Изобретение относится к машиностроению и может быть использовано для автоматизации операций загрузки-разгрузки технологического оборудования.
Известен промышленный робот (авт.св. N 776912), кл. В 25 J 9/00, 1980), содержащий основание с установленным на нем устройством поворота, имеющим вал с рукой, зубчато-реечную передачу с приводом. В качестве привода используются пневмоцилиндры, штоки которых соединены с рейкой. Положение цилиндров регулируется упорами. При подаче воздуха в один из цилиндров осевое движение штока через привод превращается во вращательное движение вала с рукой. Рука занимает требуемое положение. Позиционирование руки задается упорами, плавность ее остановки обеспечивается демпфером.
Недостатком робота описанной конструкции является то, что он обеспечивает вращение руки только в горизонтальной плоскости, т.е. обладает ограниченными технологическими возможностями. Кроме того, инерционность и сложность привода приводит к низкой точности позиционирования.
Наиболее близким к изобретению является промышленности робот, содержащий вертикальный вал с реверсивным приводом поворота, тормозное устройство, механическую руку с приводами подъема-опускания и выдвижения, модуля поворота кисти и сдвига схватов.
Привод поворота вертикального вала включает пневмодвигатель, вал которого муфтой соединяется с вертикальным валом робота. Подъем (опускание) руки осуществляется пневмоцилиндром. Тормозное устройство выполнено в виде демпферов, каретки и выдвижного упора, взаимодействующего с валом через регулируемые упоры.
При работе робота вертикальный вал поворачивается по программе на требуемый угол с последующим торможением и остановом, затем следует подъем (опускание) и выдвижение руки в нужную позицию, схват заготовки, например, и перенос ее в нужное место.
В качестве недостатков робота следует отметить сложность и инерционность конструкций приводов поворота вала и подъема (опускания) руки и тормозного устройства; низкую точность позиционирования руки.
Цель изобретения - повышение точности позиционирования и упрощение конструкции модуля манипулятора.
Это достигается тем, что в устройстве вертикальный вал выполнен в виде цилиндрического несущего на себе ротор управляющего мотора стержня, неразъемно соединенного с наружной рамкой, выполненной в виде полукольца, в опорах которого размещена с возможностью свободного вращения внутренняя рамка эллиптической формы, имеющая продолжение в одну сторону в виде механической руки со схватом, на котором расположены уравновешивающий груз, в другую - в виде оппозитно расположенной к механической руке цилиндрической направляющей, несущей на себе управляющий груз и соленоид для перемещения этого груза, а внутри внутренней рамки в опорах вращения помещен гиромотор.
Выполнение конструкции модуля манипулятора в виде вертикального вала и внутренней рамки с возможностью свободного вращения друг относительно друга и корпуса, наличие гиромотора во внутренней рамке, ротор которого имеет большую частоту вращения, позволяет совершать реверсивное вращение вертикального вала при приложении к нему момента посредством перемещения груза, а подъем-опускание механической руки при приложении к вертикальному валу момента от управляющего мотора и также исключить движение инерции после прекращения действия управляющих моментов.
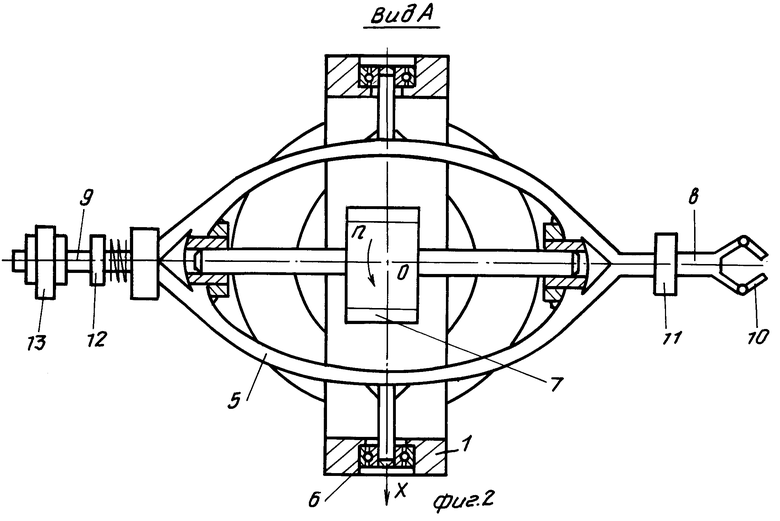
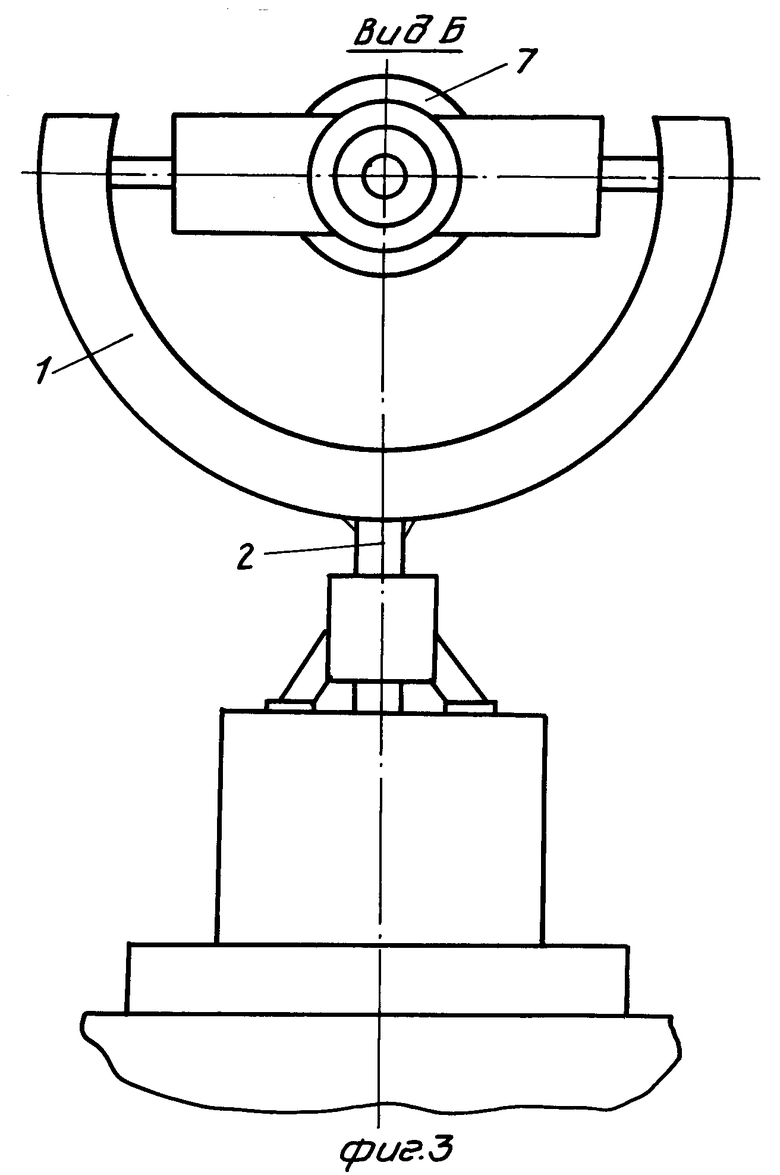
На фиг. 1 изображен общий вид модуля манипулятора; на фиг.2 - вид по стрелке А на фиг.1; на фиг.3 - вид по стрелке Б на фиг.1.
Модуль манипулятора содержит наружную рамку 1, выполненную в виде полукольца, неразъемно соединенного с вертикальным валом 2, смонтированным на опорах, размещенных в корпусе 3. Ниже полукольца на валу 2 установлен управляющий мотор (привод вращения) 4. Ротор которого посажен на вал, а статор соединен с корпусом 3.
Модуль манипулятора имеет внутреннюю рамку 5 эллиптической формы, которая расположена в подшипниках 6, закрепленных в наружной рамке 1. Во внутренней зоне рамки 5 размещен гиромотор 7, ротор которого расположен в опорах, установленных в теле рамки. Рамка 5 в направлении большой оси эллипса имеет механическую руку и оппозитно расположенную к ней цилиндрическую направляющую 9.
Механическая рука 8 оканчивается схватом 10. На ней также размещен уравновешивающий груз 11, перемещением которого вдоль оси направляющей можно смещать с целью уравновешивания центр тяжести рамки 5 относительно центра О. На направляющей 9 помещен подпружиненный управляющий груз 12 и соленоид 13. В модуле предусматривается также привод схвата и кроме того, привод перемещения всего модуля.
Модуль манипулятора работает следующим образом. Ротору гиромотора 7 сообщают большую частоту вращения (n ≥ 15000 1/мин). При подаче напряжения на управляющий мотор 4 возникает момент относительно вертикальной оси Z модуля, который вызывает прецессионное вращательное движение (против часовой стрелки или по часовой стрелке в зависимости от знака момента) внутренней рамки 5 относительно оси Х. Вместе с ней перемещается и механическая рука 8 с переносимым грузом в вертикальной плоскости.
При приложении управляющего момента по часовой стрелке, например, рука 8 будет опускать перемещаемый груз.
Перемещая соленоидом 13 управляющий груз 12 вдоль цилиндрической направляющей 9 относительно некого равновесного положения в ту или другую сторону, вызывают прецессионное движение наружной рамки 1 вокруг оси Z, а вместе с ней и перемещение переносимого груза в горизонтальной плоскости. Если момент от груза 12 будет направлен, например, по часовой стрелке относительно оси Х, то рука с переносимым грузом будет вращаться в горизонтальной плоскости против часовой стрелки.
В итоге поверхность, по которой движется переносимый груз, является сферической.
Подача напряжения на соленоид 13 управляющего груза 12 и на управляющий мотор 4, вызывающая перемещение механической руки в горизонтальной и вертикальной плоскостях, осуществляется по программе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельный узел | 1989 |
|
SU1664469A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| Промышленный робот | 1983 |
|
SU1127766A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
Использование: для автоматизации операций загрузки-разгрузки технологического оборудования. Наружная рамка 1 выполнена в виде полукольца и соединена с вертикальным валом. Внутренняя рамка 5 эллиптической формы расположена в опорах наружной рамки. Во внутренней рамке помещен гиромотор 7, а на вертикальном валу - управляющий мотор. С внутренней рамкой связана механическая рука и направляющая 9 с управляющим грузом 12. При работе манипулятора гиромотору сообщают большую частоту вращения. При приложении крутящего момента к вертикальному валу или к оси внутренней рамки механическая рука с грузом совершает перемещение. При прекращении действия крутящих моментов рука с грузом останавливается, движение инерции отсутствует. Это обеспечивает более высокую точность позиционирования переносимого груза. 3 ил.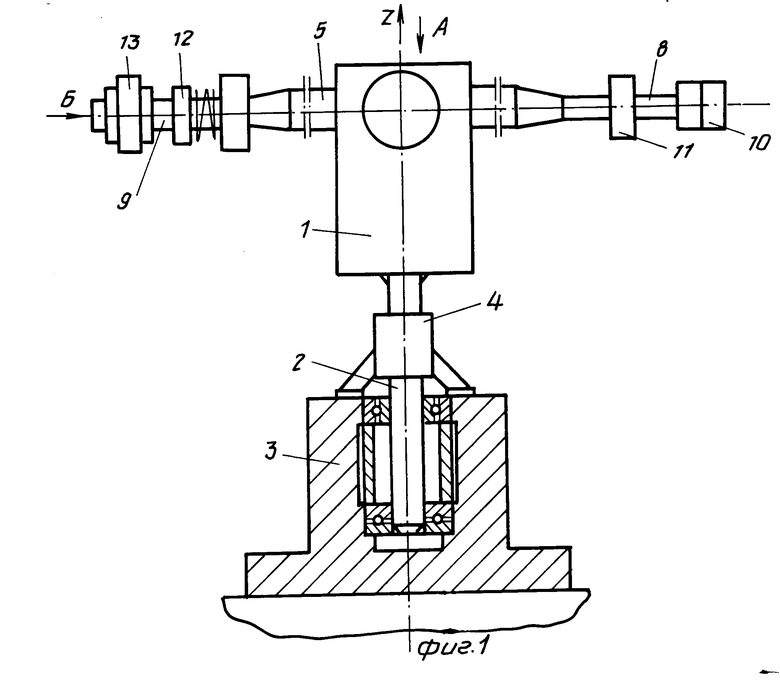
МОДУЛЬ МАНИПУЛЯТОРА, содержащий вертикальный вал с приводом его вращения, установленный в опоре корпуса, механическую руку с приводом подъема-опускания, отличающийся тем, что он снабжен наружной рамкой, выполненной в виде полукольца, жестко связанного с вертикальным валом, внутренней рамкой эллептической формы, размещенной в опорах наружной рамки с возможностью свободного вращения, и гиромотором, расположенным в опорах внутренней рамки вдоль большой оси эллипса, а также уравновешивающим грузом, управляющим грузом и соленоидом, расположенными снаружи внутренней рамки на дополнительно выполненных направляющих, оси которых совпадают с осями опор под гиромотор, при этом на одной направляющей расположены механическая рука и уравновешивающий груз, а на другой - соленоид и связанный с ним управляющий груз.
| Промышленный робот | 1988 |
|
SU1542793A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
