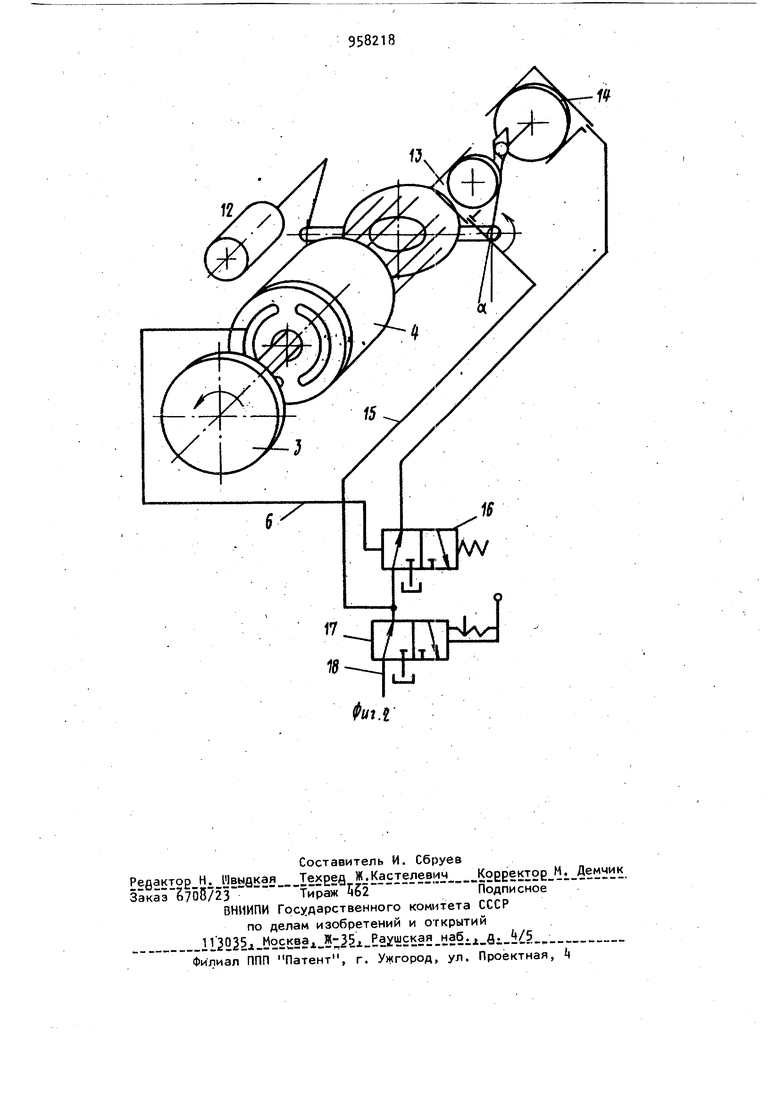
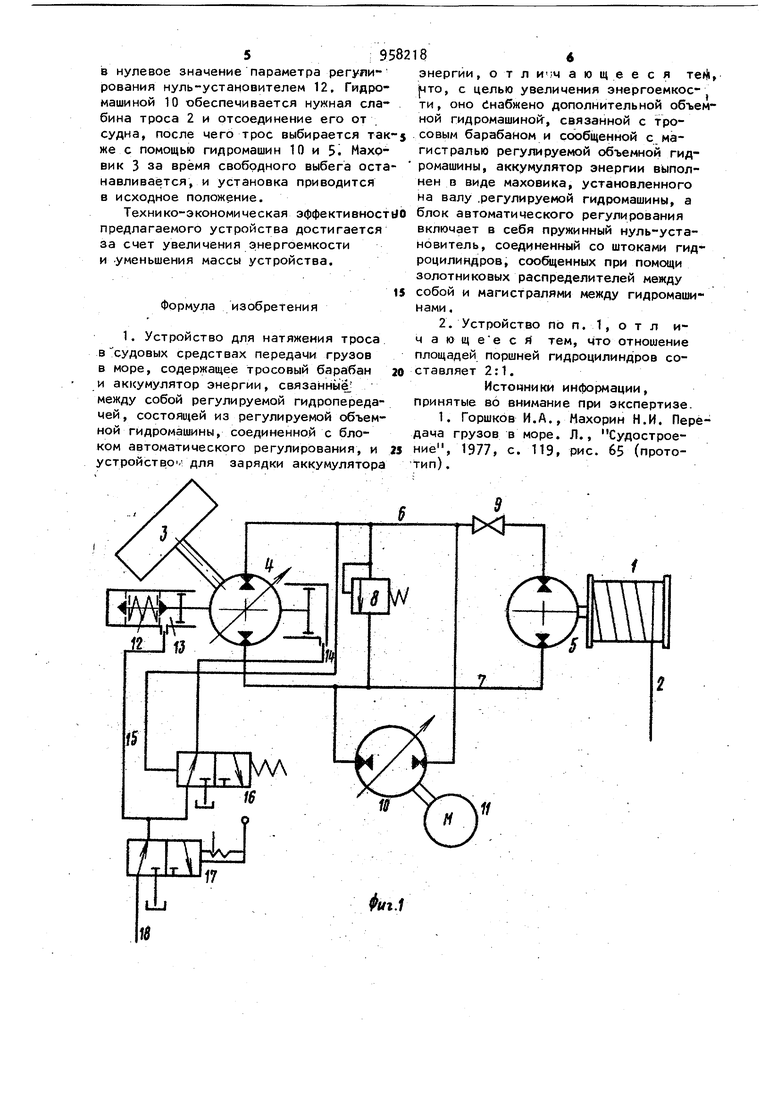
Изобретение относится к судостроению, в частности, к устройствам для натяжения троса в судовых средствам передачи грузов в море. Известно устройство для натяжения троса в судовых средствах передачи грузов в море, содержащее тросовый барабан и аккумулятор энергии, связё ные между собой регулируемой гидропе редачей, состоящей из регулируемой объемной гидромашины, соединенной с. блоком автоматического регулирования, и устройство для зарядки аккуму лятора энергии 1. Однако известное устройство для натяжения троса обладает недостаточной энергоемкостью. Цель изобретения - увеличение эне гоемкости устройства. Для этого устройство снабжено дополнительной объемной гидромашиной, связанной с тросовым барабаном и соо щенной с магистралью регулируемой об емной гидромашины, аккумулятор энергии выполнен в виде маховика, установленного на валу регулируемой гид- Ромашины, а блок автоматического ре-, гулирования включает в себя пружинный нуль-установитель, соединенный со штоками гидроциЛИНДров« сообщеннных При помощи золотниковых распределите- лей между собой и магистралями между гидромашинами. При этом отношение плсмцадей поршней гидроцилиндров составляет 2:1. На фиг. 1 показана принципиальная гидравлическая схема; на фиг. 2 принципиальная схема с системой автоматического регулирование. Устройство содержит тросовый барабан 1 с тросом 2 на нем. Тросовый барабан 1 посредством регулируемой гидропередачи соединен с аккумулятором, выполненным в виде маховика 3. Регулируемая гидропередачгГ включает регулируемую объемную гидромаимну , соединенную с маховиком 3 и нерегулируемую объемную гидромашину S, соединенную с тросрвым барабаном 1. Объемные гидромашины и 5 связаны между собой магистраля 6 и 7 между которыми установлен предохранитель ный клапан 8. В магистрали 6 установлен запорный кран 9. К магистралям 6 и 7 параллель но с регулируемой объемной гидромашиной подключено устройство для заряд ки-аккумулятора, содержащее другую объемную регулируемую гидромашину 10 -с приводом от электродвигателя 11. Объемная регулируемая гидромашина снабжена пружинным нуль-установитеЯем 12 и цилиндрами 13 и 1 управлейия. Площадь поршня цилиндра И вдвое больше поршня цилиндра 13. Ци линдры 13 и 14 соединены с магистралью 15, причем цилиндр 14 - посредством золотника 16 управления по давлению в магистрали 6. Золотник 1б управления в зависимости от давления в магистрали 6 соединяет цилиндр 14 с магистралью 15 или со сливом. Магистраль 15 через золотниковый распределитель .17 может соединяться с магистралью 18 управления или со сливом. Устройство работает следующим образом. В исходном положении маховик 3 неподвижен, трос 2 намотан на барабан 1 в магистрали 18 управления имеется давление, достаточное для управления. Золотниковый распределитель 17 соединяет магистраль 15 со сливом. Следова тельно гидромашина 4 выведена нульустановителем 12 в нулевое значение пара 4етра регулирования (d О, фиг.2 Запорный кран 9 закрыт. Гидромашина 10 установлена в нулевое значение параметра регулирования. Включением двигателя 11 приводится во вращение гидромашина 10. Регулированием этой гидромашины обеспечивается подача жидкости в магистраль 6, что приводит к повышению давления в этой магистрали, вплоть до срабатывания предохранительного клапана 8. Переключается золотниковый распределитель 17, соединяя магистрали 15 и 18. При этом (фиг. 2) гидромашина 4 выводится цилиндром 14 из нулевого значения параметра регулирования, поскольку давление в магистрали 8 в это момент прёвьщ|ает давление настройки золотника 16, и усилие цилиндра 14, преодолевая усилие цилиндра 13, поворачивает наклонную шайбу гидромашины 95 4 в направлении стрелки (отрицательные значения о1 ). Образовавшийся крутящий момент на валу гидромашины k начинает раскручивать маховик 3 в направлении стрелки. Гидромашина 10 выводится в наибольшее значение параметра регулирования. При этом посредством золотника 16 автоматически устанавливается параметр регулирования гидромашины 4, обеспечивающий поддержание заданного золотником 1б давления в магистрали 6. После раскрутки маховика 3 до нужной скорости золотниковый распределитель 17 переключается, соединяя магистраль 15 со сливом. Нульустановитель 12 выводит параметр рёгу лирования гидромашины 4 в нулевое . значение. Выводится вручную также в нулевое значение параметр регулирования гидромашины 10. После этого открывается запорный кран 9, и управлением гидромашины ТО производится стравли- ; вание троса 2 с барабана 1 для закрепления его на принимающем (передающем) судне. После закрепления троса вновь переключается золотниковый распределитель 17, подключая магистраль 15 к магистрали 1.8, и гидромашина 4 вводитсяв режим управления по давлению в магистрали 6, поддерживая его постоянным в соответствии с настройкой. Постоянство давления в магистрали 8 обеспечивает постоянство крутящего момента на барабане 1 и, следовательно, УСИЛЙ;Я натяжения троса 2 (без учета гидромеханического КПД гидромашины 5). В этом режиме слежения при расхождении судов и стравливании троса 2 гидромашина 5 работает в насос - режиме, нагнетая рабочую жидкость В магистраль 6. Гидромашина 4 работает при этом в моторном режиме, подкручивая маховик 3. При схождении судов и выбирании троса 2 гидромашины 4 и 5 меняют режимы работы, а маховик в этом полупериоде несколько теряет скорость вращения. В режиме слежения происходит потеря энергии в основном контуре маховик - барабан. Восполнение ее производится дополнительной подачей жидкости в магистраль 6 с помощью гидромашины 10с расходом, достаточным для поддержания средней скорости маховика 3 в определенных пределах. После завершения грузовых операций вновь переключается золотниковый распределитель 17, соединяя магистраль 15 со сливом, чем производится выведение гидромашины 4 в нулевое значение параметра регулирования нуль-установителем 12, Гидро машиной 10 обеспечивается нужная слабина троса 2 и отсоединение его от судна, после чего трос выбирается так же с помощью гидромашин 10 и 5. Маховик 3 за время свободного выбега оста навливается, и установка приводится в исходное положение. Технико-экономическая эффективност предлагаемого ycTpov icTBa достигается за счет увеличения энергоемкости и .уменьшения массы устройства. Формула изобретения 1. Устройство для натяжения троса в судовых средствах передачи грузов в море, содержащее тросовый барабан и аккумулятор энергии, связанные; между собой регулируемой гидропередачей , состоящей из регулируемой объемной гидромашины, соединенной с блоком автоматического регулирования, и устройством для зарядки аккумулятора энергии, о т л и;ч а ю щ е е с я тей jMTo, с целью увеличения энергоемкоети, оно Снабжено дополнительной объемной гидромашиной, связанной с тросовым барабаном и сообщенной с магистралью регулируемой объемной гидромашины, аккумулятор энергии выполнен в виде маховика, установленного на валу .регулируемой гидромашины, а блок автоматического регулирования включает в себя пружинный нуль-установитель, соединенный со штоками гидроцилиндров, сообщенных при помощи золотниковых распределителей между собой и магистралями между гидромашинами . 2. Устройство по п. 1, о т л ич а ю щ ее с я тем, что отношение площадей поршней гидроцилиндров составляет 2:1. Источники информации, принятые во внимание при экспертизе. 1. Горшков И.А., Нахорин Н.И. Передача грузов в море. Л., Судостроение, 1977, с. 119, рис. 65 (протоТип).
t2
wrr
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1987 |
|
SU1416373A2 |
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1986 |
|
SU1341095A2 |
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1985 |
|
SU1252237A2 |
| Тросонатяжное устройство | 1985 |
|
SU1255560A1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ КАНАТА В СУДОВЫХ СРЕДСТВАХ ПЕРЕДАЧИ ГРУЗОВ В МОРЕ (ВАРИАНТЫ) | 2014 |
|
RU2578636C1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС И ГИДРАВЛИЧЕСКАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА С АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 2000 |
|
RU2172428C1 |
| ГИДРООБЪЕМНАЯ ПЕРЕДАЧА | 2017 |
|
RU2651376C1 |
| Канатно-натяжное устройство для судового средства передачи грузов в море | 1985 |
|
SU1321629A1 |
| ГИДРОПРИВОД | 2004 |
|
RU2278310C1 |
| Гидравлическое устройство автоматической стабилизации нагрузки землеройной машины | 1979 |
|
SU861509A1 |