Изобретение относится к области машиностроения и может быть использовано при создании и разработке средств автоматизации технологических процессов и складских работ.
Известен манипулятор, содержащий вертикальную поворотную стойку, механическую руку с захватом и приводной электродвигатель.
Недостатком известного манипулятора является повышенные динамические нагрузки в узлах и звеньях манипулятора из-за громоздкости и сложности приводов.
Известен также манипулятор, содержащий вертикальную поворотную стойку, механическую руку с захватом и приводной электродвигатель.
Однако он обладает теми же недостатками.
Цель изобретения состоит в устранении упомянутых недостатков известных манипуляторов, а именно в расширении технологических возможностей и улучшении динамических характеристик.
Поставленная цель достигается тем, что манипулятор снабжен приводом наклона механической руки, двигатель которого смонтирован на стойке и кинематически связан с механической рукой, при этом стойка имеет параллельные стержневые элементы, а привод поворота механической руки выполнен в виде основного и дополнительного двигателей, размещенных на основании, и . планетарного редуктора, центральные зубчатые колеса которого обvj СО
со ся о
разуют первый блок зубчатых колес, установленный на одном из стержней стойки и кинематически связанный с основным двигателем, причем сателлит планетарного редуктора выполнен в виде второго блока зубчатых колес, установленного на другом стержне стойки и кинематически связан с дополнительным двигателем посредством дополнительно введенного третьего блока зубчатых колес, размещенного на валу пер- вого блока.
Введение упомянутых изменений в манипулятор обеспечивает расширение технологических возможностей и улучшение динамических характеристик.
На чертеже схематически изображен предложенный манипулятор.
Манипулятор содержит основание 1 с установленным на ней электродвигателем 2, на валу которого установлено зубчатое колесо 3, связанное с блоком колес 4, 5, установленным с возможностью свободного вращения на стойке-водиле 6. На водиле 6 также с возможностью свободного вращения установлен блок шестерен 7, 8. Шестер- ня 8 входит в зацепление с шестерней 9, которая жестко связана с шестерней 10. Блок шестерен 9, 10 установлен с возможностью свободного вращения относительно блока шестерен 4, 5. Шестерня 10 входит в зацепление с шестерней 11, установленной на валу 12, жестко связанном с ротором двигателя 13, снабженного муфтой 14, обеспечивающей возможность присоединения ротора двигателя 13 к основанию 1. На во- диле 6 установлен двигатель 15, на роторе которого неподвижно насажена шестерня 16, сходящая в зацепление с шестерней 17, установленной с возможностью перемещения относительно водила 6. На шестерне 17 жестко закреплено звено 18, на котором установлен приводной гидроцилиндр 19 на штоке 20 которого жестко установлена механическая рука 21 со схватом, несущая деталь 22.
Манипулятор работает следующим образом.
При включении муфты 14, обеспечивающей жесткое соединение ротора двигателя 13 с основанием 1, шестерня 11 также ста- новится неподвижной относительно станины, при этом двигатель 13 отключен от сети. Включение двигателя 2 обеспечивает передачу вращения на шестерню 3 и от ее на блок шестерен 4, 5, последние установлены с возможностью вращения относительно стойки-водила 6. Вращение от шестерни 5 передается на шестерню 7 блока шестерен 7, 8. При этом блок шестерен 7, 8, совершая вращение вокруг собственной оси вращения со скоростью (У , совершает планетарное движение со скоростью at of вокруг оси симметрии стойки-водила 6 (оси Z). При этом шестерня 8 обегает шестерню 8 блока шестерен 9, 10 в связи с тем, что он неподвижный, т.к. шестерня 10 сцепляется с неподвижной шестерней 11.
В рассмотренном случае стойка водила 6 вращается вокруг оси симметрии (оси Z)co
скоростью со- оР планетарного движения блока шестерен 7, 8, которое определяется из следующих соображений.
Передаточное отношение is в обращенном движении имеет вид
Zg
Za
Из этого уравнения после некоторых преобразований получаем
Ctf - О)1 0)5 1нч
Шн 1
|57н 0)5-0) Z (07 - 0)н Z5
(1)
где - 1Нч -щ
1Z Zg
z5-z8
Из этого соотношения видно, что угловая скорость стойки-водила 6 может быть весьма малой при большом значении скорости вращения двигателя 2. Это можно объяснить тем, что, например, при подборе чисел зубьев , , выражение (1) имеет вид
. 1
нч
1 99 101
10.000
100 100
Такая возможность реализации большой редукции с помощью небольшого количества звеньев позволяет снизить материалоемкость манипулятора и тем самым снизить его динамическую нагружен- ность от сил инерции в процессе разгона (торможения).
Для перемещения детали 22 в пространстве кроме включения двигателя 2 необходима также одновременная работа двигателя 15 и гидроцилиндра 20.
В случае включения муфты 14, обеспечивающей отсоединение ротора двигателя 13 основания 1 и включение его в сеть, вращение от шестерни 11 передается шестерне 10 и шестерне 9, жестко связанной с последней. При этом передаточное отношение в обращенном движении изменяется в связи
С ДВУМЯ УГЛОВЫМИ СКОРОСТЯМИ )5И 0)9
Z9 (1)7-0)-. Z8
(2)
-f|.
(3)
Решение системы уравнений (2)-(3) совместно дает возможность записать уравнение (2) в виде
(05 -Он Z Z9
(4)
Z5 -Ze
После некоторых преобразований уравнение (4) можно представить в виде
0)
(О5 + O)UY
1 ZyZg
(5)
Z5 -Ze
Выражение (5) указывает на то, что изменением угловой скорости двигателя 13 представляется возможность не только увеличить или уменьшить скорость вращения стойки-водила 6, но и остановить стойку-во- дило 6 без остановки других подвижных звеньев. Как видно из формулы (6), остановка водила б будет прий)н 0, т.е. при
СО5 ша -у- . Это говорит о том, что, исполь 5
зуя в качестве приводного двигателя 13 двигатель с бесступенчатым регулированием скорости, например, двигатель постоянного тока, представляется возможность изменить закон движения детали 22 вдоль заданной траектории без остановки подвижных звеньев манипулятора, т.е. без отключения двигателей 2, 15 и гидроцилиндра 20.
Предлагаемая конструкция манипулятора обеспечивает необходимые минимальные три подвижности (три обобщенные координаты: поворот стойки-водила 6, поворот звена 18 и поступательное перемещение штока 21) при наличии минимального числа звеньев и большой редукции, Кроме этого, предлагаемая конструкция позволяет плавно, без остановки (отключения) основ- ных приводных двигателей, изменять закон
10
35
15
20
25
25
30
движения схвата (детали 22) вдоль заданной траектории. Она обеспечивает также и остановку водила-стойки 6. Все это позволяет не только снизить динамическую нагружен- ность, но и повысить точность позиционирования путем установления обратной связи (коррекции) действительного перемещения схвата или его плавной остановки, тем самым достигается расширение технологических возможностей.
Формула изобретения Манипулятор, содержащий основание, установленную на нем поворотную стойку, несущую механическую руку с приводом ее выдвижения и захватом, а также привод поворота механической руки, отличающийся тем, что, с целью расширения технологических возможностей и улучшения динамических характеристик, он снабжен приводом наклона механической руки, двигатель которого смонтирован на стойке и кинематически связан с механической рукой, при этом стойка имеет параллельные стержневые элементы, а привод поворота механической руки выполнен в виде основного и дополнительного двигателей, размещенных на основании, и планетарного редуктора, центральные зубчатые колеса которого образуют первый блок зубчатых колес, установленный на одном из стержневых элементов стойки и кинематически связанный с основным двигателем, причем сателлит планетарного редуктора выполнен в виде второго блока зубчатых колес, установленного на другом стержневом элементе стойки, и кинематически связан с дополнительным двигателем посредством дополнительно введенного третьего блока зубчатых колес, размещенного на валу первого блока.
Я 20 /2/,22
/5
У
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1521577A1 |
| Роботизированный комплекс горячей штамповки | 1988 |
|
SU1613235A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор | 1979 |
|
SU772839A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Планетарный прецессионный редуктор | 1991 |
|
SU1825914A1 |
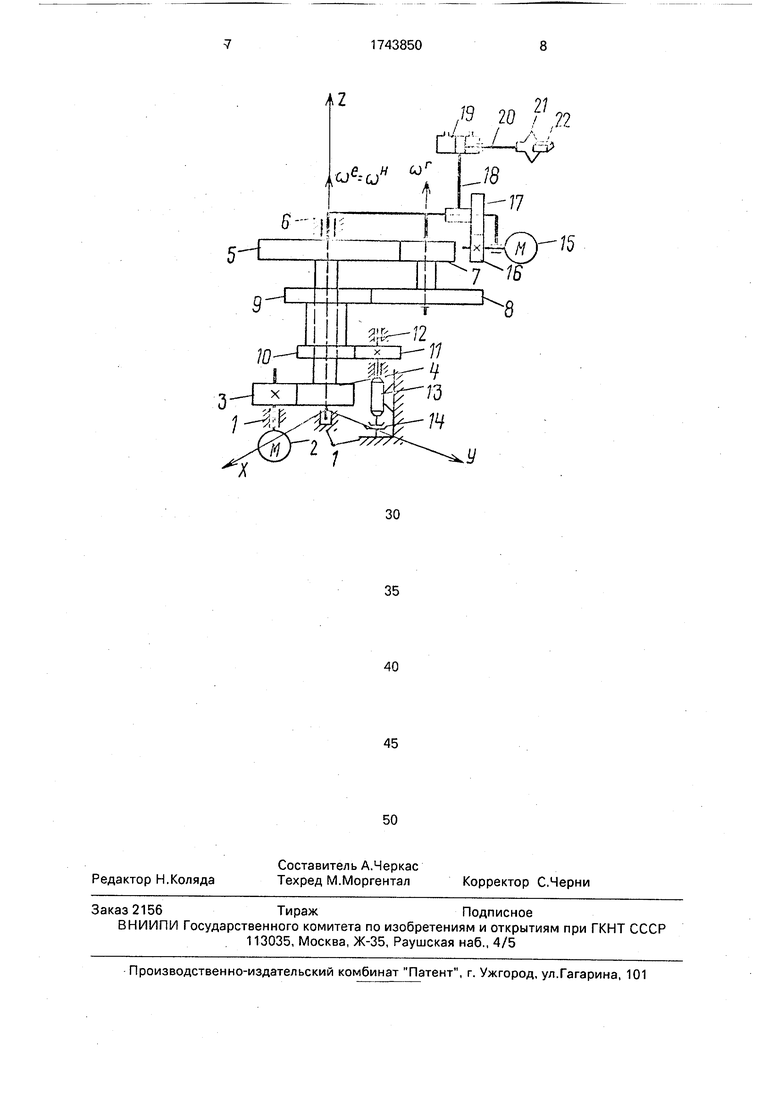
Использование: автоматизация технологических процессов и складских работ в машиностроении. Сущность изобретения: манипулятор состоит из основания 1, установленной на нем поворотной стойки 6 в виде параллельных стержневых элементов, связанных стержнем, перпендикулярным к стержневым элементам, и механической руки 21 с приводами ее выдвижения, наклона и поворота. Привод наклона механической руки 21 выполнен в виде двигателя, смонтированного на поворотной стойке 6 и кинематически связанного с механической рукой 21, а привод поворота механической руки 21 выполнен в виде основного 2 и дополнительного 13 двигателей, размещенных на основании 1, и планетарного редуктора, центральные зубчатые колеса 4, 5 которого образуют первый блок зубчатых колес, установленный на одном из стержневых элементов стойки и кинематически связанный с основным двигателем 2, причем сателлит планетарного редуктора выполнен в виде второго блока зубчатых колес 8, 7, установленного на другом стержневом элементе стойки и кинематически связан с дополнительным двигателем 13 посредством третьего блока зубчатых колес 9, 10, размещенного на валу первого блока. 1 ил. со
| Манипулятор | 1981 |
|
SU960006A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
