11341095
зобретение относится к судостроетесл 4 ну ва ро зн му
нию, в частности к устройствам натяжения несущего троса в судовых канатных дорогах, предназначенных для передачи грузов в море.
Цель изобретения - повышение надежности работы устройства для натяжения несущего троса при передаче груза в море.IQ
На чертеже изображена схема предлагаемого устройства.
Устройство содержит тросовый барабан 1 с тросом 2 на нем. Тросовый барабан. I посредством регулируемой 5 гидропередачи соединен с аккумулятором, выполненым в виде маховика 3. Регулируемая гидропередача включает регулируемую объемную гидромашину 4, соединенную с маховиком 3, и нерегу- 20 лируемую объемную машину 5, соединенную с тросовьм барабаном 1. Объемные гидромашины 4 и 5 связаны между собой магистралями 6 и 7, между которыми установлен предохранительный кла- 25 лан 8.
В магистрали 6 установлен напорный клапан 9. К магистралям 6 и 7 параллельно с регулируемой объемной гидромашиной 4 подключено устройство 30 для зарядки аккумулятора, содержащее объемную регулируемую гидромашину 10 с приводом от электродвигателя 11. Объемная гидромашина 4 снабжена пружинным нуль-установителем 12 и ци- 35 линдрами 13 и 14 управления. Площадь поршня цилиндра 14 вдвое больше площади цилиндра 13. Цилиндры 13 и 14 соединены с магистралью 15, причем цилиндр 14 посредством золотника 16 40 управления по давлению в магистрали 6. Золотник 16 управления в зависимости от давления в магистрали 6 соединяет цилиндр 14 с магистралью 15 или
тель 17 соединяет магистраль 15 со сливом. Следовательно, гидромащина 4 выведена нуль-установителем 12 в нулевое значение параметра регулирования.. Запорный клапан 9 закрыт. Гидромашина 10 установлена в нулевое значение параметра регулирования, муфта 20 разомкнута.
Включением двигателя 11 приводится во вращение гидромашина 10. Регулированием этой гидромашины обеспечивается подача жидкости в магистраль 6, что приводит к повышению давления в зтой магистрали вплоть до срабатывания предохранительно.го клапана 8. Переключается золотниковый распределитель 17, соединяя магистрали 15 и 18. При этом гидромащина 4 выводится цилиндром 14 из нулевого значения параметра регулирования, поскольку давление в магистрали 6 в этот момент превьш1ает первоначальное давление настройки золотника 16, и усилие цилиндра 14, преодолевая усилие цилиндра 13, поворачивает наклонную шайбу гидромашины 4. Образовав- шийся крутящий момент на валу гидромашины 4 начинает раскручивать маховик 3. Гидромащина 10 выводится в наибольшее значение параметра регулирования. При этом посредством золотника 16 автоматически устанавливается параметр регулирования гидромашины 4, обеспечивающий поддержание заданного золотником 16 давления в магистрали 6. После раскрутки маховика 3 до нужной скорости золотниковый распределитель 17 переключается, соединяя магистраль 15 со сливом. Нуль- установителем 12 параметр регулирования гидромашины 4 выводится в нулевое значение, Выво;цится вручнздо также в нулевое значение параметр регусо сливом. Магистраль 15 через золот-45 лирования гидромашины 10. После этого открывается запорный клапан 9 и управлением гидромашины 10 производится стравливание троса 2 с барабана 1 для закрепления его на принимающем судне. После закрепления . троса вновь переключается золотниковьй распределитель 17, подключая магистраль 15 к магистрали 18, и гидромашина 4 вводится в режим управления по давлению в магистрали 6. Включается муфта 20, соединяя кинематически барабан I через зубчатую передачу 19 с винтом 21, регулирующим величину поджатия пружины золотника
никовый распределитель 17 может соединяться с магистралью 18 управления или со сливом.
Барабан 1 через зубчатую передачу 19 и муфту 20 связан с винтом 21, регулирующим величину поджатия пружины золотника 16.
Устройство работает следующим образом.
В исходном положении маховик 3 неподвижен, трос 2 намотан на бара- бан 1, в магистрали 18 управления имеется давление, достаточное для управления. Золотниковый распределитель 17 соединяет магистраль 15 со сливом. Следовательно, гидромащина 4 выведена нуль-установителем 12 в нулевое значение параметра регулирования.. Запорный клапан 9 закрыт. Гидромашина 10 установлена в нулевое значение параметра регулирования, муфта 20 разомкнута.
Включением двигателя 11 приводится во вращение гидромашина 10. Регулированием этой гидромашины обеспечивается подача жидкости в магистраль 6, что приводит к повышению давления в зтой магистрали вплоть до срабатывания предохранительно.го клапана 8. Переключается золотниковый распределитель 17, соединяя магистрали 15 и 18. При этом гидромащина 4 выводится цилиндром 14 из нулевого значения параметра регулирования, поскольку давление в магистрали 6 в этот момент превьш1ает первоначальное давление настройки золотника 16, и усилие цилиндра 14, преодолевая усилие цилиндра 13, поворачивает наклонную шайбу гидромашины 4. Образовав- шийся крутящий момент на валу гидромашины 4 начинает раскручивать маховик 3. Гидромащина 10 выводится в наибольшее значение параметра регулирования. При этом посредством золотника 16 автоматически устанавливаетс параметр регулирования гидромашины 4, обеспечивающий поддержание заданного золотником 16 давления в магистрали 6. После раскрутки маховика 3 до нужной скорости золотниковый распределитель 17 переключается, соединяя магистраль 15 со сливом. Нуль- установителем 12 параметр регулирования гидромашины 4 выводится в нулевое значение, Выво;цится вручнздо также в нулевое значение параметр регулирования гидромашины 10. После это
го открывается запорный клапан 9 и управлением гидромашины 10 производится стравливание троса 2 с барабана 1 для закрепления его на принимающем судне. После закрепления . троса вновь переключается золотниковьй распределитель 17, подключая магистраль 15 к магистрали 18, и гидромашина 4 вводится в режим управления по давлению в магистрали 6. Включается муфта 20, соединяя кинематически барабан I через зубчатую передачу 19 с винтом 21, регулирующим величину поджатия пружины золотника
3
16 управления по давлению в магистрали 6. Устройство готово к работе в автоматическом режиме слежения.
Для обеспечения заданного провисния несущего троса 2 при изменении его длины требуемое натяжение троса определяется по формуле Р-1
т
4-h где Т - натяжение троса;
Р - вес груза;
1 - длина троса;
h - заданное провисание груза, т.е. сила натяжени i троса линейно зависит от его длины. Момент на барабане I, создаваемый силой натяжения троса, определяется по формуле
.R,
где Mg - момент на барабане; R - радиус барабана.
Момент, создаваемый гидромашиной 5 и подводимый к валу барабана I, определяется по формуле
M,p-w,
где р - рабочее давление;
W - объемная постоянная гидромашины .
Учитывая, что М Mg, получим зависимость рабочего давления р в ма- гистрали 6 от длины троса 2 в виде:
P 1-.R Р 4.h..w,
т.е. давление р линейно зависит от длины троса 1.
В режиме слежения при расхожеде- нии судов с .расстояния А, до расстояния A,j и стравливании троса 2 с длины 1, до длины 1 гидромашина 5 работает в насосном режиме, нагнетая рабо- чую жидкость в магистраль 6. Гидромашина 4 работает при этом в моторном режиме, подкручивая маховик 3. При стравливании троса вращение барабана 1 через зубчатую передачу 19 и муфту 20 передается на винт 2, которьш увеличивает поджатие пружины золотника 16 управления по давлению в магистрали 6. При использовании в золотнике 16 для его настройки цилиндрической винтовой пружины зависимость между сжатием пружины и соответствующим рабочим давлением в магистрали 6 носит линейньй характер. Таким образом, зависимость между углом поворота барабана 1 (длиной стравленного с барабана 1 троса) и давлением в магистрали 6 имеет линейный характер. Рабочее давление в магистрали 6 увеличи
0
5
0
5
п
Q г
0
0954
вается, а следовательно, увеличивается и момент на валу барабана I, что приводит к увеличению силы натяжения несущего троса до значения, обеспечивающего постоянство его провисания под действием груза. При схождении судов и выбирании троса 2 гидромашины 4 и 5 меняют режим работы, а маховик 3 в зтом полупериоде несколько теряет скорость вращения. Вращение барабана 1 опять передается на винт 21, который уменьшает поджатие пружины золотника 16, что приводит к уменьшению давления в магистрали 6, а следовательно,и к уменьшению момента на барабане, уменьшению натяжения троса и обеспечению постоянства про- . висания несущего троса.
В режиме слежения происходит потеря энергии в основном контуре маховик - барабан. Восполнение ее производится дополнительной подачей жидкости в магистраль 6 с помощью .гидромашины 10 с расходом, достаточным для поддержания средней скорости маховика 3 в определенных пределах.
После завершения грузовых операций отключается муфта 20, переключается распределитель 17, соединяя магистраль 15 со сливом, чем производится выведение машины 4 в нулевое значе- :ние параметра регулирования нуль-установителем 12. Гидромашиной 10 обеспечивается нужная слабина троса 2 и .отсоединение его от судна, после чего трос выбирается с помощью гидромашин 10 и 5. Маховик 3 за время свободного выбега останавливается-, и установка приводится в исходное положение.
Предлагаемое устройство, поддерживая постоянным провисание передаваемого груза на тросе, исключает возможность возникновения вертикальных колебаний груза. При этом повышается надежность устройства для передачи грузов в море.
Формула изобретения
Устройство для натяжения троса в судовьпс средствах передачи грузов в море по авт. св.№ 958218, о т л и- ча юще ее я тем, что, с целью повьшгения надежности, блок автоматического регулирования давления в регулируемой гидропередаче снабжен механизмом управления давлением, который кинематически связан с тросовым барабаном.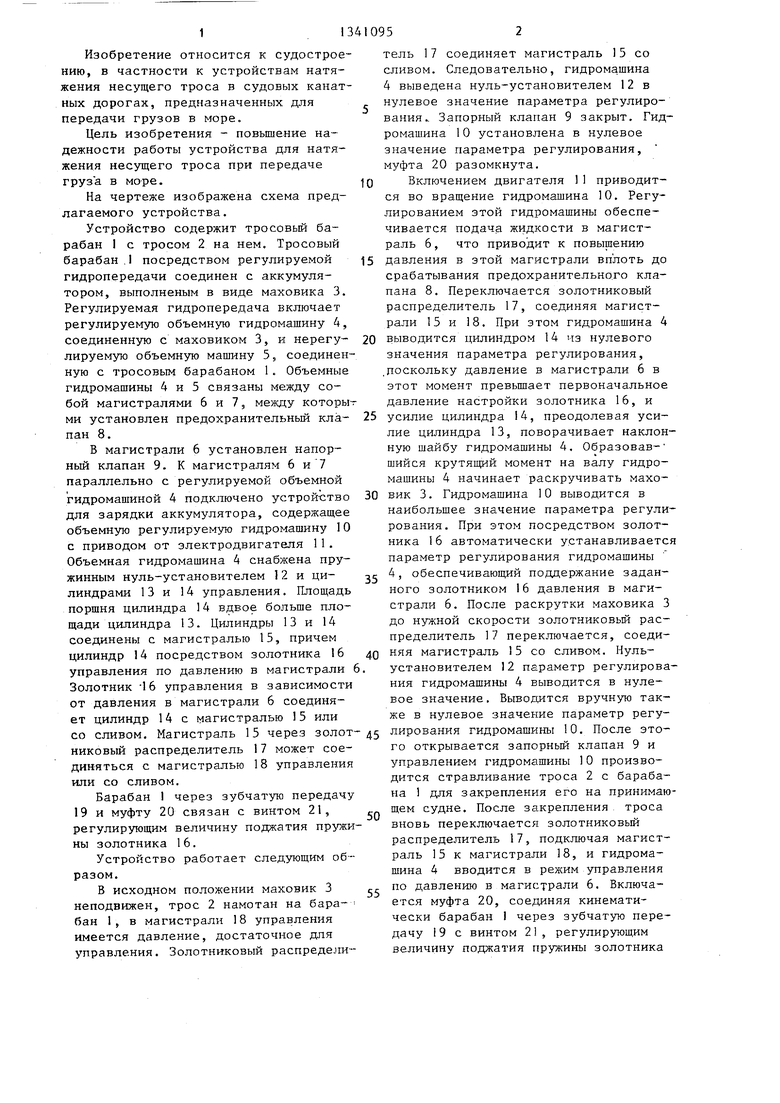

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1987 |
|
SU1416373A2 |
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1981 |
|
SU958218A1 |
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1985 |
|
SU1252237A2 |
| УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ КАНАТА В СУДОВЫХ СРЕДСТВАХ ПЕРЕДАЧИ ГРУЗОВ В МОРЕ (ВАРИАНТЫ) | 2014 |
|
RU2578636C1 |
| Тросонатяжное устройство | 1985 |
|
SU1255560A1 |
| Канатно-натяжное устройство для судового средства передачи грузов в море | 1985 |
|
SU1321629A1 |
| ГИДРООБЪЕМНАЯ ПЕРЕДАЧА | 2017 |
|
RU2651376C1 |
| Трансмиссия транспортного средства | 1979 |
|
SU897600A1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС И ГИДРАВЛИЧЕСКАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА С АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 2000 |
|
RU2172428C1 |
| Транспортное средство | 1983 |
|
SU1154117A1 |
Изобретение относится к судостроению, в частности к устройствам натяжения несущего троса в судовых канатных дорогах, предназначенных для передачи грузов в море. Цель изобретения - повьшение надежности устройства. Устройство содержит- тро- совьм барабан I с тросом 2. Барабан 1 регулируемой гидропередачей соединен с аккумулятором, выполненным в виде маховика 3. Гидропередача включает регулирующую объемную гидромашину 4, соединенную с маховиком 3, и нерегулируемую машину 5. Механизм управления давлением кинематически связан с тросовым барабаном I и содержит зубчатую передачу 19, муфту 20 и винт 21, регулирующий величину поджатия пружины золотника 16. I ил. (Л 2S -щй 17 «чш N)
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1981 |
|
SU958218A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
